
一种新超混沌系统的反馈控制方法研究
2015-07-18 11:22:36
西华大学学报(自然科学版) 2015年6期
(电子科技大学数学科学学院,四川 成都 611731)
·机电工程·
一种新超混沌系统的反馈控制方法研究
孙方方,雷银彬
(电子科技大学数学科学学院,四川 成都 611731)
给出一种新的超混沌系统,并对该系统的Lyapunov指数、平衡点和吸引子相图等动力学性质进行分析。当系统取某组参数时,有2个正的Lyapunov指数,进一步说明该系统的超混沌性。利用单一状态线性反馈和错位线性反馈控制方法将超混沌系统的混沌吸引子控制到平衡点,通过数值仿真证实该控制器的有效性。
超混沌系统;Lyapunov指数;反馈控制;稳定性
Lorenz系统是美国科学家E.N. Lorenz于1963年发现的,这是首个在实验的过程中发现的混沌模型[1]。自此之后,人们在该系统的基础上发现了很多新的混沌系统,如Chen系统、Liu系统和Qi系统等[2]。随着新的混沌系统的不断发现和提出,人们对混沌现象的认识和研究也不断地加深,进一步地丰富和完善了混沌理论。超混沌系统是在混沌系统的基础上发展起来的一门学科,它的基本特征和混沌系统相类似。与混沌系统相比较而言,超混沌系统具有2个或2个以上正的Lyapunov指数,且其动力学行为较混沌系统复杂。由于超混沌系统的复杂性,它被广泛用于各个领域且具有非常广阔的应用前景[3-4]。
Liu等在2004年提出一种三维自治混沌系统[5]。本文首先根据已有的三维Liu系统,通过增加一个新的变量和微分方程的方法构造了一个新的超混沌系统,并从系统的吸引子、耗散性、平衡点、Lyapunov指数及Lyapunov维数等方面分析系统的动力学行为,加深了对该超混沌系统的认识。然后利用单一状态线性反馈控制方法对该超混沌系统进行控制,并用Matlab数值仿真证明控制方法使系统达到了稳定状态。
1 新的超混沌系统及其动力学行为
Liu等在文献[5]中提出一种新的混沌系统,其模型可表示为
当a=10,b=2.5,c=40时系统处于混沌状态。
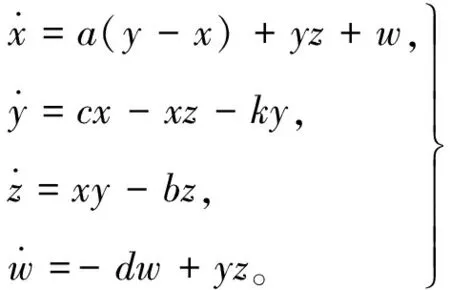
对Liu系统进行变形,结合Lyapunov指数进行验证修改,在第1个等式中增加非线性项yz和反馈控制器w,将第3个等式中的4x2变成xy,最后增加1个关于w的一阶微分方程。由此改造后,得到新超混沌系统的数学模型如下所示:

(1)
其中:x=(x1,x2,x3,x4)T是状态向量;a、b、c为系统参数,随着参数的变化系统产生复杂的动力学行为。
当给出系统(1)中的参数取值为a=19,b=8,c=42,d=2时,利用Matlab程序设计计算出系统的Lyapunov指数为L1=9.23、L2=3.29、L3=-9.69、L4=-31.84,其中有2个正的Lyapunov指数,且所有的Lyapunov指数之和小于零。系统的Lyapunov维数为

由此可知,它满足产生超混沌的几个必要条件[5],因此系统(1)处于超混沌状态。
2 系统(1)的动力学特性
2.1系统的混沌吸引子图
在系统(1)中,为了展示它在各个平面的状态,当a=19,b=8,c=42,d=2时,取初值(x0,y0,z0,w0)=(-1,0,1,1),通过计算机仿真可得系统(1)的超混沌吸引子及其在部分平面的投影(如图1所示)。

