
CRH 5型动车组牵引部件键合图建模及故障注入
2015-07-25 08:56勇佳棋陆宁云
应用技术学报 2015年3期
勇佳棋, 姜 斌, 陆宁云
CRH 5型动车组牵引部件键合图建模及故障注入
勇佳棋,姜斌,陆宁云
(南京航空航天大学自动化学院,南京210016)
CRH 5型动车组牵引部件具有非线性、多能域等特点,不易获取准确的系统级机理模型,而基于数据的建模方法又很难描述系统的拓扑结构和元件间的因果关系.利用键合图建模理论多能域、图形化的特点,建立与实际物理系统相吻合的牵引电动机和齿轮箱级联系统的键合图模型;研究牵引电动机常见故障的注入,在键合图中模拟电动机定子绕组短路故障,分析故障下机-电能域间的交互影响,展示键合图建模在故障传播分析和故障诊断方面的应用前景.仿真结果验证正常和故障工况下键合图模型的准确性.
CRH 5型动车组;牵引部件;键合图模型;故障注入
高速列车运行系统是大型复杂工程系统,与乘客的人身、财产安全息息相关,对系统可靠性有极高要求[1].从高速列车产生伊始,其安全事故从未停止发生[2].牵引传动系统是动车组关键组成部分,由受电弓、主断路器、牵引变压器、牵引变流器、牵引电动机及齿轮传动等部件组成[3],部件间具有复杂能域耦合关系,部件故障容易传播扩散,影响整个系统的正常稳定运行.动车组牵引传动系统部件的模型建立、故障诊断及传播机制是当前的研究热点.
CRH 5型动车组牵引传动系统的多能域耦合、非线性等特点使得系统建模困难.传统建模方法大多局限于某一部件或能域,不能统一系统内不同能域的变量,并揭示其因果关系.键合图理论的出现和发展,为解决上述问题提供了一条新途径[4].
作为一种图形化的建模方法,键合图法通过具有明确物理意义的键合图元件和严格的因果关系,形象地描述系统元件间的信息,深入描述系统内部状态的变化过程,非常适合多能域系统的建模.同时,由于键合图模型与实际物理对象间存在一一对应的关系,并且元件间有着明确的因果关系,与传统的基于模型、数据等故障诊断方法相比[5-6],基于键合图的方法更容易揭示设备或系统内部的运行机理[7],为微小、渐变、复合故障的诊断与预测研究提供便利.
1 键合图基本原理
为解决多种能量并存系统的建模问题,Paynter 于1959年提出键合图理论,以向量形式给出复杂系统的简练描述,适用于多变量复杂线性或非线性系统,在机械、热力学、电子系统等工程技术领域得到广泛应用.基于能量守恒原理,键合图法把不同能量领域的多种物理量统一归纳为势、流、位移和动量等4种变量,实现对整个系统模型充分完备的描述[8].
不同能域的能量变量和键合图理论中的广义状态变量间的对应关系见表1.其中:
势e和流f的标量积即功率为
P(t)=e(t)f(t)
广义动量表达式为
p(t)=∫te(t)d t
广义位移表达式为
q(t)=∫tf(t)d t

表1 能量变量和广义状态变量Tab.1 Energy variables and generalized state variables
使用键合图广义变量,仅需几种基本元件就能统一表示多能域系统模型.在键合图理论中,有一通口、二通口和多通口元件等9种基本元件(见表2),每种元件能如实反映所描述器件的物理效应.一通口元件只有1个功率传输进出口,势源和流源为外环境对系统的作用,阻性元件为耗散功率的元件,容性和惯性元件为储能元件.二通口元件含2个进出口,输入侧的功率与输出侧功率相等,变换器描述势与势、流与流之间的关系,回转器描述势与流之间的关系.多通口元件也称作结点,0结(共势结)各功率键的势值相等,流的代数和为0;1结(共流结)各功率键的流值相等,势的代数和为0.

