
一种基于频域的相位差无源标签测距方法*
2015-07-25 09:21胡宏泽
数据采集与处理 2015年3期
胡宏泽 章 勇 贾 虹,2
(1.南京航空航天大学计算机科学与技术学院,南京,210016;2.总参第六十研究所,南京,210016)
引 言
射频识别(Radio frequency identification,RFID)技术是一种通过无线射频方式进行非接触式的双向数据的通信,对目标进行识别和读写相关数据的自动识别技术。随着物联网的快速发展,RFID技术凭借非接触、非视距、时延短、高精度以及成本低等优点在室内定位系统中得到了广泛的应用[1]。由于有源标签需要携带电池成本相对较高的特点,基于超高频段的无源标签的定位系统的研究有着更加深远的意义。
1 基于频域的信号到达相位差的双频比相法测距方案
1.1 信号到达相位差双频比相法测距原理
假设在排除多径效应,噪声等因素影响的理想的自然环境下,读写器向标签发送的频率为f0载波信号为

式中:A为该载波信号的振幅,φ0为发送载波信号的初始相位。经过标签反向散射返回至读写器接收到的信号为

式中:α为返回载波信号的增益,β为标签的调制因子,Δφ为载波信号在整个传播过程中产生的相位差,并且该相位差包含了标签与读写器之间的距离信息



由式(4,5)可知二次相位差 Δ2φ为

其中Δf=f2-f1,由式(6)可得基于二次相位差的测距公式为

分析式(7)可知,当Δf取值很小时,可大大增加最大不模糊距离。当Δf取值为10MHz时,最大不模糊距离可达到15m,针对UHF RFID系统通信距离最大一般达到10m左右的特点,该方案完全可以满足目前UHF RFID定位系统对于无源标签测距的要求。
1.2 基于频域的相位差的双频比相法测距算法

1.2.1 相位误差分析以及频率差Δf
根据图1所示,在自由传播环境中,读写器接收到标签返回信号的相位信息可以表示为

式中:Δφprop是电磁波在空间传播的相位累积,Δφ0是读写器的调制解调模块到天线的线缆的传播相位累计,ΔφBS是标签反向散射调制对载波相位的产生的偏移。相位Δφ0表示了读写器的调制解调模块到天线之间的线缆的距离,考虑到相位Δφ0带来的距离可以直接测得,因此,由标签返回信号的可测得的相位误差主要来源于ΔφBS。
文献[11,13]中给出了ΔφBS的估算公式,标签的等效电路如图2所示。
当发送频率为f0的载波进行测试时,ΔφBS为

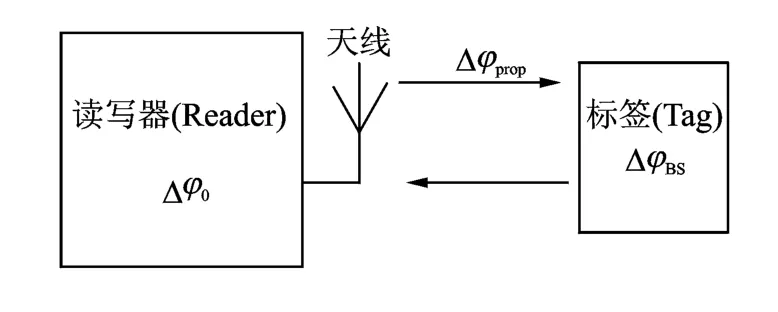
图1 载波信号传播模型Fig.1 Propagation model of carrier signal
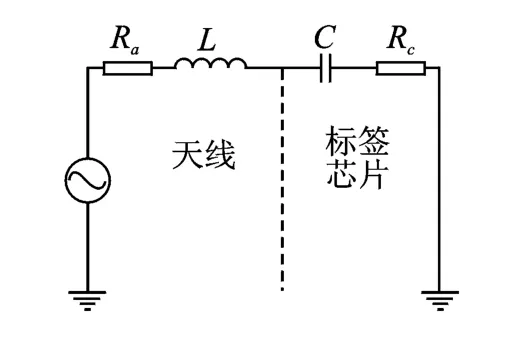
图2 标签等效电路 Fig.2 Equivalent circuit of tags

