
智能小车目标识别跟踪系统的设计
2015-07-18 00:53张岚
中国新技术新产品 2015年22期
张 岚
(广东省高级技工学校,广东 惠州 516100)
智能小车目标识别跟踪系统的设计
张 岚
(广东省高级技工学校,广东 惠州 516100)
随着经济水平的飞速发展和科学技术的不断提高,电子设备的智能化将成为当今时代的发展趋势。本文首先介绍了智能小车目标识别跟踪系统的组成,在此基础上详细介绍了智能小车对目标的识别以及跟踪系统的设计。
智能小车;识别;追踪
随着科学技术在工业智能控制领域的不断应用,对特定目标的识别和跟踪技术日渐趋近成熟。通过使用单片机、ARM等高速控制芯片对车载摄像模块进行配置,即可实现图像的快速捕获;再将捕获的图像信息通过无线通讯的方式传送到计算机,对其进行信息处理和判断,即可判定出小车的运动方向。此过程实现了通过无线通讯的方式下发运动方向指令,从而达到对特定目标的识别和跟踪的目的。
1 智能小车识别跟踪系统组成
系统主要由智能小车(包含摄像头模块)、数据收发终端和计算机三个部分组成。其中,智能小车和数据接收终端采用2.4GHz的无线进行通讯,数据收发终端采用网口和计算机进行通讯,计算机上安装有C++开发的图像处理和控制界面。智能小车识别跟踪系统结构示意图如图1所示。
1.1 智能小车通讯模块
目前无线通讯模块有很多,如红外、蓝牙、Zigbee和NRF24L01的无线模块等几种。红外技术:红外是家庭无线控制网络可以选择的一个技术,设备简单,价格低廉,很容易推广。由于波长短,障碍物衍射能量差,必须使控制器和接收机在可视范围内,并且通信角度不大于35°。另外一个特点是通信距离短,一般最大10m,因此,这种模式仅适用于点对点的沟通、无障碍、短距离,不容易建立广泛的家庭通信网络。蓝牙技术:蓝牙技术是一种低成本,短距离,点对点和点对多点通信的技术,支持无线通信技术。蓝牙技术的主要目的是交换数据和语音信号,传输协议过于复杂,芯片成本较高。ZigBee技术:ZigBee是一种短距离、低功率、低速率、低成本的无线通信技术,通讯距离几百米内。以上几种通讯方式都不适合在本设计系统中使用,小车控制系统选择NRF24L01无线模块,此模块功耗低,价格便宜,传输距离最大可以达到2000米,控制器通过串口和模块间进行通讯,实现无线传输功能。
1.2 智能小车图像采集和控制模块