表2 键合图基本元件Tab.2 Basic elements of bond graph
2 牵引部件模型及故障分析
在电能域中,0结相当于并联节点,1结相当于串联节点.根据系统工作原理,按照一定步骤,能搭建复杂系统的模型并得出相应的因果关系,以用于故障诊断[9].
牵引传动系统结构原理简图如图1所示.

图1 牵引系统结构Fig.1 Structure of traction system
列车运行时,牵引逆变器输出0~2 808 V三相交流电源驱动牵引电动机,电动机的转矩和转速通过齿轮变速箱传递给轮对,驱动列车运行,实现电能到机械能的转换[10].CRH 5传动系统与其他动车组列车最大的区别在于,其传动系统采用牵引电动机+万向轴+齿轮箱的结构[11].牵引电动机是涉及电能到机械能转换的核心设备,为动车组提供必须的牵引力[12].本文建立CRH 5动车组牵引电动机和齿轮箱的级联键合图模型,并进行易发故障注入研究.
2.1牵引电动机
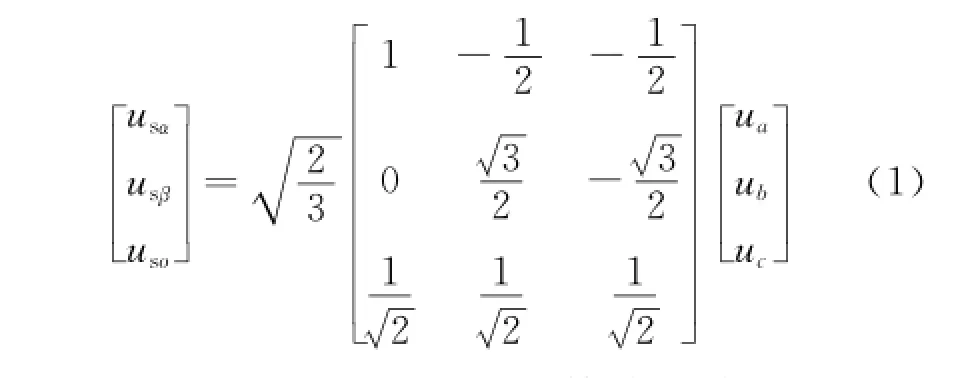
动车组的驱动元件是结构简单、质量轻、性能可靠的三相鼠笼型异步电动机.根据等效电路和所选择的参考系,建立电动机键合图模型[13-14].基于等效电路,在α-β参考系下建立牵引电动机Park模型,其与固定坐标系间的转换关系如下:
三相鼠笼式异步电动机的等效电路如图2所示.Rs、Rr、Rm分别为定子电阻、转子电阻和漏电阻;Ls,Lr,Lm分别为定子电感、转子电感和漏感;ωr=ω×np为转子速度;P为极数;np=P/2为极对数.

图2 电动机等效模型Fig.2 Equivalent model of the motor
电动机的电磁转矩

式中:irα,irβ分别为α和β相转子电流.
磁通变量:

电能到机械能的转化可通过回转器(GY)实现.参考表1、2,整个电动机的键合图模型如图3所示.其中,J为转子惯量,μ为摩擦因数,MSe是负载.

图3 电动机键合图模型Fig.3 Bond graph model of the motor
2.2齿轮传动
齿轮箱通过万向轴与电动机相连[15].齿轮传动可以用1个二通口元件变换器表示,传动比即变换模数.齿轮箱键合图模型见图4.其中,Rsh和Ksh分别为万向轴的摩擦因数和刚度.

