基于测量噪声确定传感器动态补偿的理想指标
2015-08-10 10:10吴义平徐科军杨双龙
计量学报 2015年3期
吴义平, 徐科军, 杨双龙
(合肥工业大学电气与自动化工程学院,安徽合肥230009)
基于测量噪声确定传感器动态补偿的理想指标
吴义平, 徐科军, 杨双龙
(合肥工业大学电气与自动化工程学院,安徽合肥230009)
测量噪声是影响传感器动态补偿效果的主要因素,对在噪声环境下传感器动态补偿所能达到的理想效果进行了研究。提出根据测量噪声确定传感器动态补偿后理想工作带宽的方法,使用该理想带宽可进一步确定补偿后时域性能指标中调节时间与超调量的理想值。将该方法应用于应变天平的动态校准实验,验证了其有效性。进而采用该方法评定应变天平经动态补偿后能够满足飞行器舱门风洞动态试验的要求,表明该方法可用于确定传感器动态补偿后是否适用于动态试验。
计量学;测量噪声;动态补偿;应变天平
1 引 言
在利用传感器对动态信号进行测量时,因传感器的工作频带不够宽,不足以覆盖动态信号中包含的所有频率分量,而使部分高频分量受到不同程度的衰减,造成测量结果与真值之间存在较大的动态误差。为了得到准确的动态测量结果,需要改善传感器的动态特性。这有两条途径。一是改变传感器的结构和参数[1]。由于受物理原理及技术工艺的限制,且要兼容原本良好的静态性能指标,所以,实现起来较为复杂和困难。二是设计动态校正系统对传感器输出信号进行动态补偿[2~4]。即通过对传感器输出信号进行后续处理,以实现所期望的动态特性。第二种途径灵活性好、通用性强、易于实现。所以,随着传感器向智能化、精细化的方向发展,利用动态补偿器来改善传感器动态性能已成为一个研究热点[5~9],并研究出多种动态补偿器的设计方法,例如,针对测振传感器的零极点配置动态补偿法[10]、针对杆式风洞应变天平的系统辨识动态补偿法[11]、针对机器人腕力传感器的FLANN动态补偿法[12]等,均在一定程度上改善了传感器的动态响应速度,展宽了传感器的工作频带,减小了动态测量误差。但是,这种改善是否达到了理想的效果,即是否是最佳的动态补偿,尚未见深入研究报道。
为此,本文提出基于测量噪声的传感器动态补偿后理想指标的确定方法。为了验证所提方法的有效性,将此方法应用于杆式应变天平动态校准实验。经验证有效后,采用该方法评定应变天平经动态补偿后能够满足舱门风洞动态试验的要求。
2 方法步骤
2.1 频域理想指标的确定
对传感器进行动态补偿,展宽传感器的工作频带,这既提高了传感器的动态响应速度,也增加了传感器对高频噪声的敏感程度。在实际测量中,噪声是不可避免的。所以,对传感器进行动态补偿,展宽其工作频带必须有一定的限度,要考虑噪声的影响,将噪声幅度控制在允许的范围内,以保证测量结果可信。基于测量噪声的传感器动态补偿后理想工作带宽的确定,依据的是测量噪声占有用信号的比重必须小于某一阀值。而该阀值与传感器工作带宽计算标准有关。以±A增益误差带为传感器工作带宽计算标准,可确定传感器工作带宽fw。即传感器测量此工作带宽内频率信号,测量误差保持在±A内。基于测量噪声的传感器动态补偿后理想工作带宽确定的流程图如图1所示。

图1 补偿后理想带宽确定流程图
基于测量噪声确定传感器动态补偿后理想工作带宽的基本步骤为:
①从测量输出y(t)中分离出测量噪声e(t),并得到分离噪声后输出y0(t)。主要利用系统辨识法确定传感器系统的数学模型,将模型输出与实际系统测量输出之误差作为系统的测量噪声e(t),将模型输出作为分离噪声后输出y0(t)。
②对测量噪声e(t)与分离噪声后输出y0(t)分别作快速傅里叶变换(FFT)得E(f)与Y0(f),再得到频域各频率点处测量噪声与分离噪声后输出幅值比:

式中:f为信号的频率;M(f)为各频率点处测量噪声与分离噪声后输出幅值比。由于传感器对信号的衰减程度随着信号频率的增大而增大。而假设噪声是在传感器输出端引入的随机噪声,未经过传感器作用,在整个频域内均匀分布。所以,所求幅值比总体趋势为随频率增大而增大,如图2所示。
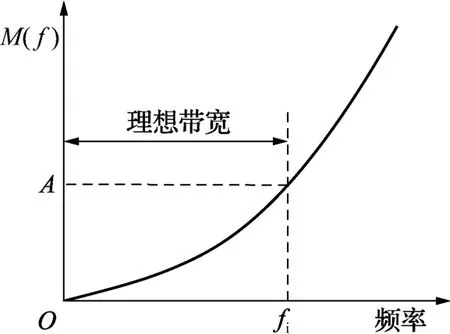
图2 测量噪声与分离噪声后输出幅值比
③确定传感器动态补偿后理想工作带宽。将幅值比M(f)等于A时对应的频率值定义为基于测量噪声确定的传感器动态补偿后的理想工作带宽fi。
应用动态补偿技术将测量系统工作带宽展宽至理想带宽fi,由于在此理想带宽fi内噪声占信号的比重小于A,所以测量误差仍能保持在±A内。若应用动态补偿技术未将测量系统工作带宽展宽至理想带宽fi,则说明其工作带宽还有展宽余地。若应用动态补偿技术使系统的工作带宽fc大于理想带宽fi,则因fi至fc频率范围内,噪声占信号的比重大于A。考虑噪声影响,fi至fc频率范围内信号的实际测量误差已超过±A,如图3所示。因此,考虑噪声影响,系统经动态补偿后工作带宽实际并未超过基于测量噪声确定的理想带宽fi。理想带宽fi为传感器经动态补偿后能够展宽的工作带宽的上限。

图3 补偿后工作带宽与理想带宽
2.2 时域理想指标的确定
采用基于OE模型预报误差法的系统辨识法设计补偿器时,通过基于测量噪声确定的补偿后理想带宽,可进一步确定补偿后时域指标超调量和调节时间的理想值。
系统辨识法设计动态补偿器的原理框图如图4所示。等效系统为所期望的理想系统,由人为根据理想动态特性设定。动态校准实验数据为动态校准实验中传感器的实际阶跃响应输出经滤波消噪后的数据。阶跃输入信号u(k)根据动态校准实验数据y(k)构造,使其阶跃跳变点及阶跃幅值与y(k)的跳变点及稳态幅值相同。以等效系统的阶跃响应输出yd(k)作为期望输出,动态校准实验数据y(k)作为补偿器输入,以使补偿器实际输出yc(k)与yd(k)的差别最小为目标,通过系统辨识法辨识补偿器参数。系统辨识前,需先设定期望等效系统的动态性能参数及待辨识的补偿器的阶数。这需要依据辨识结果不断调整,直至达到最佳补偿效果。

