输电线路清障装置机械结构设计
2015-07-29 07:07欧发斌廖伟宁何邦权张国永
现代商贸工业 2015年14期
欧发斌 廖伟宁 何邦权 张国永
摘 要:以输电线路巡线清障装置为研究对象,采用了线上双轮支撑同侧结构设计,以人工可操控的圆形锯盘清理障碍物。给出了该装置在驱动机构和清障机构方面的硬件设计概况,并给出了清障车驱动机构电路结构和辅助轮驱动驱动电路,以及电机选型等细节。研究结论可为类似装置的设计提供参考。
关键词:输电线路;清障装置;结构设计
中图分类号:TB 文献标识码:A 文章编号:1672-3198(2015)14-0210-02
1 概述
输电线路巡线机器人是当前输电线路运行维护中的重要工具,同时智能化巡线机器人也是一个非常复杂的问题,涉及到多个领域,如机械结构设计、传感器设计、控制系统设计等多个方面,国内在这方面的研究还处于起步阶段。国外在上世纪80年代就已经开始这个方面的研究,如东京电力公司的Sawada等人研制了光纤复合架空地线巡检移动机器人,美国TRC公司研制的悬臂自治巡检机器人的样机系统,加拿大魁北克水电研究院的研究人员开发的HQ Line Rover遥控小车等。国内在这个方面的研究起步要晚得多,水平也相对落后。武汉大学研制的“220kV单分裂相线巡线机器人”、中国科学院沈阳自动化研究所研制的“500kV地线巡检机器人”、中科院自动化所研制的“110kV输电线路巡检机器人”等的样机在地面已经取得了成功,但在自主跨越障碍等方面仍然存在困难,这也是当前巡线机器人方面的主要困难之一。因此本文从实用的角度出发,设计一种具有线上行走功能,以地面遥控操作为主的巡线清障车装置,用于输电线路巡线清障需要。限于篇幅,本文中仅对该巡线清障车装置的机械结构方面的设计展开探讨。
2 设计任务
本文中研究的巡线清障车装置适用于输电线路档距中间漂浮异物带电消除,将清障车挂于导线上通过地面远程遥控装置对该装置进行操控,代替线路运行人员对导线异物进行带电消除,并对探视图像进行分析和判断,及时对线路进行探伤并完成异物消除工作,成果的实施可解决输电线路档距中间漂浮异物无法带电消除的问题,大幅提高线路清障的效率,全面提高线路的可靠性和安全稳定性。
由上述设计任务可见,其主要实施途径包括三个主要方面,一是清障车的线上行走能力,二是图像实时采集和传输能力,三是对输电线路档距中间漂浮异物的清理能力。由于本文主要讨论的是机械结构方面,因此主要探讨满足清障车线上行走能力和对输电线路档距中间漂浮异物的清理能力两个方面的机械结构设计。
3 清障车驱动机构设计
3.1 驱动机构设计要求