(a)xyz平面相图
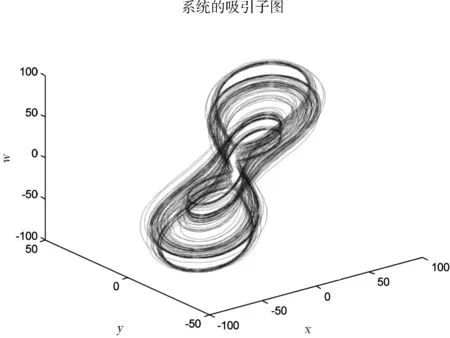
(b)xyw平面相图
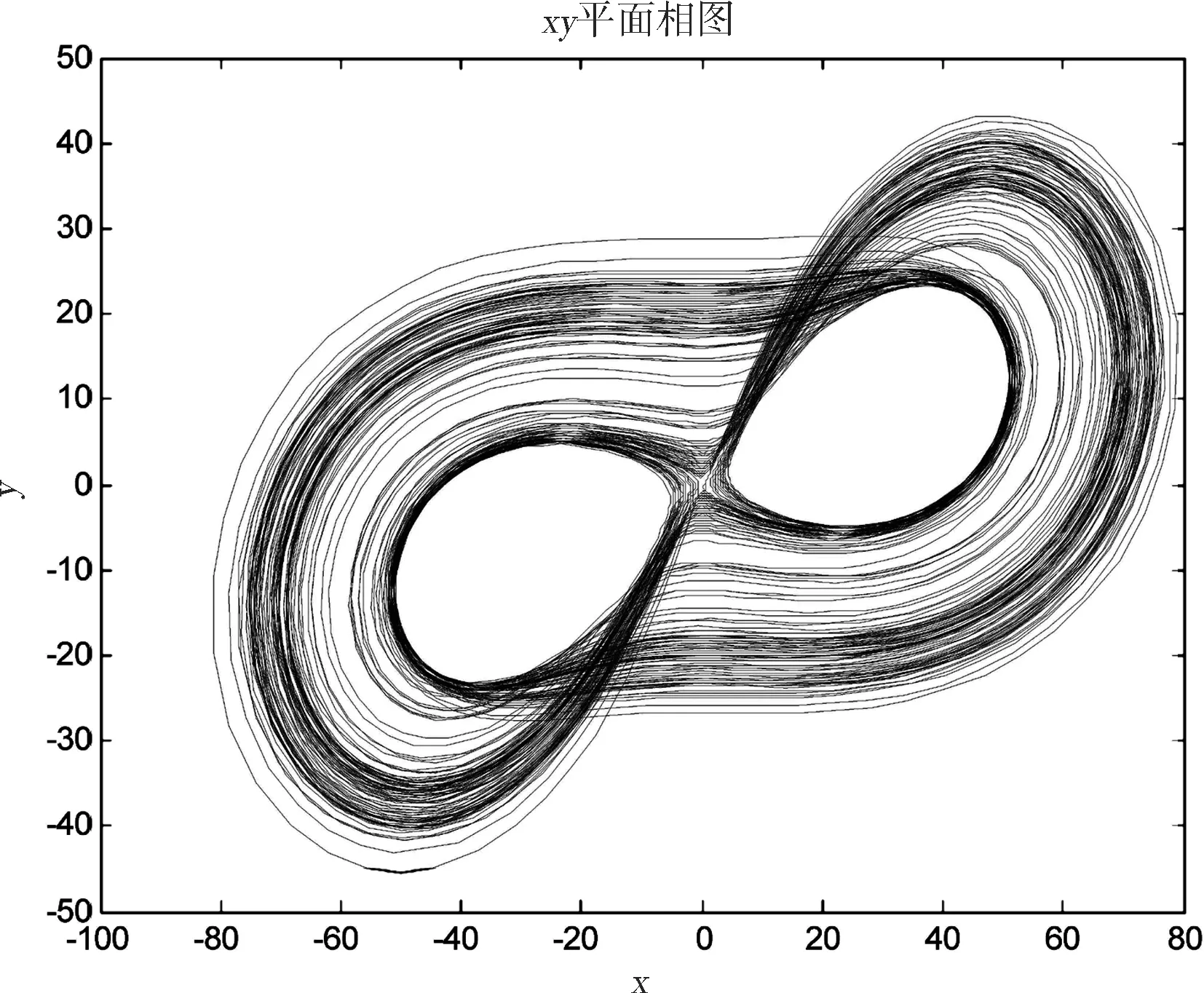
(c)xy平面投影