控制芯片选用ST公司的STM32F407,它工作主频可达168MHz,自带摄像头接口,便于外部扩展,内含6个串口,通讯速率最高可达10.5Mbit/s,利用这样的高速串口完全可以实现数据的实时传输。摄像头模块采用OV7620,它的工作电压支持3.3V和5V,每秒可以产生60帧格图像,有效分辨率为640×480,能够很好的满足设计智能小车对图像采集的要求。小车的运动控制通过步进电机的驱动来完成,当小车接收到计算机发来的动作命令,单片机通过控制前后电机的动作实现小车移动。控制前端的两个电机可实现小车左右动作,控制后端的两个电机可实现小车前后动作。
1.3 数据收发终端
数据收发终端的功能是接收智能小车发送的数据,并完成和电脑之间的信息传输。电脑和终端之间可以采用CAN通讯、485通讯、串口通讯和网口通讯。其中CAN和485都需要中间的转接板,串口通讯虽然不需要转接,但通讯速率和通讯的稳定性不能保证,而网络通讯具有接入点方便、传输稳定、便于扩展等优点,由此看来网络通讯非常适合在本系统中使用。网络通讯芯片选择W5500,它和控制器间采用SPI方式,操作间便于编程和硬件设计。
1.4 数据图像处理和动作控制模块
系统中数据图像处理的功能利用计算机实现,计算机通过接收智能小车采集的图像数据进行分析,将图像转换成白色和黑色两种颜色,利用数学算法和软件编程完成对特定目标的识别和跟踪。运动控制模块的四个步进电机分别控制小车的前、后轮动作。硬件电路设计选取ULN2003电机驱动芯片,单片机通过操作IO口的高低电平输出,控制步进电机动作,实现小车向各方向运动的控制。要完成实时的追踪,需要采集图像的清晰。当目标被识别后,进行目标追踪需要控制智能小车和被跟踪目标保持一定的距离,因此,采用超声传感器实现距离的检测。超声波传感器是利用超声波的特性研制而成的传感器。超声传波具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质或分界面会产生显著反射形成回波,碰到活动物体能产生多普勒效应。因此超声波检测非常适合对距离测试。
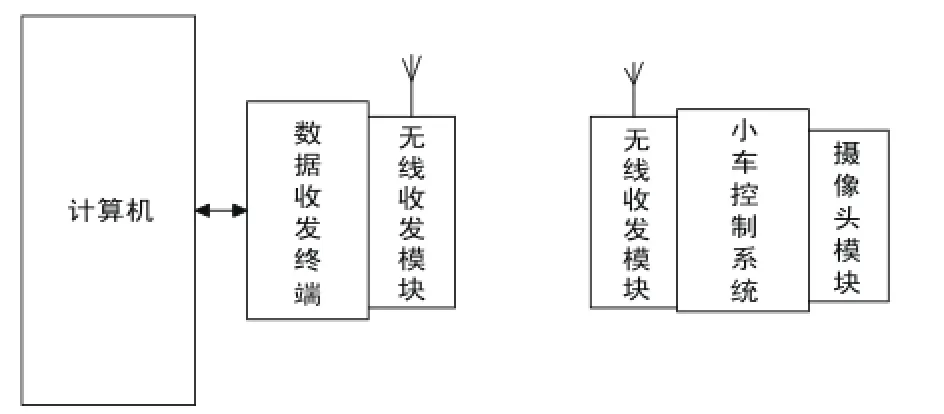
图1智能小车系统组成结构示意图

图2目标识别系统结构图
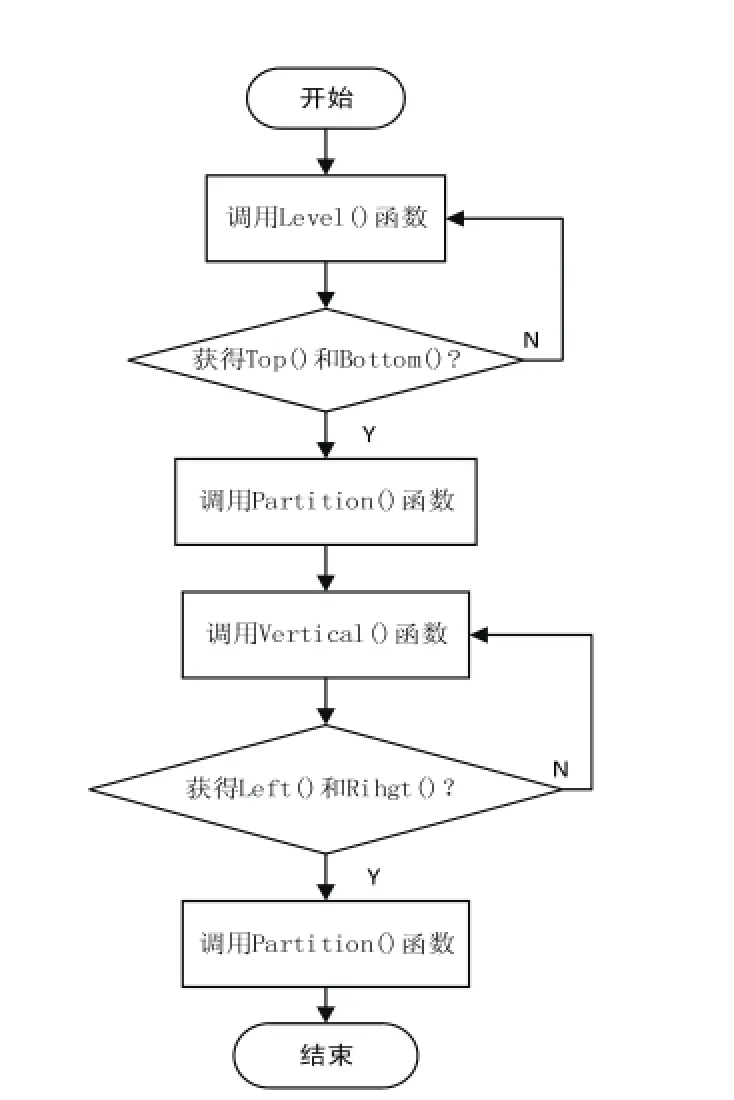
图3 定位流程图
2 目标识别
