基于FPGA和DSP的非相似双余度数字式前轮转弯控制盒设计
2015-07-18 11:22
西华大学学报(自然科学版) 2015年4期
(四川凌峰航空液压机械有限公司,四川 广汉 618300)
·机电工程·
基于FPGA和DSP的非相似双余度数字式前轮转弯控制盒设计
詹 翔
(四川凌峰航空液压机械有限公司,四川 广汉 618300)
为防止相似余度系统的共性故障雪崩式损害的发生,设计了一种非相似双余度数字式前轮转弯控制盒。该控制盒由FPGA控制器和DSP控制器组成。通过运用FPGA,减少了器件数量,提高了产品集成度和可靠性;通过FPGA控制器与DSP控制器的数据交换和同步输出,避开了因非相似软件不同而带来的设计难点,降低了开发难度和成本。该设计中的数据交换和同步运行设计方法与技巧,为其他控制盒的设计提供了参考。
FPGA;控制器;非相似;双余度
数字式电传前轮转弯防摆系统(以下简称转弯系统)主要用于对飞机地面滑行阶段的方向控制,防止前起落架出现摆振。当前转弯系统大多采用DSP作为主控制器控制前轮转弯。其软件是串行运行,执行速度和效率较低,有时甚至会出现程序跑飞、死循环、复位不可靠等缺陷[1]。为此,本文采用FPGA作为主控制器,各功能由硬件并行处理。这既提高了执行速度和效率又提高了软件的可靠性。
1 转弯系统
转弯系统一般由指令传感器、控制盒、组合液压阀、执行机构和反馈传感器等组成,如图1所示。飞机在地面滑行阶段,轮载开关接通,驾驶员按下转弯开关,控制盒收到轮载信号和转弯信号后,接通电磁阀和伺服阀控制回路,控制转弯系统进入转弯状态。此时驾驶员蹬动脚蹬或操纵手轮,通过指令传感器发出前轮转弯指令信号,控制盒根据装在执行机构或前轮上的反馈传感器获得前轮实际转角并与指令信号比较。根据飞机实际控制律,控制伺服阀开口方向和大小,进而驱动执行机构动作,保证飞机正常转弯,同时控制盒通过总线和开关信号向机上其他设备上报工作状态。当转弯系统检测出故障时,控制盒立即关断电磁阀和伺服阀控制回路,使转弯系统处于防摆状态,并上报故障信号。当轮载开关和转弯开关任一未接通时,转弯系统处于防摆状态。

图1 前轮转弯系统框图
2 控制盒方案选择
目前控制盒都采用双余度设计。由于相似余度系统采用完全相同的硬件和软件组成,无法抗拒共性故障的雪崩式损害,因此在对产品可靠性要求越来越高的情况下,采用非相似余度可减少余度通道之间遭受共同故障而同时丧失功能的概率。
在非相似双余度中,大多采用数字式控制器和模拟式控制器组成的控制盒。采用模拟式控制器由于无法自动将转弯系统中传感器电气零位与飞机操纵装置和前轮机械中位校准,需人工调整传感器来实现,加大了系统维护工作量,且无法在两余度通道间进行数据交换;采用DSP控制器和CPU控制器组成的控制盒,由于非相似软件采用不同的程序语言,使用不同的开发工具,并由不同的设计人员完成,加大了开发难度和成本。
3 控制盒硬件设计方案
