
基于智能钻井的二维井眼轨道设计及修正方法
2015-08-04 09:54刘维凯毕雪亮徐海粟于晓文
石油矿场机械 2015年10期
刘维凯,闫 铁,毕雪亮,徐海粟,张 楠,于晓文
基于智能钻井的二维井眼轨道设计及修正方法
刘维凯a,闫铁a,毕雪亮a,徐海粟b,张楠a,于晓文a
(东北石油大学a.油气钻井技术国家工程实验室;b.提高油气采收率教育部重点实验室,黑龙江大庆163318)①
完全智能钻井系统是未来定向钻井技术的发展方向,其井下系统可以智能识别储层情况,在地面预测出现较大误差时,能够自动设计相应的井眼轨道完成精确中靶的施工目标。在能够获取实际地质信息的前提下,对于存在埋深误差的大面积储层,设计了二维智能井眼轨道。设计的轨道修正闭环控制系统,能有效控制井眼轨迹与设计轨道的符合率。提出的二维井眼轨道模型能够充分反映出智能钻井的技术特点和需求,并具有通用性,可广泛应用于斜直井、定向井、水平井的轨道设计、监测及修正设计,这种新的数学模型和设计方法为智能钻井技术的推广和应用奠定了基础。
智能钻井;二维轨道设计;二维轨道修正
1 完全智能钻井系统
1.1基本组成
完全智能钻井系统由地面监控系统、井下数据处理与轨道设计系统、井下测量与测控系统、双向通讯系统、偏置执行机构5部分组成[1-2],如图1所示。相比于旋转导向钻井系统,完全智能钻井系统应该具有高速高效的双向通讯系统、能探测储层及钻具信息的随钻井下测量系统、能对测量数据进行处理并作出决策的井下数据处理与轨道设计系统、能够将井下信息实时可视化反映到监控屏和可干预井下智能钻井系统的地面监控系统、能钻出平滑井眼精确改变钻具造斜能力的偏置执行机构。地面监控系统不断将井深参数传入井下数据处理与轨道设计系统,井下数据处理与轨道设计系统处理井下测量系统传来的数据并结合井深参数,在预测出现较大误差时,智能设计井眼轨道。在钻井过程中,井下测量与测控系统中的工具测控系统不断将实钻轨道与设计轨道进行对比,通过偏置执行机构纠正偏差。

图1 完全智能钻井系统基本组成
1.2完全智能钻井系统特点
20世纪80年代中期以后,国际石油钻井中使用随钻测量、随钻测井、随钻地震、随钻地层评价、钻井动态信息实时采集处理、地质导向和井下旋转导向闭环钻井等先进技术以来,钻井技术发生了质的变化,其变化特征为[3-7]:
1)钻井信息数字化。在钻井过程中,井下地质参数、钻井参数、流体参数和导向工具位置及状态的实时测试、传输、分析、执行、反馈和修正,以及钻井信息向完全数字化方向发展,越来越脱离人们的经验影响和控制,钻井过程逐步成为可用数字描述的确定性过程。
2)工具和作业智能化、集成化。当前的导向钻具、测试工具和作业控制都日趋智能化。一项由国际数家公司组成,1990年开始,历时5 a,耗资950万美元开发的集成钻井系统(IDS)和集成钻井作业系统(IDO)获得成功,也是钻井系统及操作智能化的体现。而近年地面自动控制的导向钻井工具和随钻地层评价测试系统(FEMWD)开发成功,更体现了工具和作业智能化趋势。
完全智能钻井系统特点为:
1)可以知道钻头所在位置,智能识别储层实际情况。
2)可以连续完成钻井任务,而旋转钻井系统需要人为干预。
3)当地面预测存在较大误差时,可以智能设计相应轨道保证中靶。
4)对于一些特殊储层,可以智能设计相应靶区轨道,实现高效开发。
2 二维智能着陆井眼轨道设计
适用于面积大且产状规则、油气层性质稳定、埋藏深度预测存在一定误差的油气藏。
2.1安全圆柱与靶区设计
为防止实际井眼轨迹与设计井眼轨道偏差过大而导致脱靶,设计了安全圆柱与靶区,一旦井眼轨迹穿出这一范围就重新设计井眼轨道,如图2所示。