清障车驱动结构方面的设计要求主要包括以下几个方面:(1)从实用的角度要求机构小巧、紧凑、轻质,便于携带及上下线操作;在故障情况下,防止除异物清障车摔落。(2)从运动控制的角度要求机构的自由度尽量少,能实现解耦控制,并且具有符合要求的控制精度。(3)具有三个速度等级和前进、后退两个方向功能,线上清障车采用双轮支撑同侧结构设计,使得上线更为容易,同时配合大摩擦系数的行走轮及大转矩电机,使车体具备一定的爬坡和制动能力。(4)在输电线路带电运行情况下对输电线路进行检测,抗电磁干扰能力强、传输距离远。(5)设备体积小、重量轻、结构设计紧凑、功能齐全、操作方便、安全可靠,特别适应于除异物应用。
在上述各设计要求中,重点是两个方面,一是驱动机构,二是抗干扰机构。前者主要是满足在巡线装置的在线上各种活动需要,后者则是考虑在遥控条件下,装置本身的低压直流电源容易受到高压输电线路干扰,可能造成误操作。现分别对上述两个方面做相应设计。
3.2 驱动机构设计
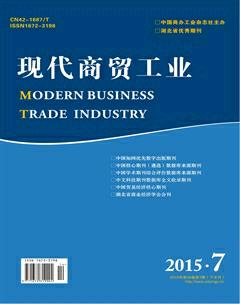
在本装置的驱动机构方面,由于是采用双轮支撑同侧结构设计,故将其中一轮作为主动轮,另一轮为辅助轮。对于主动轮的控制采用三级速度控制,而对于辅助轮则只需具备启停功能。对于主动轮,采用电机驱动芯片和无刷直流电机组成主动轮的驱动执行系统,对于辅助轮,则采用继电器加直流低速电机组成的驱动执行系统。主动轮和辅助轮在控制上的原理相同,如图1所示。
上述各类机构中,主动轮的电机是关键环节之一,为了满足设计要求,主动轮驱动器采用东菱电机公司生产无刷直流电机D120TYD-D CR 60M-30WG,该电机功率4W-900W。主动轮功率驱动器采用国际整流器公司的IR2130专用芯片,具有完善的自我保护功能、抗干扰能力强等特点。在主动轮控制方面,采用双闭环控制的控制策略对主动轮的无刷直流电机进行控制。
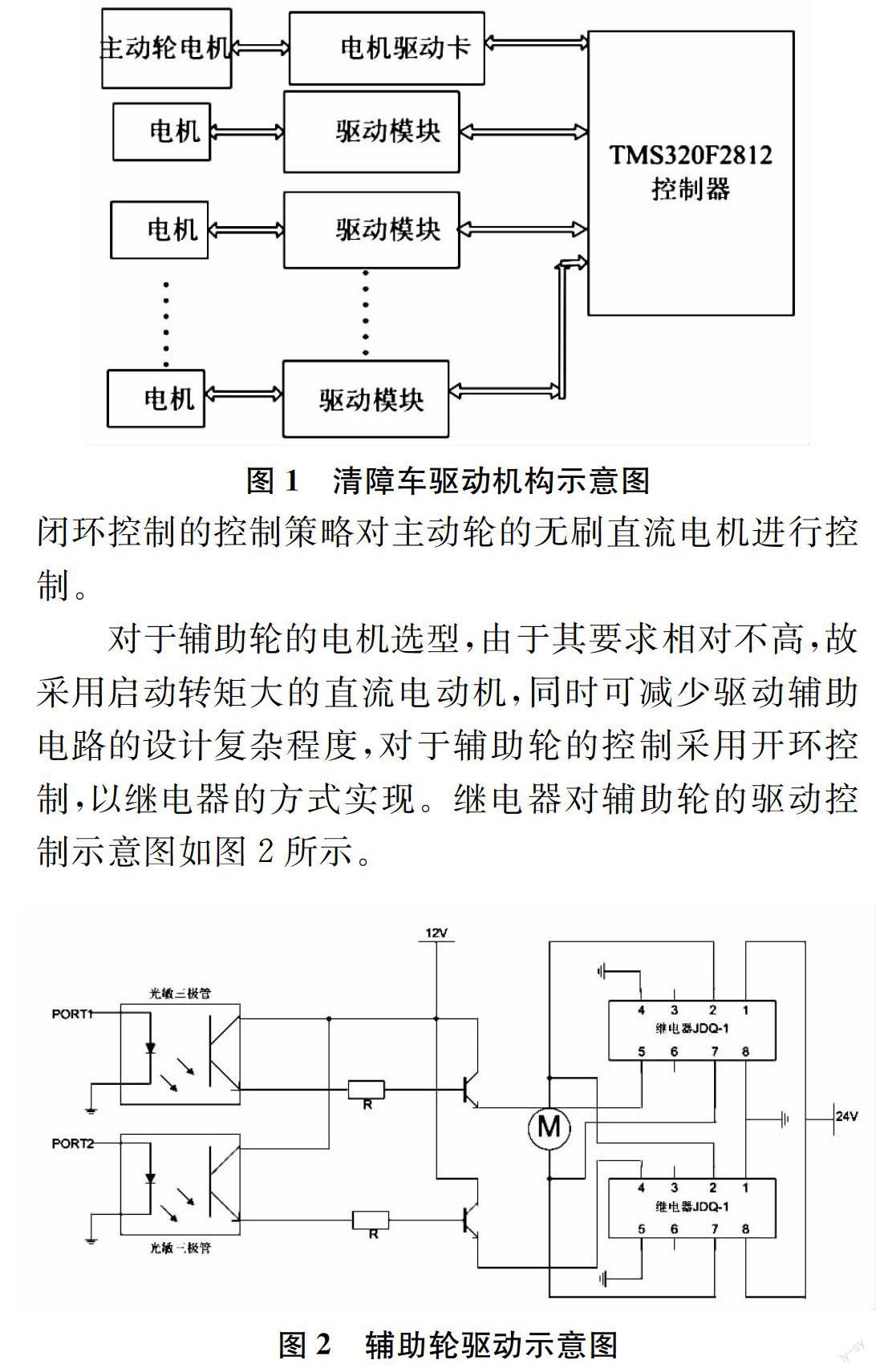
对于辅助轮的电机选型,由于其要求相对不高,故采用启动转矩大的直流电动机,同时可减少驱动辅助电路的设计复杂程度,对于辅助轮的控制采用开环控制,以继电器的方式实现。继电器对辅助轮的驱动控制示意图如图2所示。
在电源方面,为了满足大功率和稳定性的要求,采用聚合物锂电池组作为供电电源。为了避免干扰,在设计电源供电模块时,采用分别在用户板上设计电源供电模块的方式,避免集中供电带来的干扰。
减速箱选型方面,考虑电机的输出额定转矩,电机的额定功率、额定转速、减速比等因素,根据机械结构上的涡轮涡杆和各个关节不同的负载需求,计算得到需要的电机和相配的不同的减速齿轮箱,限于篇幅在此不再赘述。