图4 系统辨识法设计动态补偿器原理示意图
由于二阶系统其阻尼比和固有频率与超调量及调节时间有确定的关系,且结构简单,构造方便,因而此处选择理想二阶系统作为等效系统。等效系统阻尼比设为理想阻尼比0.707。等效系统固有频率根据理想带宽选取,选取的固有频率需使等效系统的工作带宽为基于测量噪声确定的补偿后理想带宽。
因为φ(j0)=1,根据工作带宽的定义,
式中ωn为系统固有频率,ωi=2πfi。根据式(3)可算出应设置的等效系统固有频率值。
因等效系统已确定,辨识的作用是使整个级联系统逼近等效系统,故可以等效系统的时域超调量与调节时间作为整个系统超调量与调节时间补偿后理想值。当阻尼比ξ=0.707时,σ=e-ξπ■1-ξ2× 100%=4.32%。以响应到达并保持在终值±5%内为调节时间计算标准时,调节时间ts≈3.3/ωn。
故以理想二阶系统作为等效系统时,通过理想带宽确定的超调量理想值为4.32%,而调节时间理想值与固有频率有关,约为3.3/ωn。固有频率ωn与理想带宽fi满足式(3)。即实现了通过基于测量噪声确定的补偿后理想工作带宽,进一步确定时域指标超调量和调节时间的补偿后理想值,解决了动态补偿到底能够将传感器调节时间缩短至什么程度的问题。
3 方法验证
为验证所提方法在实际实验中的有效性,将此方法应用于杆式应变天平动态校准实验。在某空气动力研究院对φ10mm杆式应变天平进行了动态校准实验。实验采用负阶跃响应法进行。动态校准实验装置示意图如图5所示。天平上装了加载头。砝码通过钢丝悬挂在加载头上,对天平施加力或力矩;然后,突然剪断钢丝实现对天平施加负阶跃形式的力或力矩作用。应变天平各方向阶跃响应实验数据由高精度动态数据采集仪进行同步采集。天平动态校准实验现场如图6所示。

图5 天平动态校准实验装置示意图

图6 天平动态校准实验现场图
在φ10 mm杆式应变天平动态校准实验中,当阶跃载荷为49 N时,Fx通道阶跃响应输出曲线如图7所示(含有噪声干扰)。此时系统调节时间为43.6ms、超调量为69.5%。为能应用所提出的基于测量噪声确定传感器动态补偿后理想工作带宽及时域指标理想值的方法,需从阶跃响应输出曲线中提取出噪声信号。对Fx通道阶跃响应输出数据进行数学建模。由阶跃响应输出构造出阶跃输入信号,利用输入输出信号关系,采用系统辨识方法对天平Fx通道进行数学建模:

式中y(t)=y0(t)+Δy0(t);G(z)为天平Fx方向动态数学模型;u0(t)和y0(t)分别为系统的实际输入和输出序列;Δy0(t)为未知的测量噪声。采用针对随机信号建模较为准确的预报误差(PE)法,辨识天平输出误差模型(OE模型)参数。根据动态校准实验中天平Fx通道阶跃响应输出数据,辨识出天平Fx通道动态数学模型:

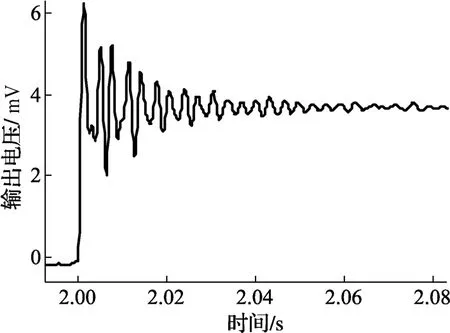
图7 天平阶跃响应曲线
图8为模型输出与天平Fx通道阶跃响应输出的比较。

图8 天平实际输出与模型输出曲线
根据y(t)=y0(t)+Δy0(t),以实验实际响应输出减去模型输出即得到动态实验中的测量噪声。然后,对噪声与模型输出作快速傅里叶变换,求得频域各频率点处噪声与模型输出幅值比,如图9所示。所得噪声与模型输出幅值比总体趋势为随频率增大而增大,这是由于传感器对信号的衰减程度随着信号频率的增大而增大,而噪声在传感器输出端引入。取A为2%,即以±2%增益误差带为工作带宽的计算标准,此时幅值比等于2%时对应的横坐标频率值即补偿后理想带宽值为49.49Hz。测量频率低于49.49 Hz的信号时,噪声占有用信号比重小于2%,测量误差能保持在2%内。而测量频率高于49.49 Hz的信号时,噪声占有用信号比重超过2%,测量误差超过2%。
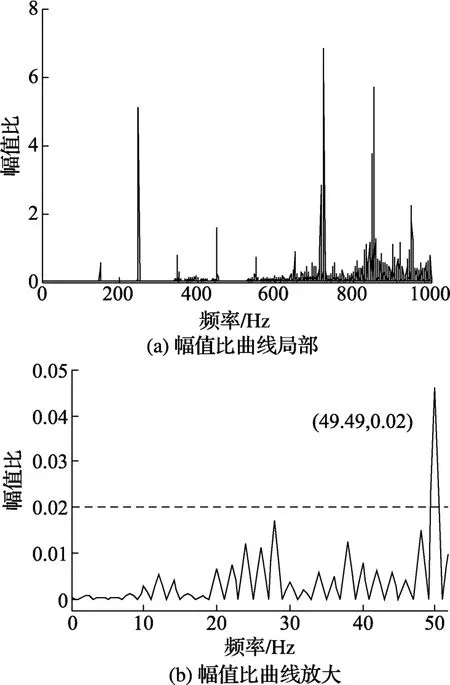
图9 幅值比曲线
采用系统辨识法以二阶理想系统作为等效系统进行补偿时,通过理想带宽值49.49 Hz计算得到等效系统固有频率应设置为112 Hz。以此二阶系统时域指标为补偿后时域指标理想值,则超调量理想值为4.32%,再代入公式ts≈3.3/ωn,得到调节时间理想值为4.7ms。
系统辨识补偿前,需先设定待辨识的补偿器的参数。依据辨识结果不断调整,直至达到最佳补偿效果。采用系统辨识法设置不同补偿器参数(补偿器分子的阶数,补偿器分母的阶数,延迟环节阶数)时,补偿效果见表1。延迟环节阶数一般设置为零。
由表1可见,最佳补偿效果时补偿器为(7,8,0)。此时天平Fx通道实际响应输出动态补偿前后曲线如图10所示。图10中,实线为动态补偿前信号曲线,虚线为经动态补偿后的信号曲线。经过补偿,超调由69.5%减小为4.8%,调节时间由43.6 ms缩短为5.2ms。图11为动态补偿前后系统的幅频特性曲线图,虚线为动态补偿前系统幅频特性曲线,实线为经动态补偿后的系统幅频特性曲线。补偿后系统工作带宽由29.21 Hz展宽至49.09 Hz。

