
船用平台罗经模拟器的设计
2015-08-14 21:06罗飞仁沈括汪铭东
现代电子技术 2015年15期
罗飞仁+沈括+汪铭东

摘 要: 为了在船用设备修理过程中提供可用的平台罗经信号,介绍了使用于某设备的平台罗经模拟器实现过程,该方案以单片机+FPGA+DSC模块为核心,单片机实现人机交互,FPGA实现系统逻辑控制,DSC模块生成平台罗经信号。实测表明,该方法设计简单,满足船载设备的要求,可以实现转速比为1[∶]36的粗精双通道罗经信号模拟。
关键词: FPGA; DSC; 罗经; 伺服系统
中图分类号: TN802?34 文献标识码: A 文章编号: 1004?373X(2015)15?0060?03
Design of platform compass simulator for marine
LUO Feiren, SHEN Kuo, WANG Mingdong
(Unit 92932 of PLA, Zhanjiang 524016, China)
Abstract: To provide available platform compass signal in marine equipment maintenance process, the implementation of platform compass simulator used for a certain marine equipment is introduced. This system takes microcontroller, FPGA and DSC modules as control centre. Microcontroller is used to realize human?computer interaction, FPGA is used to implement system logic control, and DSC is used to generate platform compass signal. The actually measured results show that this system is simple to design and can meet the requirements of the marine equipment. It can realize rough channel and refined channel compass signal simulation, whose rotating speed ratio is 1[∶]36.
Keywords: FPGA; DSC; compass; servo system
0 引 言
由于舰船航行中,受到海浪影响,造成船体摆动,使雷达等设备平台无法相对大地平面静止,为保证使用精度,稳定雷达天线平台,雷达必须使用平台罗经数据,消除舰船摇摆的影响。
在船上,使用罗经数据需要协调多个部门,严重影响设备修理进度与修理、调试质量。为解决这一矛盾,本文针对某型号雷达特点,研制了适用于该雷达的平台罗经模拟器。
1 原理
1.1 雷达稳定平台原理