由于噪声等非理想因素造成的相位误差无法避免,假设对频点fi测量值造成的相位偏差为ui,ui~N(0,δ2),对于不同测试频点fi和fj所带来的相位偏差ui和uj相互独立,并且ui与变量fi无关,则可定义对于该样本空间最优拟合直线的回归模型为

任意频点fi测得的相位差值关系式为

如图3所示建立二维的Δφ-f坐标系ui为Δφi到直线Δφ(f)=kf+b的距离,则有



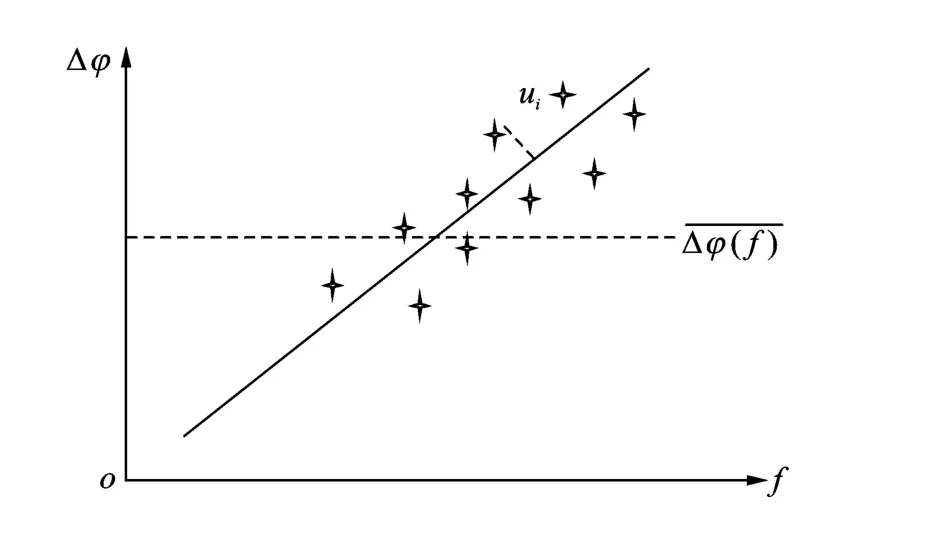
图3 Δφ-f坐标系Fig.3 Δφ-fcoordinate system


由式(15)分析可知,R2是介于0和1之间的数,R2越大,说明回归线拟合程度越好;R2越小,说明回归线拟合程度越差。
1.3 基于频域的相位差(FD-PDOA)的双频比相法测距模型
分析式(7)和(13)可得基于频域的相位差的测距模型可表示为