表1 不同补偿器参数时杆式天平补偿结果

图10 动态补偿前与补偿后输出曲线

图11 补偿前后系统幅频特性
经过动态补偿后杆式应变天平Fx通道的工作带宽为49.09 Hz,接近基于测量噪声确定的理想带宽49.49 Hz;补偿后,时域超调量为0.048,调节时间为5.2ms,也接近由理想带宽确定的各自理想值4.32%与4.7ms。
4 方法应用
实际实验验证了该基于测量噪声确定补偿后理想工作带宽与时域指标理想值的方法的有效性,进而将该方法应用于飞行器舱门的风洞动态试验,以评定应变天平经过动态补偿后能否满足动态试验的要求。在飞行器舱门的风洞动态试验中,要求测量舱门在连续打开过程中各攻角下所受的动态力和力矩。实际实验中,舱门从5°~90°连续打开用时时间最短为12.5ms,最长为5 s。
采用基于测量噪声的传感器动态补偿后理想指标确定方法,确定杆式应变天平经动态补偿后理想指标,并确定其是否满足舱门风洞动态试验的要求,即确定杆式应变天平是否适用于舱门风洞动态试验。若不适用,就要采用其它形式的多维力传感器。
以应变天平Fx通道为例。Fx通道测量舱门Fx方向打开过程中所受的动态力,在舱门静态校准实验中舱门从5°~90°打开过程中,各角度下Fx方向信号大小如图12所示。由于舱门自身重力的原因,打开过程中Fx方向信号有一个斜坡趋势。因此,构造一个斜坡信号作为舱门打开过程中作用在天平上的激励信号,斜坡信号跳变的时间即为舱门打开时间,如图13所示。因舱门打开时间短时,测量条件更苛刻,故只考虑舱门打开用时12.5ms时情况。
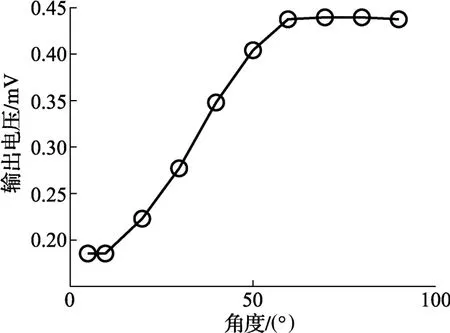
图12 各角度下Fx方向信号
对该斜坡信号作快速傅里叶变换。将斜坡信号各频率下幅值相加求得斜坡信号总能量,并求得占斜坡信号95%能量的频率带宽值为43.6 Hz。而φ10mm杆式应变天平Fx通道基于测量噪声确定的补偿后理想工作带宽为49.49 Hz,覆盖了该斜坡信号95%能量带宽。由此认为杆式应变天平测量此斜坡信号误差在允许范围内,即杆式应变天平适用于舱门风洞动态试验。注意,此处的95%能量带宽是根据测量精度的需要而选取的。若测量精度要求更高时,其值可以选取的更大些。
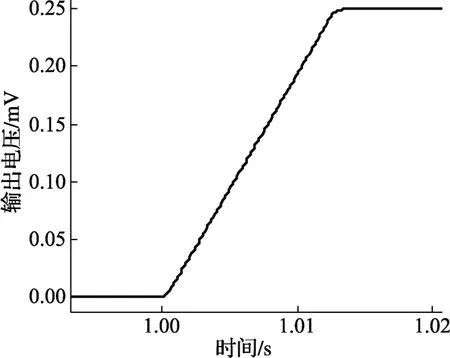
图13 斜坡信号
采用经系统辨识法动态补偿后的φ10mm杆式应变天平测量跳变时间为12.5ms斜坡信号的结果如图14所示。图中,实线为斜坡信号曲线,虚线为天平测量输出曲线。斜坡起始点至天平测量输出斜率与斜坡斜率相同的时间为4.3ms,天平测量输出与斜坡平行段的滞后时间为2.1ms,天平测量结果基本复现了该斜坡信号。这也验证了杆式应变天平动态响应速度适用于舱门风洞动态试验。
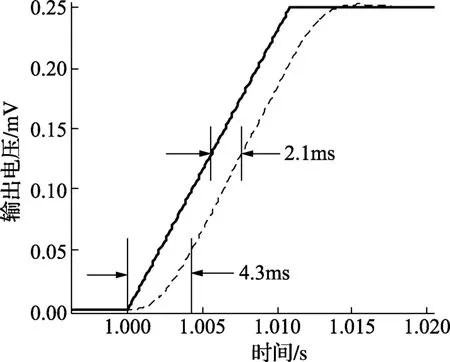
图14 跳变时间为12.5ms斜坡信号与天平测量结果
5 结束语
(1)分析测量噪声对动态补偿展宽工作带宽的影响,提出根据测量噪声确定传感器动态补偿后理想工作带宽的方法。通过预报误差法(PE)辨识出系统数学模型,将模型输出与实际系统输出的误差作为系统的测量噪声,可得到较为准确的测量噪声估计值。
(2)将基于测量噪声确定传感器动态补偿的理想指标的方法应用于杆式应变天平动态校准实验时,求得的传感器补偿后理想工作带宽49.49 Hz与通过系统辨识法补偿后带宽49.09 Hz接近,补偿后时域超调量0.048与调节时间5.2 ms也接近各自理想值0.0432与4.7ms,验证了该方法的有效性。
(3)将该方法应用于舱门风洞动态试验。采用杆式应变天平测量舱门在连续打开过程中各攻角下所受的动态力,当舱门用最短时间12.5 ms打开时,误差仍在允许范围内。故评定杆式应变天平适用于舱门风洞动态试验,能够满足舱门风洞动态试验的要求。这表明该方法可用于确定传感器动态补偿后理想指标是否满足动态试验的要求。
]
[1] 徐科军.传感器动态特性实用研究方法[M].合肥:中国科学技术大学出版社,1999,113-143.
[2] 黄俊钦.测试系统动力学[M].北京:国防工业出版社,1996,51-55.
[3] Brignell JE.Software Techniques for Sensor Compensation[J].Sensors and Actuators,1991,A25(1-3):29-35.
[4] Shi W J,Brignell J E.On-line Optimization in Sensor Frequency Response Compensation[J].Sensors and Actuators,1991,A25(1-3):37-41.
[5] 雷敏,王志中,马勤弟,等.薄膜热电偶的动态特性及动态补偿研究[J].计量学报,1999,20(3):182-183.
[6] Mehdi J,Bashir M,Al H.Application of Analog Adaptive Filters for Dynamic Sensor Compensation[J].IEEE Transactions on Instrumentation and Measurement,2005,54(1):245-251.