(d)xz平面投影

(e)yz平面投影
(f)zw平面投影
2.2对称性和不变性
为了研究其不变性,将系统(1)经变换S:(x,y,z,w)→(-x,-y,z,-w)作用,可知系统变换前后是相同的,即系统(1)关于z轴对称,且这种对称性对于所有的参数值都成立。
2.3耗散性和吸引子的存在性
梯度公式是判断系统是否为耗散的重要依据[6],系统(1)的梯度为

2.4平衡点和稳定性
系统(1)的平衡点满足方程

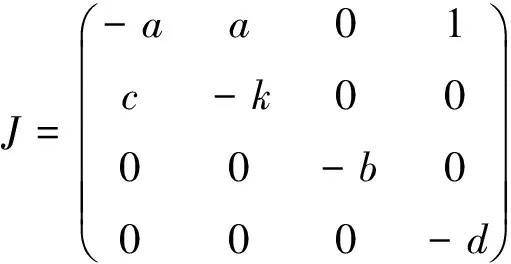
由此可求给定参数意义下的平衡点为S0(0,0,0,0),S1=(±8.8,±38.1,42,±800)。在平衡点S0处,其雅各比矩阵为


由于系统(1)为对称的,所以S1和S2两个平衡点有相似的稳定性,在此我们只考虑S1的稳定性。系统(1)在平衡点S1处的Jacobian矩阵为


3 反馈控制方法及数值仿真
在系统(1)的每项添加外部控制输入ui(i=1,2,3,4),则得到新的系统为
(2)
3.1单一反馈控制方法
在系统(2)中,令u1=0,u2=-ky,u3=0,u4=0;其中k反馈系数[9]。那么新系统(3)为
(3)
系统(3)的Jacobian矩阵为
则矩阵的特征方程为
(λ+d)(λ+b)[λ2+(a+k)λ+a(k-c)]=0。