算法描述如下:
步骤1:读写器开启跳频模式,依次加入N个样本频点fi(i=1,2,…,N),对待测无源标签进行扫描,并且建立ui与fi的N阶方阵A,初始化为0;
步骤2:对于样本频点fi处测得的相位偏差ui,将其加入N阶方阵A中;
步骤3:检查i值,若小于N则跳回步骤2;否则利用得到的N阶方阵A求出tr(AAT);
步骤5:根据步骤1~4测得读写器天线与无源标签零距离时的值l,利用式(16)得到最终的无源标签的距离信息。
测量系统的整体流程如图4所示。
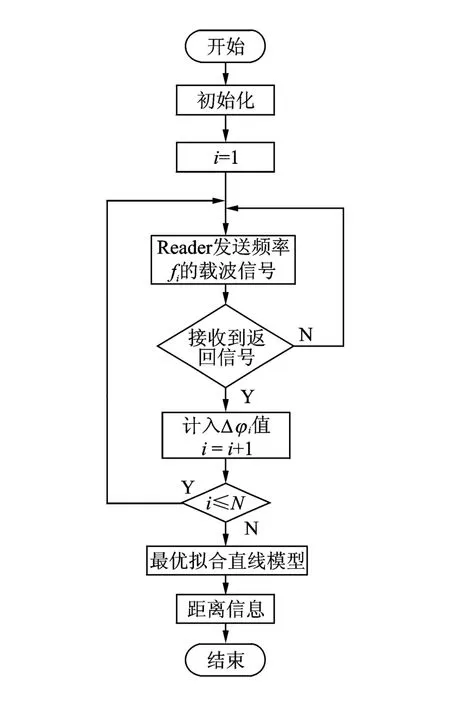
图4 测试系统流程图Fig.4 Flow chart of test system
利用PDOA双频比相法测距方案由于频点选取的随机性会带来大量的随机误差导致最终测量结果产生非常大的浮动性。为了克服这些随机误差的影响,本方案中读写器向无源标签发送频率为fi(i=1,2,…,N)的载波信号,通过对N个相邻频率差为1MHz的样本频点测量得到的 Δφi(i=1,2,…,N)值进行取样,利用最小二乘法以及一次线性回归分析了频域上相位差变化的整体特性,求出最优拟合直线的回归模型,根据式(16)的测距模型得到最终距离信息。
2 实验方案与结果分析
本文主要采用以AS3992为射频收发模块的读写器完成对无源标签的测量[15],并且通过Matlab对得到的数据进行仿真。AS3992是奥地利微电子公司推出的单片射频收发器芯片,同时支持ISO 18000-6C(EPC Gen2)以及ISO 18000-6A/B通信协议[16],在发射电路端集成了功率放大器、锁相环、压控振荡器、频率合成器和调制器等模块;在接收电路端集成了低噪声放大器、混频器、中频放大器、解调器等模块。同时还集成了电源电压管理、协议控制等工作模块,从而使芯片外围电路大大简化。测试系统总体模块如图5所示。
