土下果实收获机械自动限深装置研制与试验
2015-07-31 13:20游兆延胡志超吴惠昌等
江苏农业科学 2015年3期
游兆延 胡志超 吴惠昌等


摘要:为了提高土下果实收获时的挖掘效果,降低驾驶员劳动强度,设计了基于超声波测距的自动限深系统,包括地面仿形装置设计、关键器件的选择、控制算法的设计、液压设计、A/D采样以及程序编写等,检测了超声波传感器的性能,将整套系统嫁接在花生联合收获机上,用传感器两端的电压响应曲线来反映耕深变化,并进行了限深收获试验。结果表明:手动收获萝卜平均挖掘深度12.50 mm,伤果率5.71%,漏挖率2.82%;改为自动限深方式收获后,平均挖掘深度12.30 mm,伤果率3.40%,漏挖率1.10%。手动收获甘薯平均挖掘深度15.30 mm,伤果率3.00%,漏挖率138%;改为自动限深方式收获后,平均挖掘深度14.8 mm,伤果率1.95%,漏挖率1.08%。
关键词:土下果实,超声波测距,自动限深
中图分类号: S225 文献标志码: A
文章编号:1002-1302(2015)03-0354-04
土下果实作物种类繁多,主要有马铃薯、花生、甘薯、甜菜、大蒜、洋葱、胡萝卜、生姜等20余种。近年来,在消费结构、出口结构不断调整优化的双重拉动下,我国土下果实作物种植面积达数亿亩,年产值达数千亿元[1-4]。目前,我国土下果实生产机械化水平不仅低于发达国家,与稻麦等主要粮食作物机械化水平相比亦有较大差距。土下果实收获机械在减轻劳动强度、降低收获损失、提高生产率方面发挥着重要作用,在实际挖掘收获中,机具手须时刻注意当前挖掘情况,工作强度大,无法实现精确控制,存在挖破、漏挖、破坏土质等问题,有效降低机手的工作强度十分重要。国外限深方式多采用电液压式,如德国Grimme农机公司设计了由转向油压缸、液压泵、比例换向阀、转向控制器(ECU)组成的马铃薯收获机,此装置适用于大农场收获。加拿大萨斯彻温大学控制工程系研制出1种超声波深度控制系统,由安装在农具机架上部的3个高频超声波传感器测量并提供平均作业深度信号,每个传感器将超声波直接发射到地面,并检测出其反射的脉冲。江苏宇成动力集团有限公司研制开发的大蒜联合收获机的限深系统由限深指示板、液压调节机构等组成。河南省开封市茂盛公司生产的花生联合收获机的限深装置通过调节螺杆与限深轮安装支架相连,调整范围为150 mm,保证了挖掘深度的一致性。华南农业大学罗锡文教授领导的团队以东方红X-804拖拉机为研究对象,开发了电控液压转向系统、作业机具升降控制系统,实现了拖拉机自动转向操纵控制以及作业机具自动升降控制[5]。本研究设计了基于超声波测距的自动限深系统,整套装置搭载于4HLB-2型花生联合收获机上,田间试验检测系统响应性能、收获性能,实现了土下果实挖掘深度的自动控制。
1 自动限深工作原理
地面作业环境比较复杂,以超声波测距传感器作为检测工具时,声波在传播过程中如果遇到直径小于超声波半个波长的障碍物,声波会绕过障碍物继续传播,即产生绕射现象[6]。为解决此问题,可以通过测量超声波传感器发射端距离地面仿形装置的距离,间接得到地面起伏的变化,将测得的深度变化值与控制器设定的变化深度进行比较,由控制器发出控制信号至电磁阀,由电磁阀控制油缸进行动作,循环反馈完成控制任务,具体原理见图1。