当a+k>0且a(k-c)>0,即k>c时,由特征方程解出来的特征根λ的实部均为负的[10]。根据Routh-Hurwitz判定依据可知,取参数为a=19,b=8,c=42,d=2时,系统(3)在平衡点S0(0,0,0,0)处为稳定的。用Matlab程序画图给出了k=50时被控制各变量的稳定轨迹,如图2、图3所示。
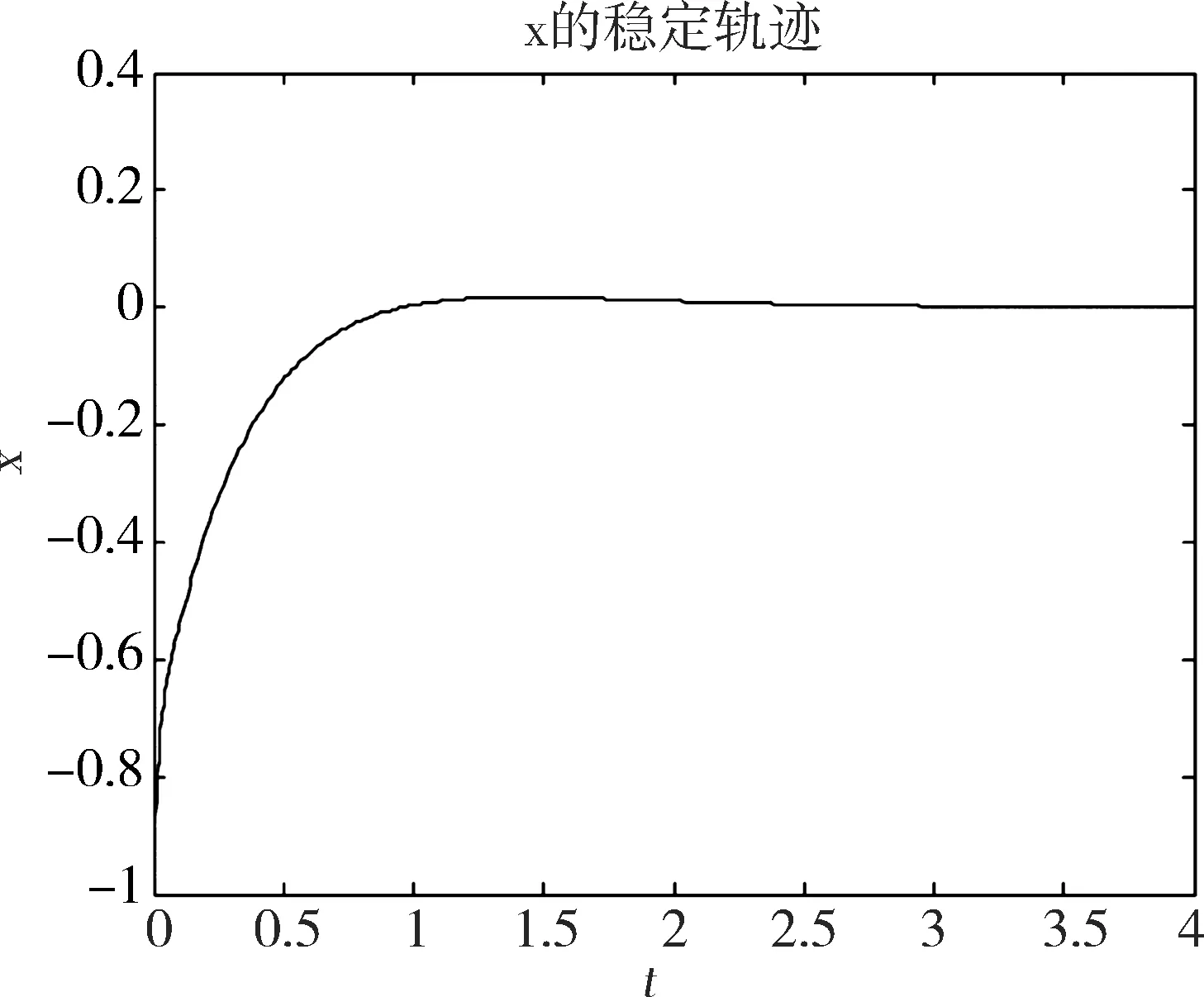
(a)x的稳定轨迹
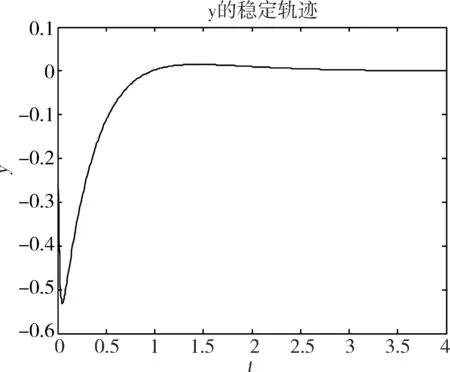
(b)y的稳定轨迹
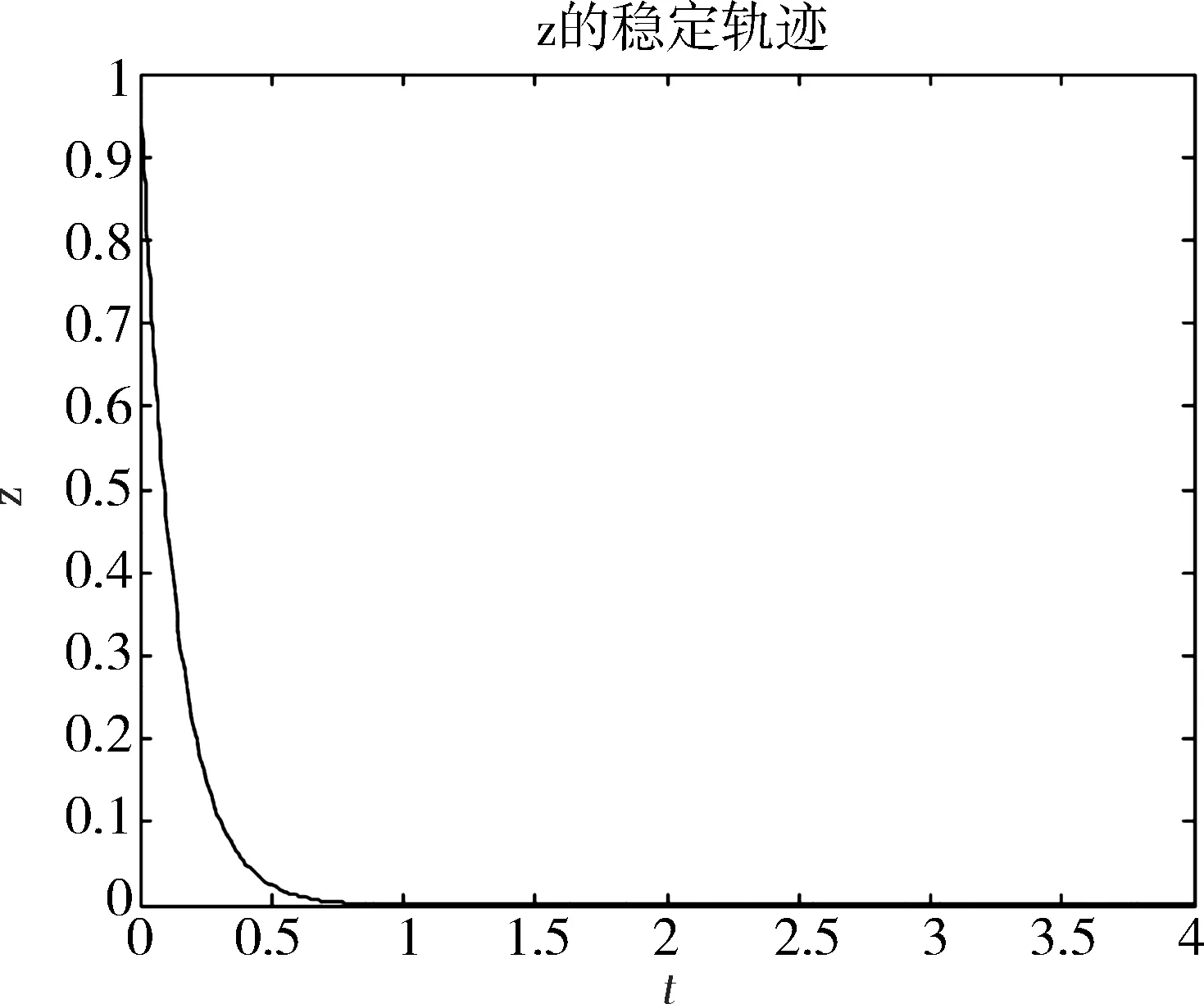
(c)z的稳定轨迹