振荡器电路产生符合RFID系统要求的射频振荡频率,一路经过时钟电路产生微控制器所需要的时钟信号,另外一路经过载波形成电路产生读写器工作的载波信号。射频发射端包括编码、调制和功率放大电路,用于向电子标签传送命令和写数据。射频接收端包括解调、解码电路,用于接收电子标签返回的应答信息和数据。MCU模块是读写器工作的核心,完成收发控制、向标签发送命令和写数据、标签数据读取和处理、与应用系统的高层进行通信等任务。电源模块为系统的正常工作供能,天线的作用就是产生磁通量,为无源标签提供电源,在读写设备和标签之间传送信息,天线的有效电磁场范围就是系统的工作区域。相位的获取模块是由IQ解调电路,可增益放大和AD转换电路三部分组成,实现对接收信号与发射信号之间相位差值的获取,并且传递给MCU模块交由上位机软件模块(Matlab)对数据进行分析处理得到距离信息。无源标签对收到的载波信号采用ASK调制方式并反射回读写器[17]。
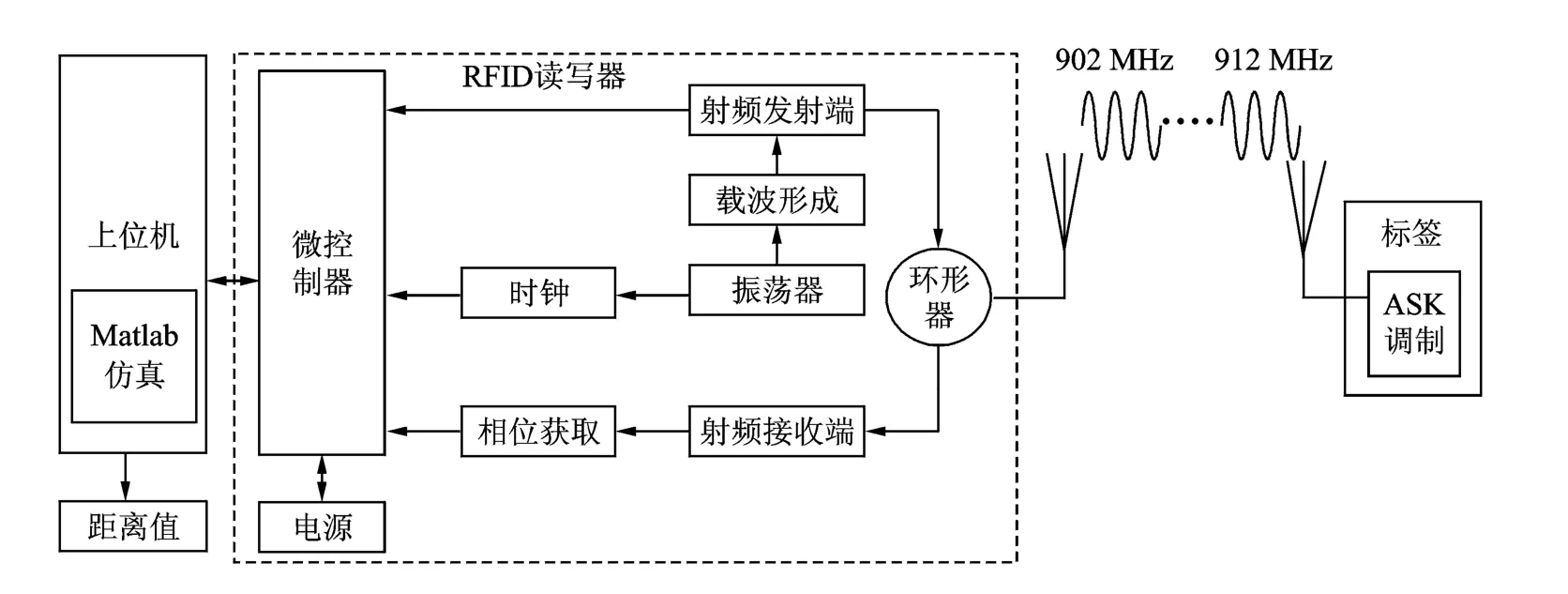
图5 测试系统总体框架图Fig.5 Overall frams of test system
本实验测量时对于阅读器接收到标签返回信号后,经过本振混频和低通滤波后得到I/Q两路信号,根据该两路信号的反正切值即可得到相位差信息,同时将测得相位差值组成样本空间,利用Matlab对实验数据进行分析。测量时取10个样本频点,频率差为1MHz,频率设定为902.75,903.75,904.75,905.75,906.75,907.75,908.75,909.75,910.75,911.75MHz。在0.5m和1.0m 处分别进行了10次测量实验,方案1采用基于PDOA双频比相法,取每次10个频点上测得相位差的平均值。方案2采用基于FD-PDOA的双频比相法,取每次10个频点上利用线性回归模型测得的拟合最优值。表1给出了阅读器与无源标签天线之间的距离在0.5m,1.0m时利用上述两种方案进行10次实验得到的误差值。