图4 齿轮箱键合图模型Fig.4 Bond graph model of the gearbox
2.3级联部件模型
牵引电动机将电能转换为机械能,通过转矩和角速度的形式将能量传递给齿轮箱,给动车组提供动力.因此,电动机的两相输出通过回转器将电能转化为机械能传递给万向轴,再提供给齿轮箱.电动机和齿轮箱连接后的完整键合图模型如图5所示.
2.4电动机绕组故障及分析
牵引电动机基于电磁感应作用在转子中产生感应电流,从而产生电磁转矩.牵引电动机的主要故障可分为定子绕组故障(12.89%)、气隙偏心故障、转子断条或端环故障(7.64%)、轴承故障(41.77%)等,定子绕组故障中匝间短路故障最为常见,且能连带引发其余故障.当定子绕组某相发生短路故障,则电动机三相不对称,短路相电流的幅值随短路匝数增加而增大;当短路匝数较小时,电流幅值变化不明显,但电动机温度会随之上升,加速短路匝数的数量,引起更严重的后果.目前,大多数模拟定子绕组短路故障的方法为改变定子三相参数,引入定子三相不对称系数模拟故障时的各变量变化规律,本文也采用此方法模拟故障过程.

图5 电动机、齿轮箱连接图Fig.5 Cascade connection of motor and gear
3 仿真分析
根据所建模型,利用键合图仿真软件20-sim进行仿真.加载时间为1 s,给定负载转矩为

则t=0~0.5 s,部件为空载状态;t=0.5~1.0 s,载有额定负载.
3.1正常工况
在动车组正常运行过程中,所建模型与CRH 5型动车组牵引部件相对应,参数设置[16]依照CRH 5型动车组原型.电动机:Pn=568 k W,vn= 2.089 3 k V,In=211.22 A,n=1 177 r/min,Fn= 59.8 Hz,极数为6;齿轮箱:摩擦因数为0.12,刚度为560 k N·m/rad.电动机和齿轮箱中相应变量的时间响应见图6~9.由图可知,电动机内部定子电流和转子磁通在启动过程后趋于平稳,电动机稳态电流在额定电流允许范围内且接近;电动机电磁转矩由于低惯量和启动过程的影响,在仿真开始时有较大振荡,但很快平稳下来,达到目标值;齿轮箱输出角速度也快速上升到空载值,并在负载后略微下降.因此,说明所建模型的准确性[16].