[7] 刘清.减小噪声干扰的热敏电阻传感器动态测量误差补偿[J].计量学报,2005,26(2):111-114.
[8] 徐科军,杨双龙,张进,等.盒式应变天平动态建模与补偿[J].计量学报,2009,30(5):434-438.
[9] Xu K J,Jia L.One-Stage Identification Algorithm and Two-step Compensation Method of Hammerstein Model with Application to Wrist Force Sensor[J].Review of Scientific Instruments,2002,73(4):1949-1955.
[10] 佘天莉,杨学山,王雷杨,等.基于DSP系统的测振传感器低频特性补偿[J].仪表技术与传感器,2010,(4):99-100.
[11] 周全,徐科军,杨双龙.杆式应变天平变负载动态建模和分段动态补偿[J].电子测量与仪器学报,2012,26(4):286-298.
[12] 徐科军,殷铭.基于FLANN的腕力传感器动态补偿方法[J].仪器仪表学报,1999,20(5):541-544.
Determ ination of Ideal Index of Dynam ic Com pensation for Sensors According to Measuring Noise
WU Yi-ping, XU Ke-jun, YANG Shuang-long
(School of Electrical and Automation Engineering,Hefei University of Technology,Hefei,Anhui230009,China;)
As themeasuring noise is the main factor that affects the dynamic compensation effect of sensor,and the ideal compensation effect of sensor within noisy environment is studied.The method to determine the ideal frequency bandwidth of the sensor after dynamic compensation according tomeasurement noise is proposed,aswell as themethod to determine the ideal value of time-domain performance index including adjusting time and overshoot through the ideal frequency bandwidth.The proposedmethod is applied to the dynamic calibration experimentof the strain gauge balance,its effectiveness is verified.Finally,the method is used to assess that the strain gauge balance after dynamic compensation could meet the requirements of the wind tunnel test of the aircraft.That shows the method could be used to determine whether the sensor after dynamic compensation is suitable for the dynamic test.
Metrology;Measurement noise;Dynamic compensation;Strain gauge balance
TB93
:A
:1000-1158(2015)03-0273-06
10.3969/j.issn.1000-1158.2015.03.11
2013-07-16;
:2013-09-13
吴义平(1989-),男,江西永丰人,合肥工业大学硕士研究生,主要从事嵌入式系统及其应用方向研究。徐科军为本文通信作者。
猜你喜欢
金桥(2022年7期)2022-07-22
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
汽车观察(2021年11期)2021-04-24
中学生百科·大语文(2021年2期)2021-03-08
花火彩版A(2021年11期)2021-02-08
民用飞机设计与研究(2020年4期)2021-01-21
中学生数理化·八年级物理人教版(2020年12期)2021-01-18
机械工程师(2020年5期)2020-06-19
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年4期)2019-05-21