控制盒接受驾驶员发出的转弯控制指令和反馈传感器反馈的前轮位置,经计算处理后控制组合液压阀驱动执行机构运动,进而控制前轮转弯。控制盒是转弯系统的核心部件,一般由电源板、控制器A板、控制器B板、接口板(可集成在母板上)、母板组成。本文提出一种由FPGA和DSP为控制器的热并行运行方式(全部(N个)余度通道均在执行同一任务的热运行之中,即2个余度通道同时完成相同的转弯控制和故障检测)的故障─安全策略的非相似双余度控制盒设计方案。
为满足非相似性,2个余度通道采用不同的工作原理、不同的线路、不同的元器件而设计的硬件,因此:对外部开关量和控制信号的输入输出,FPGA控制器使用光耦,DSP 控制器选用固态继电器隔离转换;对A/D采集通道,FPGA控制器选用单独的多路选通器和数据并行输出的A/D芯片, DSP控制器选用自带多路选通器且数据串行输出的A/D芯片,且模拟量电压分别调整为0~10 V和0~5 V采集,这样保证了A/D采集通道从电压调整到采集的硬件电路和数据传输的不同;对D/A输出通道,FPGA控制器选用电流输出型D/A芯片,DSP控制器选用电压输出型,进而对应的后端驱动电路也将不同;对总线通信,FPGA控制器使用IP软核加高速光耦实现总线通信功能,DSP控制器选用专用的总线芯片实现;对内部二次电源,选用不同厂家的电源芯片。FPGA通过VHDL硬件描述语言实现其内部硬件功能划分,是基于全硬件的处理方式,而DSP是通过软件编程实现内部功能;因此,FPGA和DSP的运行处理原理不同。按上述要求设计的双余度控制盒在硬件上能满足非相似性硬件设计要求,且FPGA无软件,因此避免了非相似设计中非相似软件的设计难点。
4 基于FPGA的控制器设计
控制器是控制盒内的核心部件,控制盒的功能都必须通过控制器实现,并且直接决定控制盒的性能。
4.1 FPGA控制器的组成
基于FPGA的控制器原理框图如图2所示。整个电路主要由FPGA芯片区[2-4](含FPGA逻辑运算中心、A/D控制采集单元、开关量处理单元、D/A控制输出单元、总线通信单元、双口通信控制单元)、模拟量滤波放大电路、多路选择与A/D采样电路、D/A转换与驱动电路、光耦隔离与驱动电路、存储电路、双口、总线、时钟、电源等几部分组成。
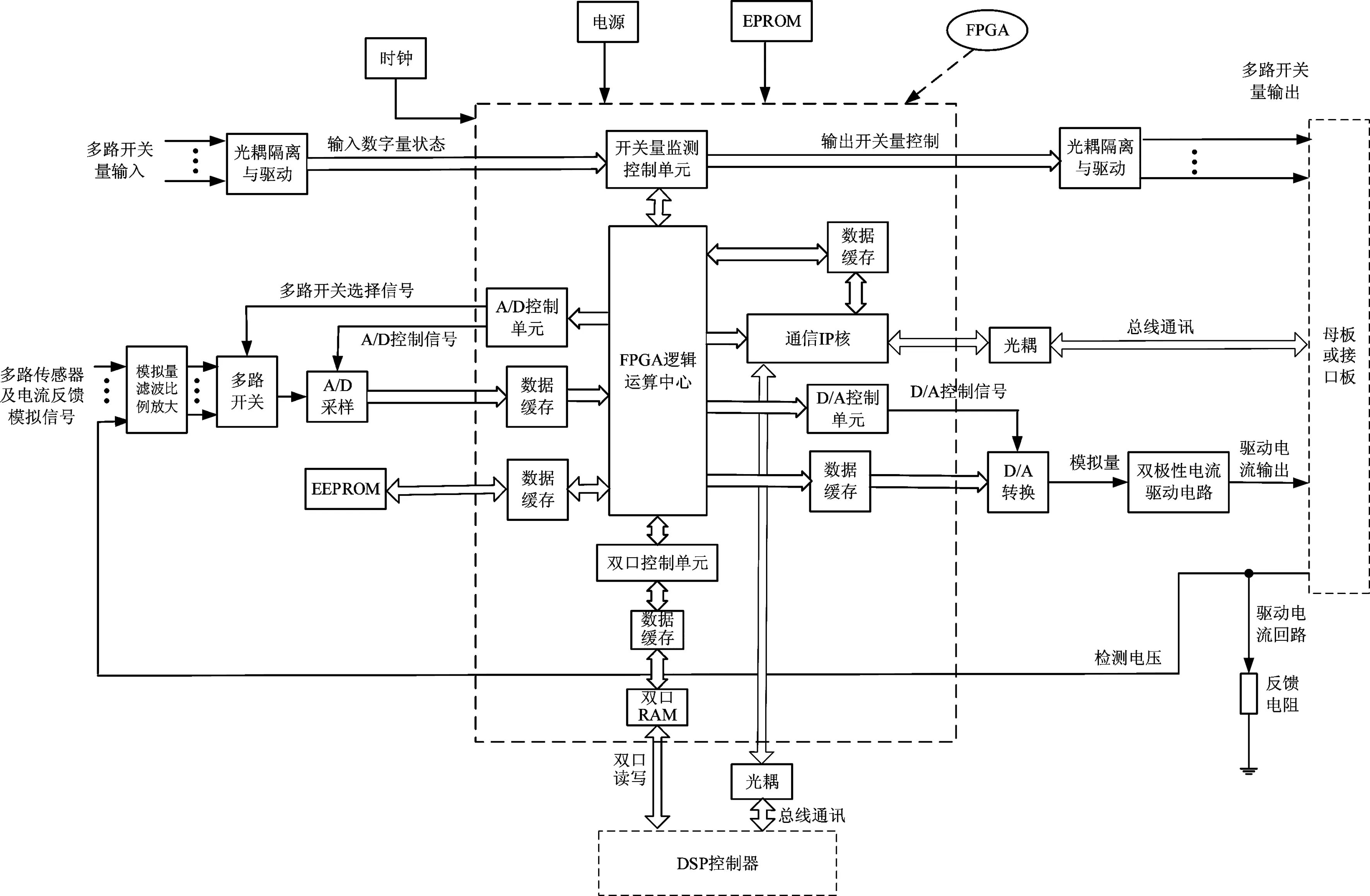
图2 FPGA控制器原理框图
4.2 FPGA逻辑运算中心
FPGA逻辑运算中心根据接收到的开关量信号、总线信号判断转弯系统运行状态,并控制转弯系统工作,同时将处理后的转弯系统状态信息通过开关量和总线上报。