
改进的容积卡尔曼滤波(CKF)算法在短期负荷预测中的应用
2015-07-25 06:42吉博文邹红波
三峡大学学报(自然科学版) 2015年5期
吉博文 邹红波 何 平 倪 浩 祝 迪
(1.三峡大学 电气与新能源学院,湖北 宜昌 443002;2宜昌供电公司,湖北 宜昌 443002)
负荷预测是现代电力科学研究的重要领域之一,它对电力系统的安全经济运行及国民经济都有非常重要的意义.随着我国电力事业的发展,国家和电力部门对电网管理的质量要求越来越高,使得如何提高短期电力负荷预测精度的问题得到广泛研究[1-6].
卡尔曼滤波算法是一种递推滤波方法,主要优点是能充分利用待测数据过程的相关信息.该方法应用于负荷预测的具体过程是:把负荷分为确定性分量和随机性分量,对确定分量通常采用线性回归模型预测,对随机分量则采用卡尔曼滤波算法预测.但当随机变量为强非线性随机变量时,滤波则难以取得较高的精度.20世纪90年代出现了较新的非线性滤波方法,这类方法采用样本加权求和直接逼近随机函数,且其测量更新部分采用卡尔曼滤波的更新原理,这类滤波器有无迹卡尔曼滤波器、中心差分卡尔曼滤波器、容积卡尔曼滤波器等[7-8].本文工作是在电力系统负荷随机变量存在较强非线性的情况下,将所有引起负荷变化的因素如降雨、温度、湿度等归结为针对随机系统的随机因素输入,采用基于改进容积卡尔曼滤波(CKF)算法进行预测,并以仿真测试验证了该模型的有效性.
1 卡尔曼滤波算法
随机信号及其测量过程的数学模型分别为:

基于投影法推导的卡尔曼滤波器递推公式和预测方程为:
状态预测方程:

误差协方差预测:

状态估计校正:

误差协方差估计校正:

卡尔曼增益:

以上各式中,xk是n维状态向量;zk是m维观测向量;Φk,k-1是n×n维一步状态转移矩阵;Hk是m×n维观测矩阵.n维系统噪声ωk和m维观测噪声vk均是互不相关的零均值高斯白噪声序列,并且具有如下的统计特性:

通常情况下,滤波初始值0=0,P0=I,0和I均是相应维数的零矩阵和单位矩阵.
2 CKF算法
假定有如下离散非线性系统

式中,x(k)为状态向量,f(·)为非线性系统状态函数,ω(k)为系统的过程噪声,且为零均值高斯白噪声,满足分布ω(k)~N{0,Q(k)};z(k)为测量值,h(·)为非线性观测函数,v(k)为系统的量测噪声,满足分布v(k)~N{0,R(k)};状态的初始值x(0)满足分布x(0)~N{0,P(0)}.
1)容积点选取
为了解决高斯密度函数与多变量非线性函数乘积的积分,Arasaratnam等人采用了三阶容积积分方法,用容积点加权求和取代了加权高斯积分计算,如对于函数f(x)的加权高斯积分,有

式中,f(x)是任意函数,Rn是积分区域,容积点εi为:

式中,[1]i表示[1]的第i列,[1]为:
2)时间预测
计算容积点:

传播容积点:

估计预测均值:

估计预测协方差:

3)量测更新
当获得时间预测值后,利用下面一组递推方程对状态和方差进行更新.CKF算法量测更新方程如下:
计算容积点:

传播容积点:

计算新息方差和协方差矩阵:
计算滤波增益矩阵:

计算量测更新方程:

3 卡尔曼滤波负荷预测模型参数辨识
3.1 模型阶数辨识
本文采用Hankel矩阵法辨识模型的阶,在系统的随机负荷序列x1,x2,…,xN已知的情况下,按以下形式构造Hankel矩阵(简称为H矩阵).

其维数为l×l,由于观测信息中总会有噪声,要有效地估计含噪声系统的阶数,可以采用如下算法:
1)弱噪声系统条件下
计算每个l值(l=1,2,3,…)时,k取不同值时H阵行列式的平均值.令