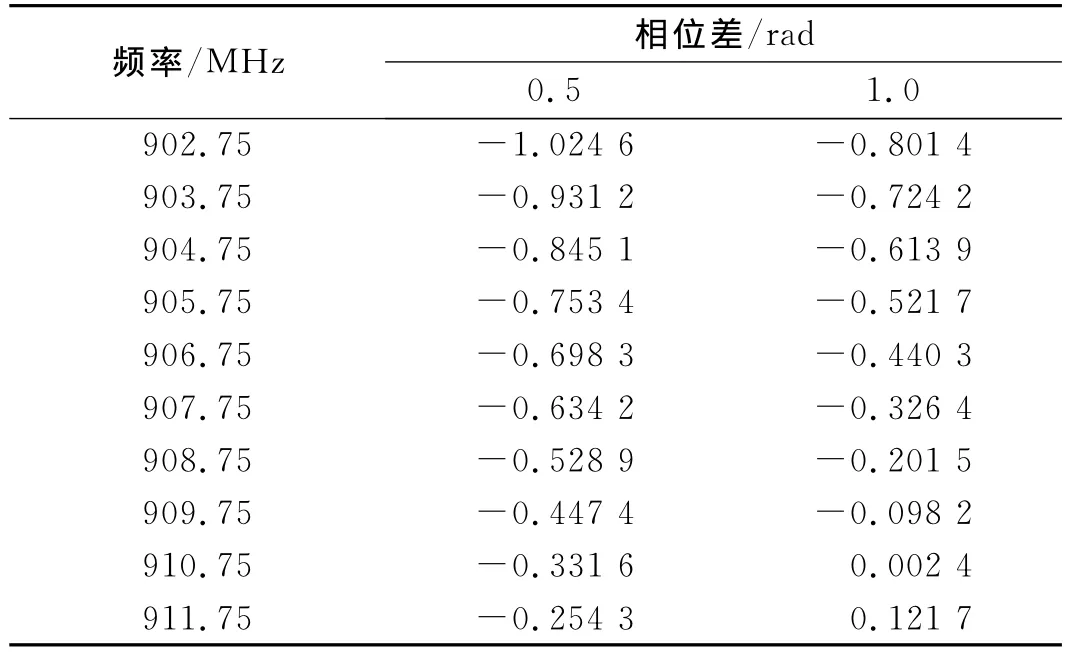
表2 测得不同频点的相位差值Table 2 Measured phase differentiation in different frequency

