
混合动力越野汽车动力系统匹配研究
2015-07-20 05:50王慧晶胡东方马忠民郭万超北京汽车研究总院有限公司北京101300
小型内燃机与车辆技术 2015年1期
王慧晶 胡东方 马忠民 郭万超(北京汽车研究总院有限公司 北京 101300)
混合动力越野汽车动力系统匹配研究
王慧晶胡东方马忠民郭万超
(北京汽车研究总院有限公司北京101300)
以某四驱越野汽车为原型开发轴间耦合的并联四驱混合动力越野汽车,取消原车分动器,加装驱动电机、动力电池等电动部件,通过MATLAB软件进行动力系统优化设计和性能匹配计算,并对轴荷转矩进行校核分析,完成混合动力方案设计。仿真结果表明与传统越野汽车相比,提高了混合动力越野汽车的动力性和经济性,符合混合动力越野汽车的设计要求。
混合动力越野汽车轴间耦合动力系统性能匹配MATLAB仿真
引言
混合动力汽车开发初期,动力系统部件的优化选型和匹配计算是影响整车性能的主要因素,主要包括发动机、电动机、动力电池等电动部件的参数匹配计算和工作特性优化控制,使整车实现混合动力功能,保证动力性的同时,降低油耗和排放。
本文以某四驱越野汽车为原型开发轴间耦合的并联四驱混合动力越野汽车,通过部件选型,参数匹配、轴荷转矩校核研究,验证混合动力四驱性能的可行性。
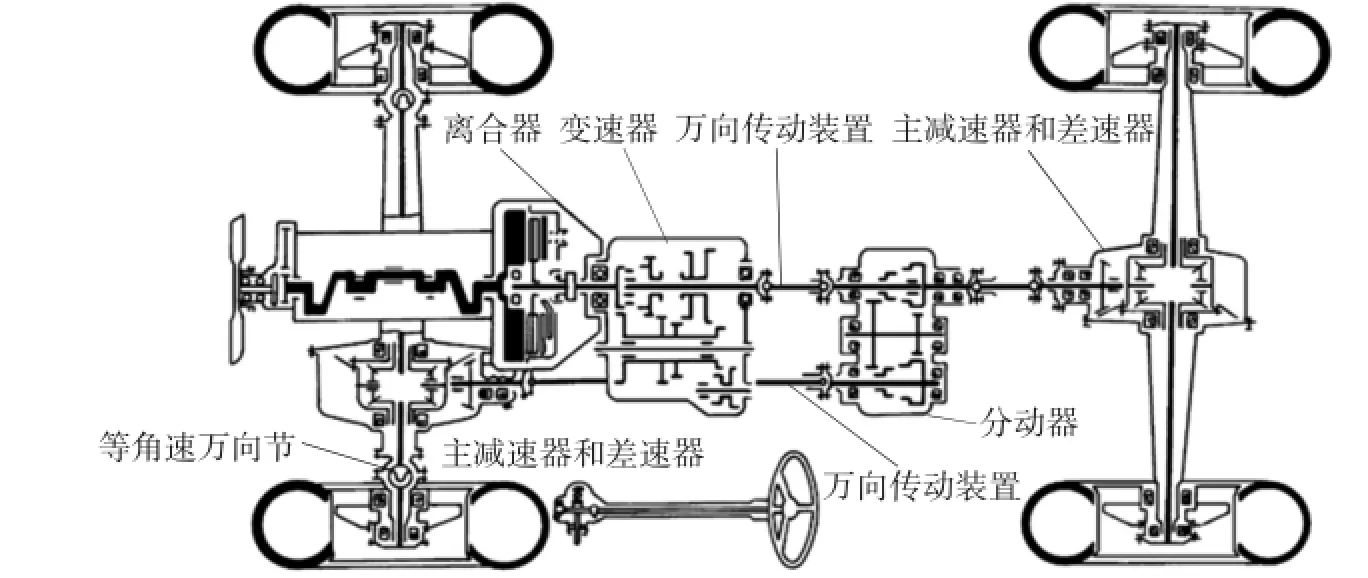
图1 四驱越野车结构示意图
1 轴间耦合混合动力方案
原四驱越野汽车结构方案如图1所示,由分动器与差速器分配前后轴动力,前后轴输出转矩保持一定的比例关系,不能很好地适应各种路面条件。
轴间耦合混合动力结构简图见图2,采用并联驱动概念[1],取消分动箱,增加驱动电机、动力电池、DC/DC等电动部件及控制器。由电机独立驱动前桥,内燃机独立驱动后桥,可根据路面情况和运行状况,进行混合驱动工况转换。
混合动力工况见图3,可按要求在纯电动、混合动力、停车充电等工况间切换。在合理的转矩控制下,电机助力对发动机转矩进行削峰填谷,实现混合动力工作模式。电机还可承担低速条件下的纯电动行驶,实现一定程度的节油减排效果。在越野路面及低附着系数的非铺装路面条件下,轴间耦合混合动力方案可提高整车越野性能。