(d)w的稳定轨迹

(a)x的稳定轨迹
(b)y的稳定轨迹
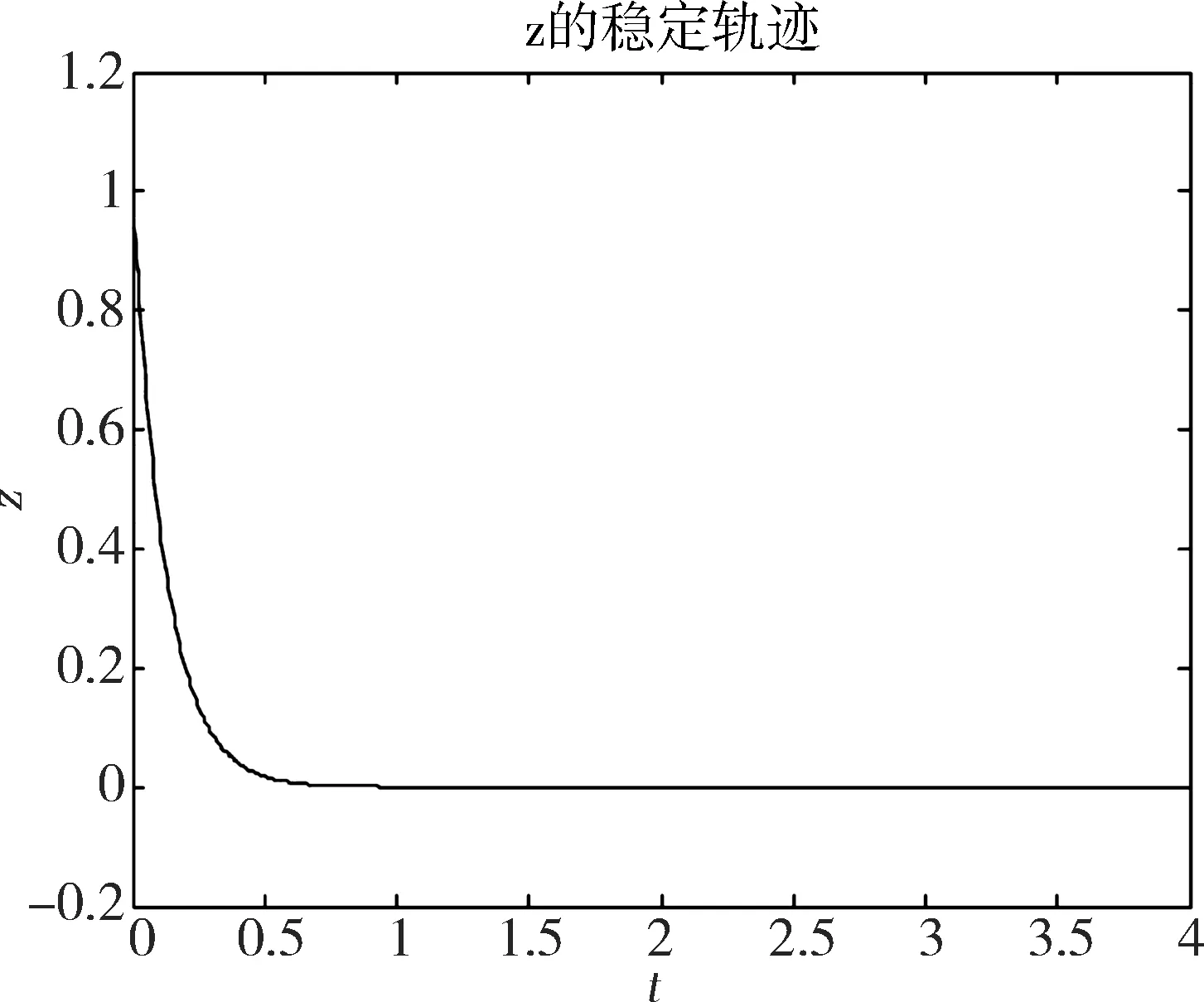
(c)z的稳定轨迹

(d)w的稳定轨迹
3.2错位反馈控制方法
在系统(2)中,令u1=-ky,u2=0,u3=0,u4=0,其中k反馈系数。那么系统(2)变为

(4)
系统(3)的Jacobi矩阵为

则矩阵的特征方程为
(λ+d)(λ+b)(λ2+aλ+ck-ca)=0,
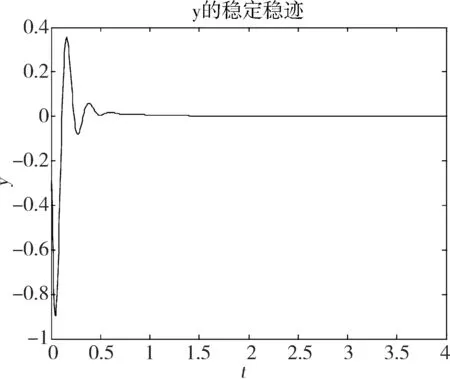
当a>0和ck-ca>0时, 即k>a时,系统(4)的零平衡点局部渐进稳定。若参数取值a=19,b=8,c=42,d=2,当k>19时,零点稳定,其状态变量如图3所示。
4 结论
本文构造了一个新的超混沌系统,并利用Matlab数值模拟分析了该超混沌系统较低维混沌系统更为复杂的动力学行为,进而证实了其较高的保密性,在通信保密方面有实际的用途[11-12]。利用线性反馈控制方法,设计了简易的控制器将系统的运动轨迹控制到了不稳定的平衡点处,数值仿真结果表明运用该方法对此超混沌系统控制效果较好,且设计简易,用时较短。
[1]Lorenz E N. Deterministic Non-periodic Flows[J]. J Atmos Sci, 1963, 20(11): 130-141.
[2]王海鹰, 李祖枢, 龙菊舒. 一类三维动力系统的同步控制与仿真[J]. 计算机工程与应用, 2012, 48(7):217-218.
[3]刘明华, 冯久超. 一个新的超混沌系统[J]. 物理学报, 2009, 58(7):4457-4462.
[4]禹思敏.混沌系统与混沌电路:原理、设计及其在通信中的应用[M].西安:西安电子科技大学出版社,2011.
[5]Liu Chongxin, Liu T, Liu L, et al. A New Chaotic System [J].Chaos,Solitons and Fractals,2005,23:1671-1682.
[6]Zhenya Y. Controlling Hyperchaos in the New Hyperchaotic Chen System[J]. Applied Mathematics and Computation, 2005, 168(3):1239-1250.
[7]高智中, 王颖. 一个新超混沌系统及其反馈控制[J]. 数值计算与计算机应用, 2012, 33(3):167-172.
[8]Wei Zhouchao, Wang Rongrong. A New Finding of the Existence of Hidden Hyperchaotic Attractors with No Equilibria[J]. Mathematics and Computers in Simulation, 2014, 13(23):10-24.
[9]Dou Fuquan,Sun Jianan, Duan Wenshan. Controlling Hyperchaos in the New Hyperchaotic System[J].Communications in Nonlinear Science and Numerical Simu-lation,2010,14:552-559.