4 清障机构设计
根据设计要求,本文中设计的清障装置为采取高速直流电机带动圆锯片,利用高速转动将异物打碎,同时增加锯齿功能,扩大使用范围,采用远程遥控控制方 式,对装置在导线上进行的前进、后退、切割等操作进行控制,满足操作的微小服务要求,设计采用电子调速模块控制,实现对小型圆盘锯的控制。
在圆形锯盘的电机驱动方面,由于需要清理的障碍物可能具有多种类型,因此圆形锯盘应具有很好的调速特性和宽广的调速范围,在这种情况下,采用直流电机是较好的选择。本设计中以直流电机驱动圆形锯盘,选择型号的maxon RE36石墨電刷直流电机,齿轮箱减速比33∶1,从而为圆形锯盘的转速操控等留下足够的操作空间。在驱动电路方面,圆形锯盘的驱动电路采用H桥方式,H桥器件选用LMD1 8200芯片。该芯片是专用于直流电机驱动的高性能芯片,具有CMOS控制电路和DMOS功率器件。通过借助主处理器、增量型编码器等设备,可形成专用于圆形锯盘控制的电子调速模块,为圆形锯盘的操控提供足够的操作精度支撑,满足操作的微小服务要求。
5 结语
输电线路巡线清障装置是当前输电线路维护中的重要工具,也是研究热点。由于具有高度智能化的巡线清障机器人的研制面临实用性方面的困难,本文中设计了以人工操控为主的线上遥控清障装置,可满足线上行走和清障需求。该装置可满足当前的清障需求,但作为未来的研究方向,还应进一步研究机器人的自主跨越障碍方面的研究,这要求进一步改进机器的行走机构,使之具备一定的跨越障碍方面的自主能力,这也是当前巡线机器人研究的热点。作者将在当前研究基础上,未来将进一步改进其行走轮设计,提高机器的智能化水平。
参考文献
[1]Robot repair and examine live lines in sever condition[J].Electrical World,1989,(5):71-72.
[2]吴功平,肖晓辉,肖华,等.架空高压输电线路巡线机器人样机研制[J].电力系统自动化,2006,30(13):90-93,107.
[3]王鲁单,王洪光.一种输电线路巡检机器人控制系统的设计与实现[J].机器人,2007,29(1):7-11.
[4]周风余,吴爱国,李贻斌.110kV输电线路巡线机器人控制方法及实现[J].山东大学学报,2007,37(6):31-35.
猜你喜欢
建材发展导向(2023年6期)2023-03-31
房地产导刊(2022年5期)2022-06-01
建材发展导向(2021年13期)2021-07-28
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16