图6 定子三相电流(正常)Fig.6 Stator currentnormal

图7 转子两相磁通(正常)Fig.7 Rotor fluxnormal

图8 电动机电磁转矩(正常)Fig.8 Motor electromagnetic torquenormal
3.2故障工况
在牵引电动机常见故障中,定子绕组短路故障属易发故障且容易造成恶劣影响.基于建立的CRH 5牵引部件键合图模型,研究在电动机定子绕组短路故障下的电能-机械能相互作用.匝间短路可以等效为某故障相等效电路参数的减小,其减小值用正常参数值乘以三相不对称系数表示.设定从t=0开始,在α相定子绕组中加入匝间短路故障,定子三相不对称系数设置为0.5%.
故障运行过程中,电动机和齿轮箱中相应变量的时间响应如图10~13所示.
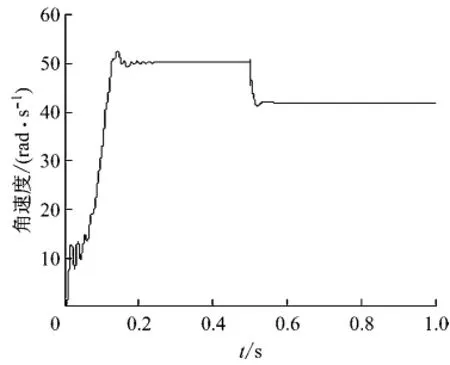
图9 齿轮箱输出角速度(正常)Fig.9 Gear output angular velocitynormal
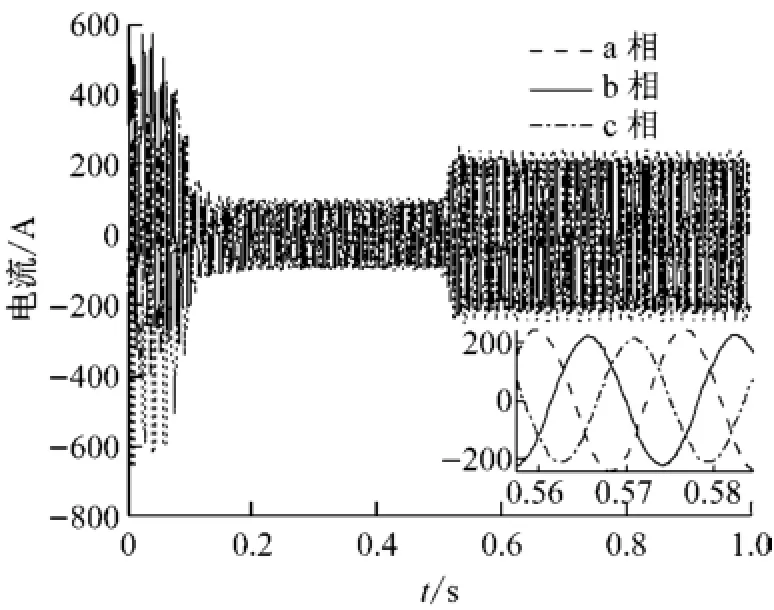
图10 定子三相电流(故障)Fig.10 Stator currentfaulty
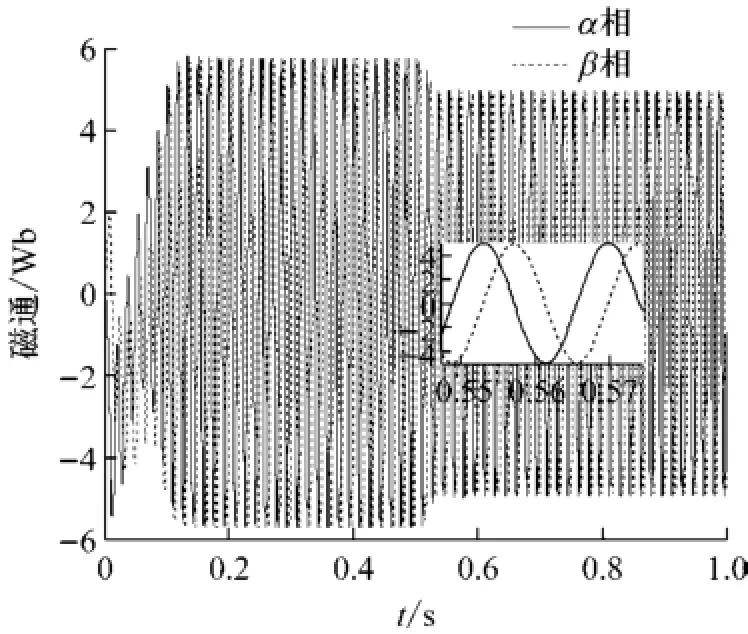
图11 转子两相磁通(故障)Fig.11 Rotor fluxfaulty