[10]Yu Haojie, Cai Guoliang. Dynamic Analysis and Control of a New Hyperchaotic Finance System[J]. Nonlinear Dyn, 2012, 67(7):2171-2182.
[11]陈关荣,吕金虎.Lorenz系统族的动力学分析:控制与同步[M].北京:科学出版社,2003.
[12]王波,陈永强,卜云,等.一种新型混沌保密通信系统方案设计[J].西华大学学报:自然科学版,2013,32(1):93-96.
(编校:叶超)
ResearchontheFeedbackControlofaNovelHyperchaoticSystem
SUN Fang-fang,LEI Yin-bin
(SchoolofMathematics,UniversityofElectronicScienceandTechnologyofChina,Chengdu611731China)
A novel hyperchaotic system is reported in the paper, and the Lyapunov exponents, equilibrium, phase diagram and other dynamic behaviors of the system are analyzed. When the system is set up with certain parameters, it has two positive Lyapunov exponents, which further shows the system is hyperchaotic. Ordinary feedback control and dislocated linear feedback control are used to suppress hyperchaos to the unstable equilibrium. Numerical simulations results show the effectiveness of the proposed controller.
hyperchaotic system; Lyapunov exponent; feedback control; stability
2014-05-17
孙方方(1989—),女,硕士研究生,主要研究方向为混沌判定及控制。
TN7
:A
:1673-159X(2015)06-0027-05
10.3969/j.issn.1673-159X.2015.06.006
猜你喜欢
数学物理学报(2021年1期)2021-03-29 03:14:42
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
烟台果树(2019年1期)2019-01-28 09:34:58
传媒评论(2018年7期)2018-09-18 03:45:52
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