在转弯状态时,根据收到A/D采样后的数据,按控制律计算后,接通伺服阀、电磁阀和转弯指示信号,并将控制伺服阀输出的数据送D/A转换成控制电流,控制前轮转弯;在防摆状态时,关断伺服阀、电磁阀和转弯指示信号,使转弯系统处于防摆状态;飞机停止在地面,转弯系统机械部件处于中位时,收到零位采集指令后,采集当前的指令传感器和反馈传感器的数据,并自动存入控制器的EEPROM中作为系统的电气零位;飞机停止在地面,收到维护指令后,自检测转弯系统各部件是否工作正常,并能查看系统故障信息,方便故障定位;实时地通过比较监控和自监控2种方式检测转弯系统工作健康状态,并将故障信息存入EEPROM中,方便维护自检时调用系统故障信息。为实现FPGA逻辑运算中心的各种功能,需要并行运行防摆功能模块、转弯功能模块、零位采集功能模块、维护功能模块、BIT检测功能模块。FPGA逻辑运算中心工作流程如图3所示。
4.3 FPGA并行处理设计
1938年10月,毛泽东总结了全国抗战以来15个月的经验,明确指出:“改良人民群众生活问题,过去实行的太微弱了,因此不能激发广大人民的抗战热忱,对坚持长期抗战是非常不利的。”[2]131他认为实行各项改善民生的政策是今后全民族当前的紧急任务。1939年2月,毛泽东在《在延安党政军生产动员大会上的讲话》中,肯定了边区生产运动在支前和改善人民生活中的成绩,明确指出:“如果全国都像边区一样的做起来,这就是全国物力动员起来了,果如此,则‘抗战必胜,建国必成’就会成为现实了。”[2]138
为发挥FPGA并行处理能力,缩短FPGA逻辑运算中心等待A/D模拟量采集、D/A控制输出、总线数据传输、双口数据传输的时间,将A/D控制采集单元、D/A控制输出单元、总线通信单元和双口通信控制单元设计成各自独立运行单元,且在FPGA中划分大量数据缓存模块,并在数据传输过程采用乒乓传输结构,以消除数据传输的等待时间,正真做到数据采样和数据处理的并行运行。
4.4冗余设计
为保证FPGA运行的可靠性,用专用的TMRTool冗余生成工具[5],将所有的HDL和综合器件自动地生成3倍模块冗余,提高FPGA控制器的可靠性和安全性。
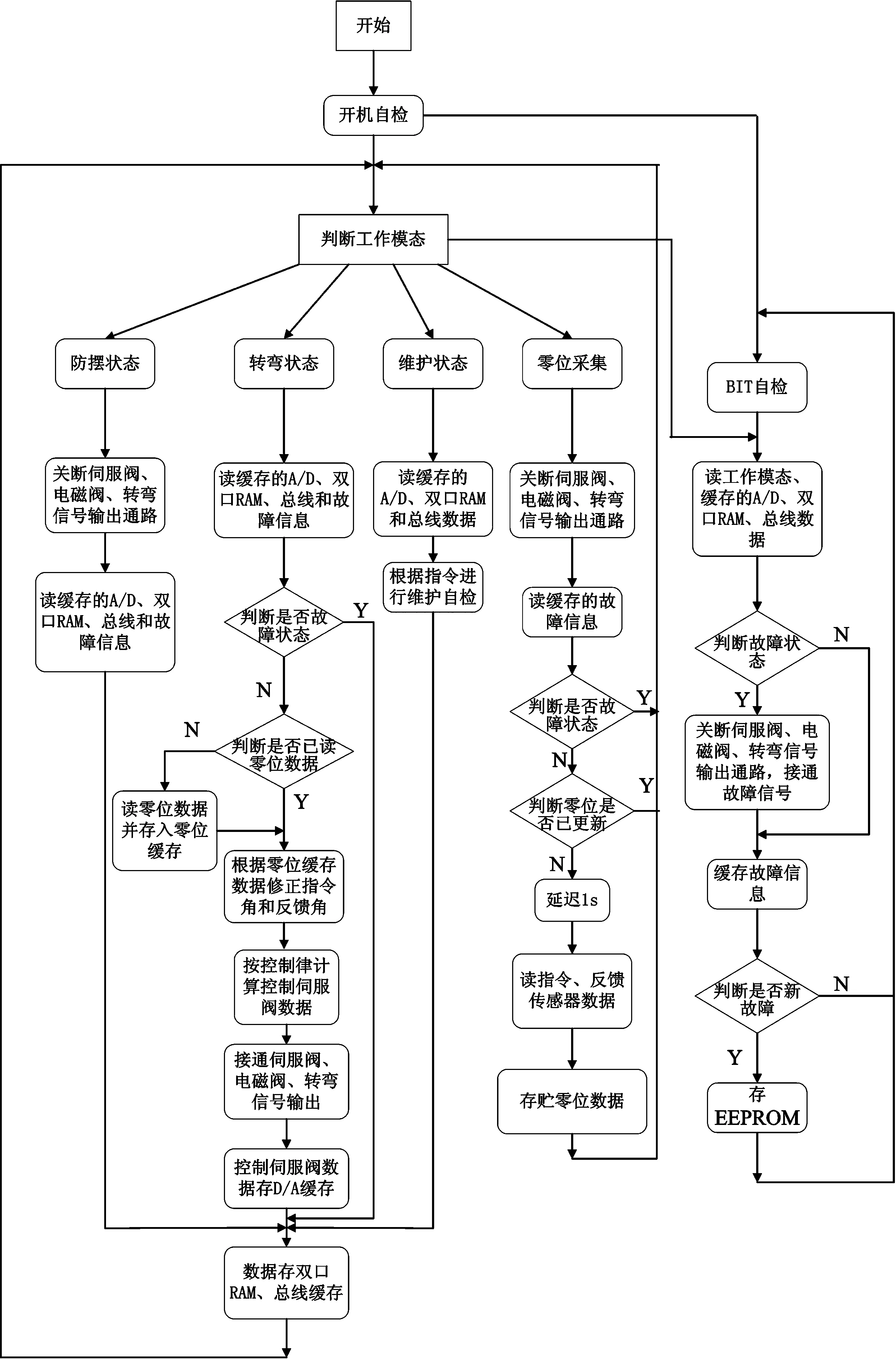
图3 FPGA逻辑运算中心工作流程框图
5 FPGA控制器与DSP控制器的数据交换与同步输出
5.1 FPGA控制器与DSP控制器数据交换
FPGA控制器与DSP控制器数据交换是同时通过双口和总线进行通信完成的。
总线通信单元负责与机上其他设备、地面维护计算机进行通信及两控制器间数据传输交换。FPGA通过数据缓存模块完成存储待发送和接收到的信息;通信IP核,用VHDL等硬件描述语言描述的各种现成的总线功能软核,实现总线协议的逻辑控制。通过光耦将FPGA输出的TTL电平转换为总线实际需要的电平,同时,通过光耦也能将总线信号转换为FPGA能接收的TTL电平信号。
双口控制单元用于实现FPGA控制器和DSP控制器之间数据传输。通过对FPGA内部自带RAM配置,生成双口RAM。通过DCM时钟管理器对FPGA时钟进行分频,生成周期时序信号(25 ms/50 ms),并引入DSP控制器中断中。DSP控制器收到中断信号后,立即读取双口RAM,并将要传给FPGA控制器的数据写入双口,随后向FPGA发送一个触发信号。FPGA控制器在收到触发信号后立即读取双口RAM数据,并将数据缓存模块中待发送给DSP控制器的数据写入双口。如此FPGA控制器就完成了同DSP控制器之间的数据交换。