2 主要部件设计及参数确定
2.1 非刚性接触仿形装置设计
仿形装置由地轮、导向管a、导向管b、焊接板、压簧、长螺杆、测量基准板等组成(图2)。压簧嵌套在长螺杆上,始终运动于2个导向管之间;导向管b随着地面的起伏在导向管a内上下滑动,活动距离为335 cm;导向管a与导向管b之间连接有六角头螺栓,限制了导向管b绕长螺杆轴线方向转动的自由度,起到导向作用;超声波传感器安装在超声波测量基准板上方,通过测量超声波传感器距离测量基准板的距离变化可以观察机具作业深度的变化。
2.2 超声波测距传感器
超声波测距传感器(深圳科利奥公司)型号为LM-200-010-DAC,安装在测量基准板上方,工作电压24 V,测量范围为200~1 000 mm,盲区200 mm,频率200 kHz,工作温度-35~70 ℃,外壳材料ABS,通过发射超声波信号与反馈信号的时间差得到距离信号,以无线通信的方式传输距离信息[7-8]。笔者对超声波测距模块进行了实际测量试验。选用的超声波传感器连接方式为:棕线:电源正24 V;黑线:电源负;白线:大地;蓝线(输出线):0~10 V,电源由美国Extech公司直流电源提供输入,在示波器(美国Fluke公司)里观察输出特性,在1 m范围内测量9组数据(表1),将测量距离与实际距离进行比较,分别求出其相对误差、绝对误差。
3 田间试验
2014年1月24日在江苏省农业科学院试验田进行试验,检测其自动限深响应性能,选用304拖拉机后悬挂 4QL-1 甘薯起垄机[10],在试验田起垄,长20 m,垄高 250 mm,垄宽600 mm。在垄上选取长度为12 m的样本,在起好的垄上修1条高低起伏的地面,模拟花生收获时垄底地面高低起伏的变化。
3.1 示波器跟踪结果
用示波器响应的电压曲线跟踪地面高度的变化曲线,将示波器的两端连接在超声波传感器上,收获速度达0.33 m/s时,分别以不加入控制程序、加入控制程序通过取样地面,测量超声波传感器电压的变化情况(图6),观察机器的灵敏度、延时性。从示波器中可以看出,不用自动限深时,起伏变化较大,用自动限深控制,最大延时小于0.4 s,超调量小于10%,观察发现其电压范围围绕在某值附近,保证挖掘深度基本一致,提高了挖掘效果。当行驶速度达0.66 m/s时,带自动控制时,示波器如图7所示,系统滞后时间超过0.5 s,超调量大于15%,限深效果降低。
3.2 机器抗振性能检测试验
选用丹麦B&K2513测振仪记录地面仿形装置在田间的振动情况(图8),人工限深时,收获机行驶速度为 0.33 m/s,噪声为162 dB,RMS(均方根)值为13 km/s2;收获速度为0.66 m/s,噪声为173 dB,RMS值为17 km/s2。自动限深时,收获机行驶速度为0.33 m/s,噪声为149 dB,RMS值为3 mm/s;收获速度为0.66 m/s时,噪声为161 dB,RMS值为11 km/s2[11]。振动测量结果验证了示波器电压曲线的变化情况。endprint
3.3 田间收获试验
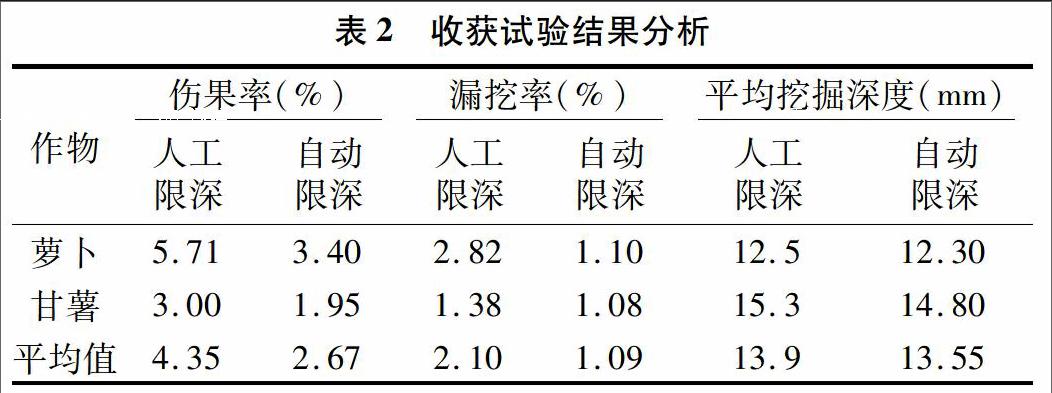