图2 轴间耦合混合动力结构简图

图3 混合动力工况框图
2 混合动力系统性能匹配
2.1电机参数匹配
电机参数匹配直接关系到驱动电机的选型,进而对混合动力性能产生重大影响,是开发混合动力汽车的必要环节[2]。
电机外特性为:在额定转速以下,以恒转矩模式工作,在额定转速以上,以恒功率模式工作。电机参数包括额定功率、峰值功率、额定转速、最高转速的选择。选用原则为:高性能,低自重和小尺寸;在较宽的转速范围内有较高的效率;电磁辐射尽量小;成本低;维护方便;综合考虑其控制系统的特点,要求能尽可能实现双向控制,回收制动能量。
混合动力方案中,仅发动机驱动工况即可满足车辆的最高车速要求,且高速时后轮驱动可以提高车辆的操纵稳定性。四驱功能主要在转矩需求和越野爬坡工况下使用,因此对驱动电机的参数匹配主要考虑爬坡和越野转矩需求[3]。
2.1.1爬坡性能
对四驱车来说,最大爬坡度60%时,前后驱动轮的附着率都不能大于地面附着系数 φ=0.8。由MATLAB仿真可知[4],如果爬坡最低稳定车速按照发动机怠速转速计算(图4中E点)为7.3km/h,此时发动机输出转矩为2572N·m,电机需求转矩为3334 (5906~2572)N·m,大于地面能够给前轴提供的附着力(图5中B点)2376N·m,前轮会发生打滑。而如果将爬坡最低稳定车速提高到12km/h(图4中F点),则电机仅需提供的转矩为2277(5906~3629)N·m,小于地面附着力,不会发生打滑。
因此电机驱动前轴爬坡度为60%需提供的最小驱动转矩为2277N·m(60%爬坡最低稳定车速需大于12km/h)。

图4 爬坡转矩需求

图5 60%坡度地面附着力
由图6可知,对于60%的爬坡功率需求,可知电机起步功率(12km/h)需求为19.75(50.49~30.74)kW,持续电机功率(15km/h)需求为11.04(63.14~52.1)kW。

图6 爬坡功率需求

图7 前轮越障转矩需求
2)越障性能
计算前后轮的越障高度随驱动力矩变化的关系,由图7可知前轮过0.35m台阶前后轴需求转矩分别为2810N·m,5040N·m。
由图8可知后轮过0.28m台阶前后轴需求转矩分别为3031N·m,4380N·m。
计算前后轴转矩功率需求见表2。

图8 后轮越障转矩需求

表2 越野时前后轴最大转矩需求
选择前轴最大越障转矩需求3031N·m为电机峰值转矩需求,爬坡(60%)转矩需求2277N·m为额定转矩需求。电机与单级减速器的匹配见表3。
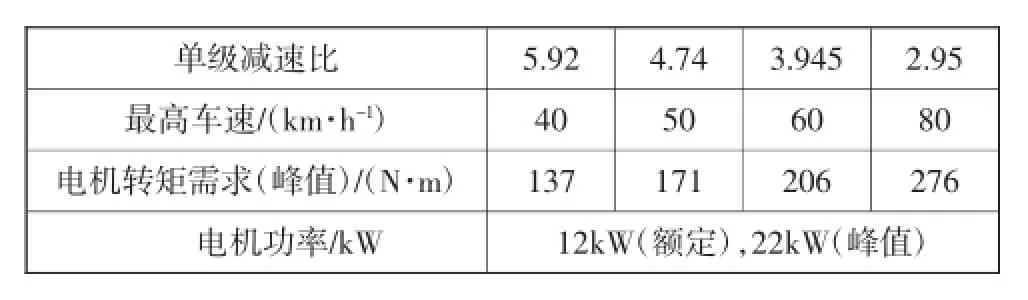
表3 电机与减速器参数匹配
由表3综合考虑,选取5.92为电机主减速比,电机驱动的最高车速为40km/h。
选择电压等级为288V的直流永磁无刷电动机,参数见表4,既具备交流电动机结构简单、运行可靠、维护方便等优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等优点。冷却方式选择水冷。

表4 电机匹配参数
原车设计涉水深度为600mm,分动器最低位置< 390mm,因此改装后如果在原车分动器位置安装电机,需考虑涉水时对电机的防水保护。
2.2电池参数匹配
电池参数主要指电压等级、功率、电池荷电状态(SOC)。一般考虑以下原则:电压等级要与电力系统电压等级和变化范围一致;最大充电和放电功率满足电机的功率要求;SOC应用范围。
电池需满足峰值放电和持续放电续驶里程需求,峰值放电为22kW,持续放电为12kW,按照峰值放电10C计算,持续放电5C计算,需要不小于2.89kW·h,电压等级为288V,则需要10.03A·h。
选择比能量和比功率高,循环寿命长的10A·h、288V锂离子电池。
2.3发电机参数匹配
发电机需满足对电池充电和整车低压电气供电需求,整车电气用电量按0.6kW计算,按照以上匹配电池容量,充电时间和发电机功率关系如表5所示(SOC可用范围按0.2~0.9计算)。