5.2控制伺服阀电流同步输出
为实现FPGA控制器和DSP控制器同步输出控制伺服阀电流,可在FPGA控制器中生成一个周期时序信号(如:5 ms、10 ms),当FPGA控制器中D/A控制输出单元被周期时序触发后,立即将控制伺服阀电流信号经D/A转换输出;将周期时序引入DSP控制器中断,则DSP控制器收到周期时序信号后,程序立即跳转到中断程序将控制伺服阀电流信号经D/A转换输出。通过FPGA产生的周期时序信号即可满足控制伺服阀输出的同步。
6 实验验证
用Xilinx公司的XQ2V1000[6]和TI公司的TMS320F2812组成的非相似双余度控制盒原理样件,替换X型机前轮转弯防摆系统采用TMS320F2812组成的相似双余度控制盒后,进行了控制律检查、BIT检测、转弯系统最大输出速度检测等试验。其结果表明,基于FPGA控制器和DSP控制器组成的非相似双余度控制盒的转弯操纵、故障检测等指标满足系统性能要求。
7 结论
本文设计了一种基于FPGA控制器和DSP控制器的控制盒以实现前轮转弯,避开了非相似系统中非相似软件的设计难点,通过FPGA的运用减少了器件数量,提高了产品集成度和可靠性。
[1]董旭.基于FPGA的控制器实现[D].上海:同济大学,2005.
[2]张学强,秦龙勇,谢拴勤.基于FPGA的多路模拟量、数字量采集与处理系统[J].单片机及嵌入式系统应用, 2003(4):63-67.
[3]叶凯. 基于FPGA和LabVIEW的双通道示波器设计[J]. 西华大学学报:自然科学版,2012,31(5):22-24.
[4]陈永强,雷雨. 可变长移位寄存器在高速数据采集中的应用与FPGA实现[J]. 西华大学学报:自然科学版,2013,32(4):61-63.
[5]Xilinx Inc. XILINX TMRTOOL[EB/OL].[2014-06-03]. http://www.xilinx.com/publications/prod_mktg/XTMRTool_ssht.pdf.
[6]Xilinx Inc. QPro Virtex-II 1.5V Military QML Platform FPGAs [EB/OL]. [2014-06-03].http://china.xilinx.com/support/documentation/data_sheets/ds124.pdf.
(编校:饶莉)
ADesignofDissimilarDualRedundancyDigitalSteeringControlBoxBasedonFPGAandDSP