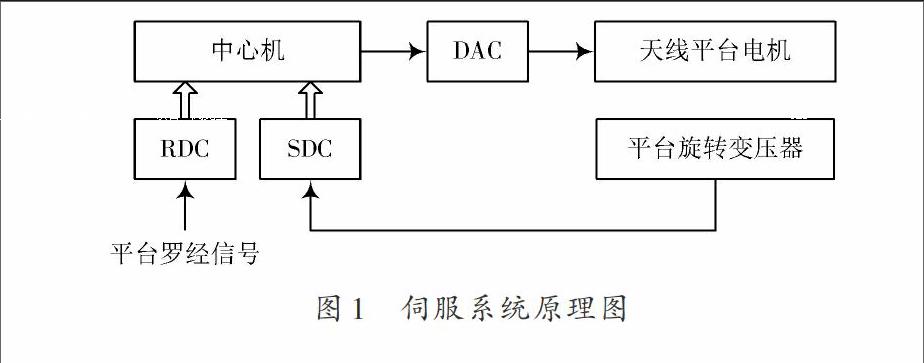
该型雷达使用粗精双通道平台罗经信号,进行船摇信号的隔离,伺服系统的原理图如图1所示。
伺服系统工作时,船摇RDC模块将平台罗经送来的横摇、纵摇信号转换为数字信号,送至中心机。同时,天线的俯仰角旋转变压器检测天线当前的俯仰角度,并将该信号送到天线SDC模块,转换为数字信号后送至中心机。中心机接收到RDC模块和SDC模块数据后,对该数据进行比对、解算,计算出俯仰角度误差,送至误差DAC芯片输出,用于驱动天线俯仰电机,向减小这种误差的方向运动,克服船摇对天线的影响,保证天线平台的稳定。
图1 伺服系统原理图
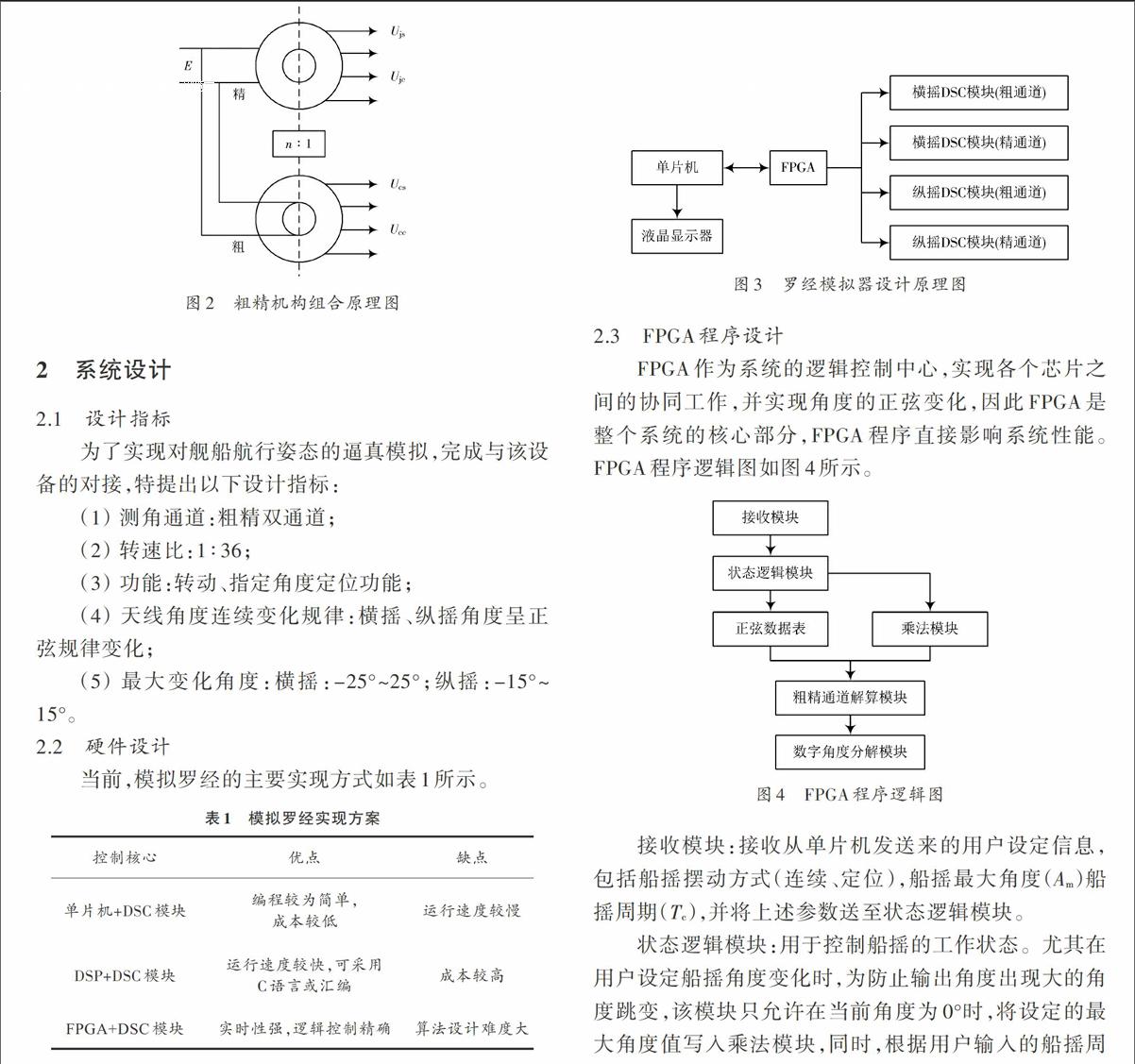
1.2 粗精机构测角原理
在单通道转换器的测角系统中,转换器的分辨力最终要受到测角元件制造误差的限制。在许多测角精度要求较高的场合,这种转换器难以胜任[1],而粗精双通道测角由于采用了精通道数据进行校正,其测角精度是单通道测角系统的[N]倍[2?3]。粗精机构组合原理如图2所示。
粗精机构组合的含义是粗示机构轴角转过1圈时,精示机构轴角则转过[n]圈[4],即由粗示确定轴角的粗略,由精示确定轴角的精确位置,粗精角组合得到真实的机械轴角[5]。
图2 粗精机构组合原理图
2 系统设计
2.1 设计指标
为了实现对舰船航行姿态的逼真模拟,完成与该设备的对接,特提出以下设计指标:
(1) 测角通道:粗精双通道;
(2) 转速比:1[∶]36;
(3) 功能:转动、指定角度定位功能;
(4) 天线角度连续变化规律:横摇、纵摇角度呈正弦规律变化;
(5) 最大变化角度:横摇:-25°~25°;纵摇:-15°~15°。
2.2 硬件设计
当前,模拟罗经的主要实现方式如表1所示。
表1 模拟罗经实现方案
[控制核心\&优点\&缺点\&单片机+DSC模块\&编程较为简单,
成本较低\&运行速度较慢\&DSP+DSC模块\&运行速度较快,可采用
C语言或汇编\&成本较高\&FPGA+DSC模块\&实时性强,逻辑控制精确\&算法设计难度大\&]
在本设计中,由于需要实现横摇、纵摇粗精通道的角度计算,同时使用的DSC为14位数字输入,并且需要实现较好的人机交互,只使用单片机、DSP或者FPGA,虽然能完成该设计,但程序设计难度较大。所以为降低难度,简化设计,本系统提出了单片机+FPGA+DSC模块的硬件实现方案,系统原理图如图3所示。
系统设计中,利用单片机编程简单,容易实现与液晶显示器互连的特点,使用单片机作为控制中心,用于接收用户设定的罗经运行数据,并且实现与FPGA的互连,实现当前横摇、纵摇信息的实时显示。利用FPGA强大的逻辑控制能力和大量的I/O管脚的特点,将FPGA作为系统的逻辑控制中心,用于实现对角度的计算,同时完成对角度粗精通道的分解,并将数据送至DSC模块,实现角度的传送。
图3 罗经模拟器设计原理图
2.3 FPGA程序设计
FPGA作为系统的逻辑控制中心,实现各个芯片之间的协同工作,并实现角度的正弦变化,因此FPGA是整个系统的核心部分,FPGA程序直接影响系统性能。FPGA程序逻辑图如图4所示。