分别用自动限深、人工手动收获萝卜、甘薯进行挖掘试验,比较收获伤果率、漏挖率等收获参数。手动收获萝卜平均挖掘深度12.50 mm,伤果率5.71%,漏挖率2.82%;改为自动限深方式收获后,平均挖掘深度12.30 mm,伤果率340%,漏挖率1.10%。手动收获甘薯平均挖掘深度 15.30 mm,伤果率3.00%,漏挖率1.38%;改为自动限深方式收获后平均挖掘深度14.80 mm,伤果率1.95%,漏挖率108%(表2)。
4 结论
本系统为获得最佳的挖掘收获效果,在提高各执行装置动作的顺畅性、适应性、灵敏性等方面有待改进。对于限深装置而言,其作用是实时检测收获机械的挖掘深度。因此,有必要深入研究其静特性,包括传感器的线性度、灵敏度、滞环、重复性等参数;动特性中的振动分析、抗干扰分析等。超声波传感器从接受到信号到液压缸开始动作,控制器的延时很短,电磁阀动作时间约60 ms,设计的液压缸行程范围为350 mm,缸径40 mm,流量最大为120 L/min,以最大的活动范围来计算[12],液压缸动作时间为0.21 s,收获机正常行驶速度为 0.8 m/s,从开始检测到信号到油缸完成动作,收获机行走的路程为0.224 m。传感器开始检测到液压缸执行动作大约有0.28 s的延时,应考虑将限深装置前移,另外设计的限深装置结构相对复杂,可以考虑换成角度传感器,设计旋转铰接加弹簧的机械结构会更简单。受试验条件所限,本试验并不能完全模拟实际作业时的一些干扰,包括振动、噪声等。因此,参数自适应模糊-PID 控制器的模糊控制规则还须进一步优化调整。
参考文献:
[1]胡志超,彭宝良,尹文庆,等. 多功能根茎类作物联合收获机设计与试验[J]. 农业机械学报,2008,39(8):58-61.
[2]彭宝良,吕小莲,王海鸥,等. 半喂入自走式大蒜联合收获机[J]. 农业机械学报,2011,42(增刊1):138-141,146.
[3]胡志超,王海鸥,王建楠,等. 4HLB-2型半喂入花生联合收获机试验[J]. 农业机械学报,2010,41(4):79-84.
[4]游兆延,吴 努,胡志超,等. 土下果实收获挖掘自动限深系统设计[J]. 中国农机化学报,2013,34(3):184-187,191.
[5]罗锡文,张智刚,赵祚喜,等. 东方红X-804拖拉机的DGPS自动导航控制系统[J]. 农业工程学报,2009,25(11):139-145.
[6]游兆延,胡志超,吴 努,等. 基于NEC单片机田间超声波测距的应用[J]. 电子设计工程,2014,22(6):137-140.
[7]李 震,卢加纳,洪添胜,等. 山地果园钢丝绳牵引货运机超声波避障系统[J]. 农业机械学报,2011,42(10):116-120.
[8]韩 霜.Fluke 190 SeriesⅡ便携式四通道示波表具备更高性能和安全等级[J]. 世界电子元器件,2011(3):60.
[9]吴惠昌,胡志超,彭宝良,等. 牵引式甜菜联合收获机自动对行系统研制[J]. 农业工程学报,2013,29(12):17-24.
[10]计福来,王 冰,胡良龙,等. 4QL-1型甘薯起垄收获多功能机的设计与试验[J]. 中国农机化,2012(4):94-97.
[11]何 勇,金伟良,宋志刚. 多跨人行桥振动均方根加速度响应谱法[J]. 浙江大学学报:工学版,2008,42(1):48-53.
[12]赵克强. 液压缸动作时间的计算[J]. 液压与气动,1981(1):22-24.endprint