当Dl达到极大值时,即为系统的估计阶数n.
2)强噪声系统条件下
如果负荷序列所含噪声比较大,为了可靠地确定模型的阶数,构造Hankel矩阵时,不能直接用随机负荷序列,而采用随机负荷序列的自相关系数构造H阵.用自相关系数代替H阵中的元素,构成以自相关系数ri为元素的H阵,再计算l取不同值时H阵的行阵式值,比较所得行阵式值,达到极小值时,l值即为所求系统的阶数.
3.2 噪声协方差Q及R初始值的辨识
关于Q(t)的选取方法,对通常的动态系统,可认为滤波误差的统计特性基本保持不变,近似为正态分布白噪声,因此,可取Q(t)为常值Q,而Q通过事先的模拟计算加以确定.当采用模拟观测量进行计算时,主要考虑的是滤波误差序列,开始时若Q选取过小,则滤波误差序列将发散;Q增大到某个值Q*时,滤波误差的趋势将会在某一稳态值附近摆动,此时有最小的稳态误差;若Q超过Q*,滤波误差的变化趋势仍会在某一稳态值附近摆动,但稳态误差将随Q增大,因此Q较好的取值应该是稍大于Q*.当用实际负荷值进行计算时,主要考察的是预测残差序列.对于某些情况,滤波误差的统计特性随时间变化较大,此时Q(t)取常值未必恰当,应该是随时间变化的,这应根据具体问题而定.R(t)的选取方法与Q(t)类似.
4 改进方法及应用
通过不断更新状态转移矩阵,可得到改进的容积卡尔曼滤波方法,具体计算步骤为:
1)导入随机负荷SJ,计算初始参数φ(0)、C、Q、R.C为容积点,其个数是模型阶数的2倍.
2)设置初始条件:初始迭代值(0),初始值方差P(0).
3)时间更新:根据式(13)计算容积点,式(14)计算传播容积点,式(15)估计预测均值(k|k-1),式(16)估计预测协方差P(k|k-1).
4)状态测量更新:根据式(17)计算容积点,式(18)和式(19)计算传播容积点Zi,k|k-1和|k-1,式(20)和式(21)计算新息方差阵Pxz,k|k-1和协方差阵Pzz,k|k-1;根据式(22)计算滤波增益矩阵Kk,根据式(23)计算状态值|k-1,根据式(24)计算状态值方差Pk|k.
5)更新状态转移矩阵:删除导入的随机负荷数据SJ的第一个数据,余下数据依次左移,左后一个数据用(k)替换,获得新的数据序列SJ(k).根据新的数据序列计算φ(k),重复3)、4)过程.具体仿真流程如图1所示.

图1 改进的容积卡尔曼滤波仿真流程图
为了验证改进算法的有效性,用2011年某地8月的22d数据建立模型,对该月余下9个工作日216个时刻的负荷进行预测.样本负荷分析过程为:处理异常数据点;采用去均值的方法处理样本负荷;抽取样本随机负荷,确定随机负荷为强噪声负荷;运用基于自相关函数的Hankel矩阵法辨识得模型为4阶模型,并利用Yule-Walker方程求取最佳阶数下状态转移矩阵以及其它模型系数.模型参数以及递推初始值如下:状态转移矩阵A=[0.395 10 -0.628 14 0.118 25 0.539 07 -1.019 94 ;1 0 0 0 0;0 1 0 0 0;0 0 1 0 0;0 0 0 1 0];量测噪声协方差初始值:R=120;状态噪声协方差初始值:Q=[198 0 0 0;0 200 0 0;0 0 199.6 0;0 0 0 119.67];系统阶数n=4;递推初始值(0)=0.01*randn(n,m),P(0)=eye(n).
模型值与真实值对比如图2所示,可以看出改进容积卡尔曼滤波器模型始终处于稳定状态,预测误差较小.由具体数据可以算出预测阶段9d平均相对误差为0.16%,平均绝对百分误差2.76%,小于3%,说明其预测精度达到预期效果,令人满意.