ZHAN Xiang
(AVICSichuanLingFengAviationHydraulicCo.Ltd.,Guanghan618300China)
In order to prevent the similar redundant system occurring common fault avalanche damage, the dissimilar dual redundancy digital steering control box is designed. The control box is composed of FPGA controller and DSP controller. Through the use of FPGA , the device number is simplified, and the product integration and reliability are improved. Through FPGA and DSP controller of data exchange and synchronization output, the design difficulties due to the different and similar software is avoided, the development difficulty and cost are reduced. Method and skill of the presented data exchange and synchronous operation provide a new idea for the design of the control box.
FPGA; the control box;dissimilar;dual-redundancy
2015-04-29
詹翔(1981—),男,工程师,学士,主要研究方向为飞机电传前轮转弯防摆系统。E-mail:zhanxiang_001@163.com
TP273
:A
:1673-159X(2015)04-0032-05
10.3969/j.issn.1673-159X.2015.04.007
猜你喜欢
科技与创新(2021年2期)2021-01-29
小学生学习指导·爆笑校园(2019年6期)2019-09-10
西北工业大学学报(2018年4期)2018-09-07
电子制作(2018年11期)2018-08-04
汽车技术(2018年1期)2018-02-05
舰船科学技术(2017年11期)2017-11-27
红蜻蜓·低年级(2015年11期)2016-02-02
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
中国自行车·骑行风尚(2014年4期)2014-10-10