图4 FPGA程序逻辑图
接收模块:接收从单片机发送来的用户设定信息,包括船摇摆动方式(连续、定位),船摇最大角度(Am)船摇周期(Tc),并将上述参数送至状态逻辑模块。
状态逻辑模块:用于控制船摇的工作状态。尤其在用户设定船摇角度变化时,为防止输出角度出现大的角度跳变,该模块只允许在当前角度为0°时,将设定的最大角度值写入乘法模块,同时,根据用户输入的船摇周期,控制对ROM表的查询速度。
正弦数据表:根据设计需求,角度需要呈正弦变化,因此在FPGA中需要实现正弦计算。但对于FPGA而言,要实现正弦计算,需要进行单独的算法设计,难度较大。基于正弦值的对称性,将第一区间的正弦值存储于ROM中采用查表法,通过读写顺序的变化,获取正弦值。该模块采用状态机实现,如图5所示。
State1和State3为正序读取ROM表,State1实现第一象限值,State3将读取值进行反相实现第三象限值;State2和State4逆序读取ROM表,State2实现第二象限值,State4将数据反相后实现第四象限值。
图5 正弦数据表状态机
乘法模块:将用户设定的最大船摇角度和查询得到的正弦值相乘,实现[a(t)=Am×sin(2π×Δt),]其中,[a(t)]为计算得到的当前值。
粗精通道解算模块:将乘法模块计算得到的角度值,根据1[∶]36的转速比,转换为对应的粗精双通道角度数据。
数字角度分解模块:由于使用的DSC模块为14位数字角度输入,因此该模块将粗精通道的角度数据分解成14位的数字角度值送到DSC模块。
3 结 论
本文采用单片机+FPGA+DSC模块的设计方案,以FPGA为控制核心,使用查表法实现正弦值计算,实现了粗精双通道,转速比为1[∶]36的罗经模拟器设计。经过实际测试,该系统满足设计要求。
参考文献
[1] 梁海波,张庆,高延滨.基于ARM7微控制器的双速轴角/数字处理器的设计[J].应用科技,2008,35(3):46?49.
[2] 杨波.适用于粗/精同步机高精度测量系统双速处理器的研制[J].佛山科学技术学院学报:自然科学版,2003,21(2):29?31.
[3] 徐大林,高文政.基于FPGA的多极旋转变压器粗、精数据组合双速处理器的设计与实现[J].测控技术,2006,25(5):42?45.
[4] 王星民,郭盛杰.多极旋转变压器测角原理及实现方法[J].山西电子技术,2011(6):24?25.
[5] 张莉松,胡祐得,徐立新.伺服系统原理与设计[M].北京:北京理工大学出版社,2008.
[6] 任鹏会,郑刚,麻红梅.双通道伺服系统的数字化实现[J].现代电子技术,2005,28(18):116?117.
[7] 欧全梅.基于ARM核嵌入式微处理器的以太网应用[J].现代电子技术,2006,29(15):34?36.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
测控技术(2018年12期)2018-11-25
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