图2 负荷预测和实测值对比
为了更清楚地显示预测效果,现从预测数据库中随机抽取1d的负荷预测数据(随机抽取为第3d),并与实际负荷数据进行对比,结果见表1.
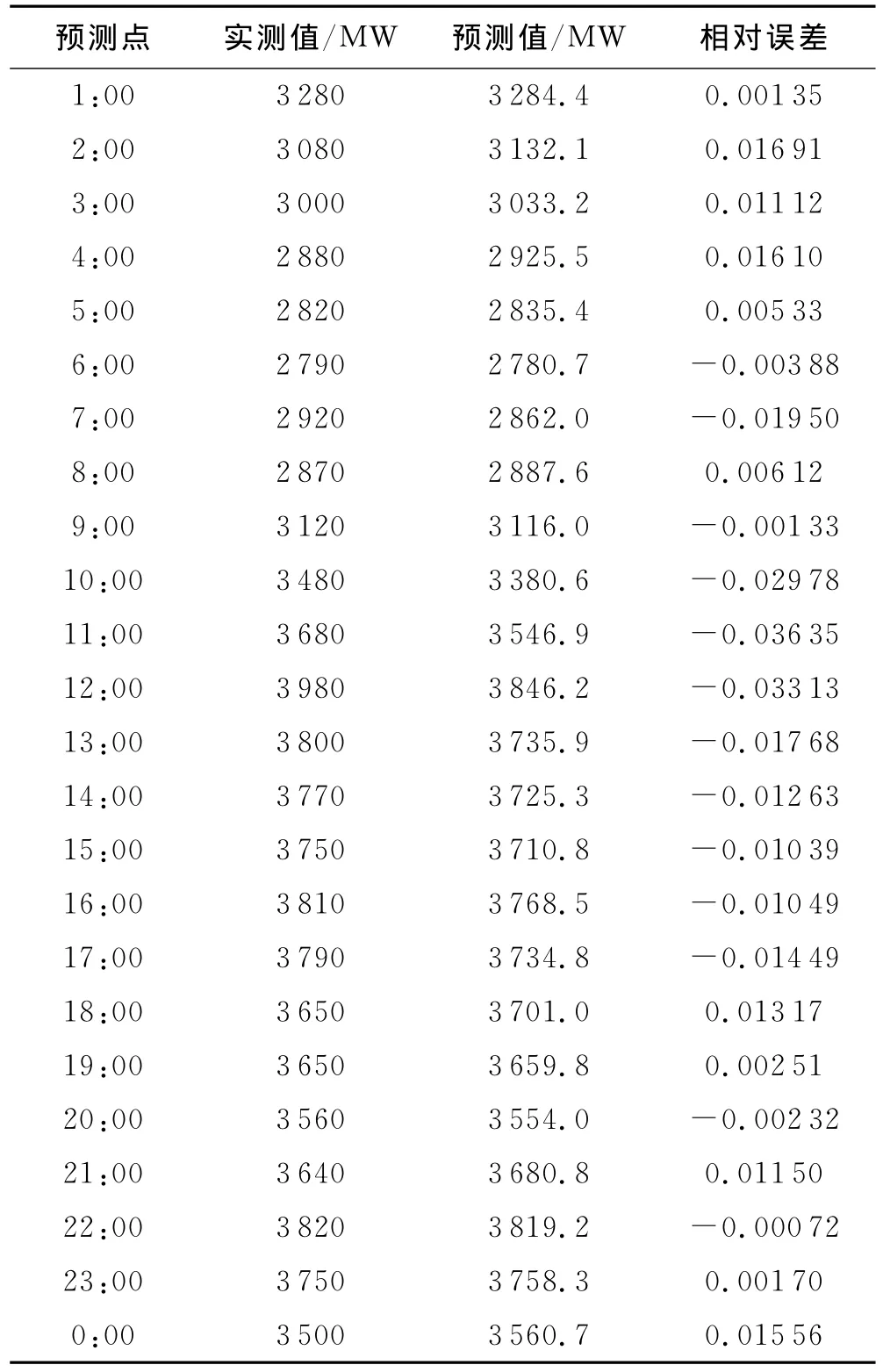
表1 第3d预测结果比较
5 结 语
本文用改进CKF对电力系统负荷建模预测,将所有引起负荷变化的因素如降雨、温度和湿度等归为随机系统中的随机因素来计算,模型结果证明了这种方法是有效的,具有较高的计算精度.
CKF方法用容积点对非线性序列的近似,避免了对非线性函数的解析求导(还可以处理不可导的非线性函数),减少了计算量,节省了计算时间.
本文的噪声协方差Q及R均是定常值,此方法要求对噪声统计特性的先验知识有准确的掌握,如果采用了不准确的噪声统计特性设计滤波器模型,就会产生较大的估计误差,甚至导致滤波发散.解决该问题可以借鉴自适应卡尔曼滤波,通过引入噪声估值器在线校正模型参数或噪声统计值,提高滤波精度.实际应用中对此问题可做进一步研究.
[1] 孟思齐,杨洪耕.基于卡尔曼滤波二次修正的短期负荷预测[J].电网与水力发电进展,2008,24(2):78-82.
[2] 马静波,杨洪耕.自适应卡尔曼滤波在电力系统短期负荷预测中的应用[J].电网技术,2005,29(1):75-79.
[3] 张 民,鲍 海,晏 玲,等.基于卡尔曼滤波的短期负荷预测方法的研究[J].电网技术,2003,27(10):39-42.
[4] 廖旎焕,胡智宏,马莹莹,等.电力系统短期负荷预测综述[J].电力系统保护与控制,2011,39(1):147-152.
[5] Al-Hamadi H M,Soliman S A.Short-term Electric Load Forecasting Based on Kalman Filtering Algorithm with Moving Windows Weather and Load Model[J].Electric Power System Research,2004(68):47-59.
[6] 吉培荣,简作群.电力系统短期负荷预报[J].水电能源科学,1997,15(2):37-41.
[7] 刘 胜,张红梅.最优估计理论[M].北京:科学出版社,2011.
[8] 王志贤.最优状态估计与系统辨识[M].西安:西北工业大学出版社,2004.
猜你喜欢
小学生学习指导(高年级)(2022年4期)2022-04-26
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
读写算·高年级(2017年6期)2017-06-27
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
系统工程与电子技术(2016年2期)2016-04-16
自动化学报(2016年8期)2016-04-16
癌症进展(2016年10期)2016-03-20
电源技术(2016年9期)2016-02-27