表5 发电机参数匹配
表5 发电机参数匹配
选择3.5kW发电机,充电时间约为45分钟。
2.4校核计算
2.4.1轴荷校核
混合动力汽车改制增加了电机、电池及相关附件重量,减掉原车分动器,可认为分动器与电机及减速装置等重,因此增加电池重量和电机控制器重量,且分布在后轴上方,按10A·h、288V计算,电池质量为60kg,电机控制器质量为15kg。轴荷变化见表6。
2.4.2传动轴及半轴转矩校核
改装后的前后轴传递转矩均小于原车,所以原车传动轴和半轴可延用见表7。

表6 载荷校核
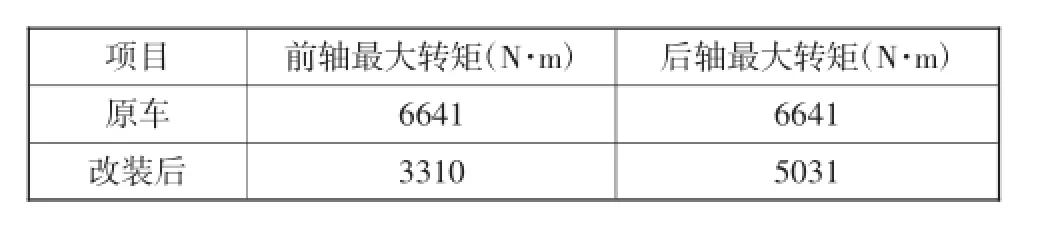
表7 传动轴校核
3 仿真分析
电机的可驱动车速范围为0~40km/h。轴间耦合四轮驱动,可通过控制电机驱动力实现轴间驱动力分配功能,从而实现牵引力控制,有效防止车轮发生滑转,最大程度利用地面附着力,改善低速越野性能,包括整车通过低附着路面的能力和爬坡能力。
混合动力模式下,可将发动机控制在其经济转矩曲线附近运行,通过电机的削峰填谷作用实现较好的燃油经济性。
改装前后加速时间分析见图9。
原车加速时间为两驱时取得,0~100km/h为23.28s,改装后四驱模式下,低速电机参与助力,0~100km/h加速时间为20.79s,较原车有所改善。

图9 加速时间仿真
改装前后最高车速均为142km/h,改装后最大爬坡度为60%。
综合以上计算,性能匹配结果如表8所示。

表8 性能匹配结果
4 结论
按照动力性和经济性要求设计轴间耦合越野汽车混合动力方案,通过对驱动电机、动力电池、发电机等进行参数匹配和部件选型,以及对轴荷、传动轴和半轴转矩进行校核,仿真结果表明设计方案满足改制要求,增强了动力性和通过性,同时提高发动机的工作效率和能量利用率,达到一定的经济性。
1陈家瑞.汽车构造(第五版)[M].北京:人民交通出版社,2006
2余志生.汽车理论(第五版)[M].北京:机械工业出版社,2009
3胡骅.电动汽车(第二版)[M].北京:人民交通出版社,2006
4阿尔弗雷德·克拉普尔.起动机-发电机一体化技术(ISG)[M].北京:北京理工大学出版社,2008
5黄永安.MATLAB7.0/Simulink6.0建模仿真开发与高级工程应用[M].北京:清华大学出版社
4WDHEV Powertrain System M atching Research
W ang Huijing,M a Zhongm in,Hu Dongfang,GuoW anchao
Beijing Automotive Technology Center(Beijing,101300,China)
A parallel cross-axis 4WD HEV based on the conventional 4WD vehicle is developed by removing the power divider,adding the drive motor,power battery etc.Applying MATLAB to achieve powertrain optimization design and thematching calculation,through axles load torque analysis,the hybrid performance scheme is realized.Simulation results show that the research improves the dynamic performanceand economicalefficiency,conforms to the4WDHEV design objects.
4WDHEV,Cross-axis,Powertrainmatching,MATLAB simulation
U469.3
A
2095-8234(2015)01-0077-07
王慧晶(1984-),女,高级工程师,硕士研究生,主要研究方向为整车性能研究及混合动力汽车开发。
(2014-12-12)
猜你喜欢
汽车观察(2022年12期)2023-01-17
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
中老年保健(2021年9期)2021-08-24
当代陕西(2021年13期)2021-08-06
当代工人(2020年1期)2020-05-11
汽车观察(2019年2期)2019-03-15
中国环境监察(2016年11期)2016-10-24
通信电源技术(2016年1期)2016-04-16
车迷(2015年11期)2015-08-23