分析表2中0.5m处和1.0m处得到的相位差值,图6给出了在0.5m,1.0m处采用PDOA双频比相测距方案在各频点的测距误差示,发现利用基于PDOA双频比相法的测距方案在0.5m处频率选取为905.75MHz和906.75MHz时所带来的随机误差最大可达0.74m,在频率选取为903.75MHz和904.75MHz时带来的随机误差最小为0.01m。在1.0m处,频率选取为901.75MHz和902.75 MHz时所带来的随机误差最大可达0.75m,在频率选取903.75MHz和904.75MHz时带来的随机误差最小为0.06m。因此若采用基于PDOA双频比相法的测距方案,会发现在大部分频点上随机误差非常大,说明在这些频点上测得的数据受到多径效应以及噪声等非理想因素的影响非常严重,无法反映相位差值变化的整体特性。

图6 不同距离处各频率点测距误差Fig.6 Ranging errors of each frequency at different distances

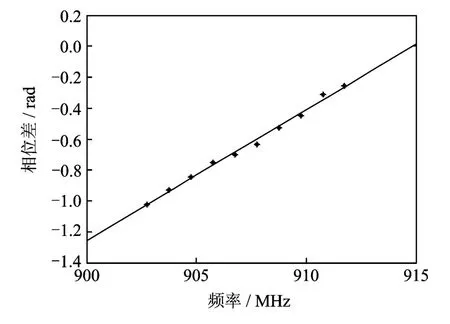
图7 0.5m处回归拟合直线仿真Fig.7 Linear regression simulation at 0.5m
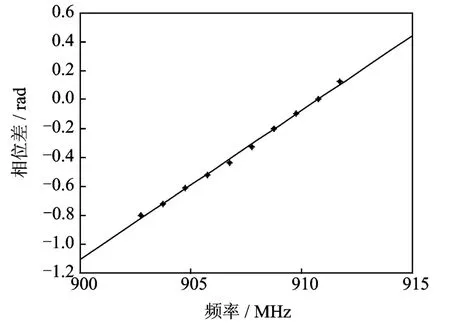
图8 1.0m处回归拟合直线仿真 Fig.8 Linear regression simulation at 1.0m
3 结束语
随着RFID应用的越来越广泛[18],对于RFID定位技术的研究(特别是在医院、图书馆等重要的场所)显得尤为重要。本文提出了一种基于频域的信号到达相位差的双频比相法测距方案,利用统计学原理,选取特定的频点组成样本空间,分析选取频域的相位差值的整体特性,最后利用Matlab对该样本空间中的数据进行仿真分析求出最佳的拟合直线,利用该测距模型得到无源标签的距离信息。实验表明,基于FD-PDOA的双频比相法测距方案能很好地反映相位差值的整体变化特性,对该领域的研究有着一定的指导意义。目前多种定位技术(比如wifi,zigbee等技术)同RFID之间结合的方式也越来越丰富[19],多种定位方式的结合将会给人类以后的日常生活带来更大的便利,这将成为本课题以后需要深入研究的方向。
[1] Sarkka S,Viikari V V,Huusko M,et al.Phase-based UHF RFID tracking with nonlinear Kalman filtering and smoothing[J].Sensors Journal,IEEE,2012,12(5):904-910.
[3] Azzouzi S,Cremer M,Dettmar U,et al.New measurement results for the localization of UHF RFID transponders using an angle of arrival(AoA)approach[C]∥RFID(RFID),2011IEEE International Conference on.[S.l.]:IEEE,2011:91-97.
[4] Miesen R,Ebelt R,Kirsch F,et al.Where is the tag?[J].Microwave Magazine,2011,12(7):S49-S63.
[5] Nikitin P V,Martinez R,Ramamurthy S,et al.Phase based spatial identification of UHF RFID tags[C]∥RFID,2010 IEEE International Conference on.[S.l.]:IEEE,2010:102-109.
[6] Scherhaufl M,Pichler M,Muller D,et al.Phase-of-arrival-based localization of passive UHF RFID tags[C]∥Microwave Symposium Digest(IMS),2013IEEE MTT-S International.[S.l.]:IEEE,2013:1-3.
[7] 史伟光,刘开华,房静静,等.双频副载波调幅的 UHF RFID定位研究[J].哈尔滨工业大学学报,2012,44(3):81-86.
Si Weiguang,Liu Kaihua,Fang Jingjing,et al.UHF RFID location algorithm based on dual frequency subcarriers amplitude modulation[J].Journal of Harbin Institute of Technology,2012,44(3):81-86.
[8] Arnitz D,Witrisal K,Muehlmann U.Multifrequency continuous-wave radar approach to ranging in passive UHF RFID[J].Microwave Theory and Techniques,IEEE Transactions on,2009,57(5):1398-1405.
[9] Liu J,Tan X,Min H.Dual frequency based real time location system using passive UHF RFID[C]∥ASIC(ASICON),2011IEEE 9th International Conference on.[S.l.]:IEEE,2011:779-782.
[10]安文霞.超高频无源RFID标签距离测量方法研究[D].成都:西华大学,2013.
An Wenxia.Study distance measurement method of UHF passive RFID tag[D].Chengdu:Xihua University,2013.
[11]王峰.基于UHF RFID的室内定位系统研究与设计[D].重庆:重庆大学,2012.
Wang Feng.Study and design on indoor localization system based on UHF RFID[D].Chongqing:Chongqing University.2012.
[12]Povalac A,Sebesta J.Phase difference of arrival distance estimation for RFID tags in frequency domain[C]∥RFID-Technologies and Applications(RFID-TA),2011IEEE International Conference on.[S.l.]:IEEE,2011:188-193.
[13]Viikari V,Pursula P,Jaakkola K.Ranging of UHF RFID tag using stepped frequency read-out[J].Sensors Journal,IEEE,2010,10(9):1535-1539.
[14]罗柏文,万明康,于宏毅.两种基于自适应相位补偿的FDOA估计算法[J].数据采集与处理,2012,27(1):20-26.
Luo Baiwen,Wan Mingkang,Yu Hongyi.Two algorithms for FDOA estimation based on adaptive phase compensator[J].Journal of Data Acquisition and Processing.2012,27(1):20-26.
[15]EPCglobal E P C.Radio-frequency identity protocols class-1generation-2UHF RFID protocol for communications at 860 MHz-960MHz version 1.0.9[EB/OL].http:∥wenku.baidu.com/view/63dbed of 76c66137ee06192d.html,2014-07-10.
[16]Austria Microsystems.AS3992datasheet[EB/OL].http://www.austriamicrosystems.com,2014-07-15.
[17]Declercq M,Dehollain C,Joehl N.Design and optimization of passive UHF RFID systems[M].New York:Springer,2007.
[18]Nepa P,Lombardini F,Buffi A.Location and tracking of UHF-RFID tags[C]//Antennas and Propagation in Wireless Communications(APWC),2011IEEE-APS Topical Conference on.[S.l.]:IEEE,2011:1062-1065.
[19]张令文,杨刚.超宽带室内定位关键技术[J].数据采集与处理,2013,28(6):706-713.
Zhang Lingwen,Yang Gang.Ultra-wide-band indoor positioning technologies[J].Journal of Data Acquisition and Processing,2013,28(6):706-713.
猜你喜欢
电子制作(2019年12期)2019-07-16
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
电信工程技术与标准化(2015年10期)2015-12-22
电测与仪表(2015年13期)2015-04-09
火控雷达技术(2014年1期)2014-06-23
中国交通信息化(2014年4期)2014-06-05
北京航空航天大学学报(2013年6期)2013-12-19
电信工程技术与标准化(2013年4期)2013-08-09
电子科技大学学报(2011年3期)2011-02-10