图12 电动机电磁转矩(故障)Fig.12 Motor electromagnetic torquefaulty

图13 齿轮箱输出角速度(故障)Fig.13 Gear output angular velocityfaulty
由图可知,当故障发生后,电磁转矩在达到稳态时仍有振荡,可能会造成电动机振动;三相定子电流不再对称,且某相电流幅值增大,导致电动机过热,并且当电动机绕组温度持续升高,短路匝数继续增多,烧坏电动机.显然,电能域中的故障对本身甚至机械能域都产生严重影响,通过故障的传递,对整个牵引传动系统产生严重影响.
4 结 语
提出用键合图理论对CRH 5型动车组牵引传动部件建模,通过简洁明了的方式建立与牵引部件物理结构一一对应的模型.简要介绍键合图的基本原理及其在动车组牵引部件方面建模的优越性;利用键合图元件搭建牵引电动机和齿轮箱的相应模型,形成完整的连接,阐述此模型中的易发故障;通过仿真验证所搭模型的正确性,并模拟其中1种故障过程,研究故障状况下机电之间的相互作用.
[1]宗刚,张超,王华胜.基于复杂网络理论的高速列车牵引系统部件可靠性研究[J].中国铁道科学,2014,35(1):94-97.
[2]崔秀国.CRH 3型动车组电气系统可靠性研究 [D].北京:北京交通大学,2013.
[3]邓学寿.CRH 2型200 km/h动车组牵引传动系统[J].机车电传动,2008(4):1-7.
[4]Borutzky W.Bond graph modelling of engineering systems[M].New York:Springer-Verlag,2011.
[5]姜斌,冒泽慧,杨浩.控制系统的故障诊断与故障调节[M].北京:国防工业出版社,2009.
[6]阮腾达.CRH 5动车组传动系统故障诊断方法研究[D].成都:西南交通大学,2014.
[7]Samantaray A K,Medjaher K,Bouamama B O,et al.Diagnostic bond graphs for online fault detection and isolation[J].Simulation Modelling Practice& Theory,2006,14(3):237-262.
[8]Thoma J U.Introduction to bond graphs and their applications[M].New York:Pergamon,1975.
[9]Benmoussa S,Bouamama B O,Merzouki R.Bond graph approach for plant fault detection and isolation:application to intelligent autonomous vehicle[J]. IEEE Trans Automation Sci&Eng,2014,11(2):585-593.
[10]王俊杰.动车组牵引系统介绍[J].产业与科技论坛,2012(6):60-61.
[11]阮腾达.CRH 5动车组传动系统故障诊断方法研究[D].成都:西南交通大学,2014.
[12]刘诗佳.动车组牵引系统故障统计分析[J].铁道机车车辆,2013,33(5):80-85.
[13]Roboam X,Gandanegara G,Sareni B,et al.Bond graph multi-time scale analysis of a railway traction system[C]//Proc 9th Eur Conf Power Electron& Applications.Graz,Austria,2001.
[14]Gandanegara G.Méthodologie de conception systémique en génieélectriqueàl'aide de l'outil bond graph:applicationàune chaine de traction ferroviaire [D].Toulouse:Universitéde Toulouse,2003.
[15]冷扬立,李秋泽,李庆国,等.CRH 5型动车组万向轴结构及临界转速分析[J].铁道车辆,2010(12):6-11.
[16]张曙光.CRH 5型动车组[M].北京:中国铁道出版社,2008.
(编辑吕丹)
Bond Graph Based Modeling and Fault lnjection for CRH 5 EMU Traction Devices
YONG Jiaqi,JIANG Bin,LU Ningyun
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
It is difficult to obtain accurate first-principle models for CRH 5 electric multiple units(EMU) traction devices as they usually have the characteristics of non-linearity and multi-domain coupling.Pure data-based modeling methods are also inadequate because they can’t model the topology of system and the causality between components.Bond graph(BG)is suitable for modeling multi-domain systems; therefore,it was used to model the cascaded traction devices consisting of an induction machine and a gearbox. Fault injection in traction devices wasalso studied by simulating a motor stator winding short circuit fault using the developed BG model.The purpose was to analyze the interaction between electrical/mechanical energy domains in traction devices in the presence of faults,to display the prospect of application of BG modeling in the study of fault diagnosis and fault propagation.The simulation results could verify the validity of the developed model for CRH 5 EMU traction devices in both normal and faulty conditions.
CRH 5 electric multiple units(EMU);traction devices;bond graphs model;fault injetion
TP 273
A
1671-7333(2015)03-0236-06
10.3969/j.issn.1671-7333.2015.03.006t
2015-01-11
国家自然科学基金资助项目(61490703);南京航空航天大学研究生创新基地(实验室)开放基金(kfjj201418)
勇佳棋(1990-),女,硕士生,主要研究方向为故障诊断及容错控制.E-mail:yongjiaqi1@163.com
姜斌(1966-),男,教授,博士,主要研究方向为故障诊断及容错控制.E-mail:binjiang@nuaa.edu.cn
猜你喜欢
山东冶金(2022年3期)2022-07-19
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
海峡姐妹(2020年2期)2020-03-03
铁道通信信号(2018年11期)2019-01-19
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年12期)2017-02-02
铁道通信信号(2016年11期)2016-06-01