图2 二维井眼轨道安全圆柱与靶区
安全圆柱是以设计着陆井眼轨道O′Pt1为轴线、r为半径的圆柱体。靶区的设计遵循行业技术规范,以L为靶区长度,h为靶区高度,w为靶区宽度。
由图2可以看出:由于不需要进行扭方位,所以为二维井眼轨道,在水平投影面上可以看出井眼轨道的投影表现为1条直线,P为当前钻头所在位置,Pt1为着陆部分,t1为入靶点,t2为设计终止点。
2.2入靶井斜角的计算
通常地层是倾斜的,可以用地层倾角来表示其倾斜程度,用下倾方位来表示其倾斜方向。为了有效开发储层,水平井段应始终保持在储层中。虽然深度预测出现误差,但储层面积大,产状规则,油层性质稳定,不讲究严格的入靶方位,可按原设计方位进行二维着陆[8],若原设计方位角为Φ,入靶点处储层的下倾方位角为Ψ,储层的地层倾角为β,如图3所示。
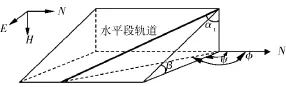
图3 储层产状参数
则入靶井斜角为

2.3计算井眼轨道参数
2.3.1判断是否需要更换钻具
设P为当前井底,t为入靶点,已知P点处空间坐标(NP,EP,DP),井斜角αP,方位角Φ;t点处空间坐标(Nt,Et,Dt),井斜角αt,方位角Φ。以Pa作为稳斜调整段,at为圆弧段,计算圆弧段曲率半径来判断是否需要更换钻具,如图4所示。

图4 稳-增入靶垂直剖面
图中几何关系满足

消去LPa项,得

将井下钻具最大造斜率对应的曲率半径Rmin与R0进行比较。当Rmin<R0时,设计稳-增-稳-增轨道;当Rmin≥R0时,造斜力不足,需要更换更大造斜能力的井下钻具。
2.3.2计算相关参数
若Rmin<R0,先以Pa作为稳斜调整段,再通过ab段造斜到αQ,续以bQ为稳斜段,一旦发现油气显示立即增斜到αt,由靶点t进入储层中部,如图5所示。
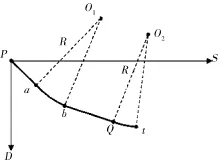
图5 二维着陆井眼轨道垂直剖面
欲准确进入储层中部,需满足以下关系式,即

式中:δ为入靶点处储层厚度,m;α为各点井斜角,(°);R为造斜率对应的曲率半径,m。
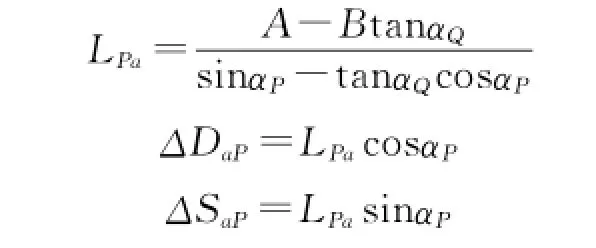
1)Pa段。

整理,得

分离LPa,得
2)ab段。
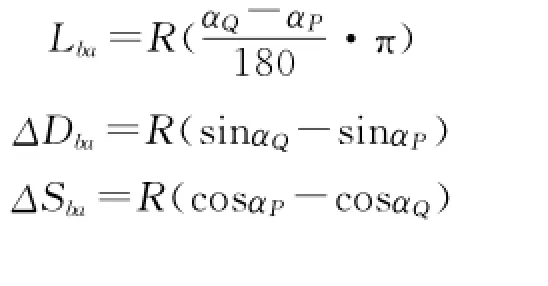
3)Qt段
4)bQ段。
空间坐标变化

设计结果如表1所示。

表1 二维着陆井眼轨道设计结果
2.4轨道姿态的自动调整
已知最近两测点井深L1、L2,井斜角α1、α2,方位Φ1、Φ2,则可计算当前钻具的变井斜能力和变方位能力Kα、KΦ为
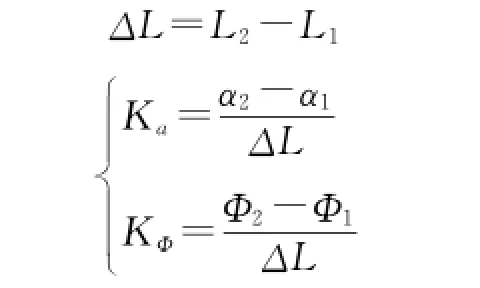
将Kα、KΦ与该井段设定值Kαx、KΦx比较,作差得到ΔKα、ΔKΦ,由控制器计算所需侧向力的大小和方向并下令给偏置执行机构;偏置执行机构改变钻具受力情况后,再次测量Kα、KΦ并与该井段设定值Kαx、KΦx比较,不断修正至满足精度要求。其闭环控制系统如图6所示。
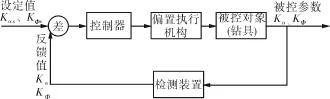
图6 轨道修正闭环控制系统
3 结论
1)完全智能钻井系统是未来水平井钻井技术发展的方向,提出的二维井眼轨道模型能够充分反映出智能钻井的技术特点和需求,并具有通用性,可广泛应用于斜直井、定向井、水平井的轨道设计、监测及修正设计。这种新的数学模型和设计方法为智能钻井技术的推广和应用奠定了基础。
2)文中的计算公式在数学上都是精确解,适用于设计由直线段和圆弧段所组成的各种井身剖面,通过轨道修正闭环控制系统,可获得较好的井身质量。
[1]张绍槐.智能油井管在石油勘探开发中的应用与发展前景[J].石油钻探技术,2004,32(4):1-4.
[2]王以法.人工智能钻井实时专家控制系统研究[J].石油学报,2001,22(2):83-86.
[3]刘清友.未来智能钻井系统[J].智能系统学报,2009,4 (1):16-20.
[4]岳登进,冯明.过去10年国外钻井技术的重要进步[J].钻采工艺,2001,24(4):5-7.
[5]石崇东,张绍槐.智能钻柱设计方案及其应用[J].石油钻探技术,2004,32(6):7-10.
[6]石崇东,李琪,张绍槐.智能油田和智能钻采技术的应用与发展[J].石油钻采工艺,2005,27(3):1-4.
[7]祝效华,刘清友,李红岩,等.井眼轨迹预测理论及方法研究[J].天然气工业,2004,24(4):38-40.
[8]刘修善.井眼轨道几何学[M].北京:石油工业出版社,2006.
(2011ZX05036-002)
Research on Three dimensional Welborel Trajectory Design and Correction Method Based on Intelligent Drilling
LIUWeikaia,YAN Tiea,BI Xuelianga,XUHaisub,ZHANG Nana,YU Xiaowena
(a.National Engineering Laboratory of Oil and Gas Drilling Technology;b.Key Laboratory of Enhanced Oil Recovery of the Ministry of Education,Northeast Petroleum University,Daqing 163318,China)
Fully intelligent drilling system is the future development direction of the directional drilling technology its underground system can intelligently identify the reservoir conditions. When the ground prediction error is large,fully intelligent drilling system can be used to automatically design the corresponding trajectory to complete the accurate construction target.Under the premise of obtaining the actual geological information,two-dimensional intelligent trajectory is designed for the existence of large area reservoir with depth error.In the process of drilling,the trajectory correction closed-loop control system is designed to effectively control the coincidence rate between the actual drilling wellbore trajectory and the designed wellbore trajectory.The proposed two-dimensional wellbore trajectory model can fully reflect the characteristics and requirements of intelligent drilling technology and can be widely used in the slant well,directional well,horizontal well trajectory design,and monitoring and correction design,making it more versatile.This new mathematical model and design method also laid the foundation for the promotion and application of intelligent drilling technology.
intelligent drilling;two-dimensional trajectory design;two-dimensional trajectory correction
TE928
A
10.3969/j.issn.1001-3482.2015.10.011
1001-3482(2015)10-0046-04
①2015-04-08
黑龙江省教育厅科学技术研究项目“基于完全智能钻井系统的井下井眼轨道的智能设计及修正理论研究”
(L13H-Q13038)
刘维凯(1974-),男,黑龙江龙江人,讲师,博士,主要从事油气井工艺理论与技术研究,E-mail:lwkzdd@sina.com。
①2015-04-12
国家科技重大专项“大型油气田及煤层气开发”子课题“煤层气水平井、多分支水平井钻井技术研究”
陈智(1975-),男,湖北武汉人,高级工程师,硕士,主要从事石油机械研究与应用工作,E-mail:1499730069@qq.com。
猜你喜欢
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年5期)2021-12-02
矿产勘查(2020年5期)2020-12-25
石油钻探技术(2020年4期)2020-10-09
国际放射医学核医学杂志(2020年4期)2020-07-27
石油钻探技术(2020年1期)2020-02-21
凿岩机械气动工具(2016年1期)2016-11-11
化工设计通讯(2016年7期)2016-03-12
西南军医(2016年2期)2016-01-23
天然气勘探与开发(2015年3期)2015-12-08