2.1 目标识别系统结构
目标的识别首先要检测出目标,即判断视频镜头中有无运动目标的出现。如果有运动目标出现,就把它的图像抽取出来,进行二值化处理,然后利用投影法进行投影,经过运算实现对特定目标的识别,系统结构如图2所示。
2.2 目标识别原理
(1)利用摄像头采集图像, 监视特定目标的运动, 定时收集场景信息,将格式刷转化为真彩色位图进行储存,同时调用控件在计算机上实时监控小车的运行情况。
(2)将真彩色位图进行二值化处理后整体的像素会呈现出黑和白两种状态,根据现场环境的光照条件、颜色饱和度和对比度的实际情况进行调整,设置适和的阀值,将被识别目标的图像转换为白色,其它转换为黑色,实现对监测目标的识别。
(3)图像定位法大体上有基于神经网络的图像定位法、基于模板匹配的图像定位法、直线边缘检测法、统计直方图及投影法,以上几种方法中前三种方法计算量很大,而最后一种对噪声特别的敏感,都不能使系统达到最佳的定位效果,故本设计采用投影法来实现对目标的定位。利用水平投影检测待测目标的水平位置,利用垂直投影检测目标的垂直位置,定位流程如图3所示。
3 目标跟踪
对目标的跟踪使用Mean Shift算法实现。它的基本思想是将视频图像的所有帧作MeanShift运算,并将上一帧的结果作为下一帧MeanShift算法的初始值,反复的迭代下去,对采集视频图像进行分析。
3.1 MeanShift算法实现
MeanShift算法首先将图像的矩与直方图反向投影,利用数学公式计算出运动区域的质心;然后根据质心对运动物体中心点进行追踪。
(1)图像的矩与直方图反向投影
图像的矩可以被理解为像素密度,所谓的像素密度就是指图像的颜色数值。在数学领域最常使用的是零阶矩,一阶矩,二阶矩等等,计算方法如下:

计算二值图像的零阶矩:分别计算二值图像x和y的一阶矩:运动区域的质心:
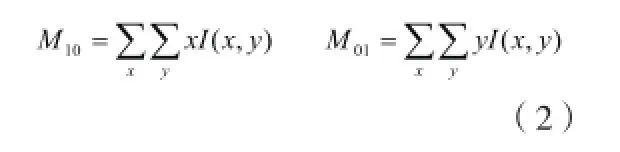

其中,I (x , y)是二值图像中位于( x, y)点的像素值。
(2)中心点追踪
利用图像的矩和给定ROI直方图反向投影信息可以粗略计算出ROI区域的中心点、尺寸等等信息。a ,b ,c代表运动物体的质心,计算公式如下:
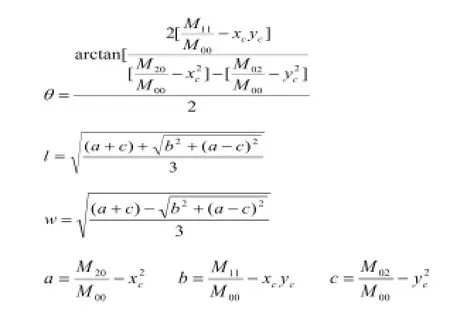

图4 跟踪算法流程图
3.2 智能小车控制算法
在CAMShift的输出数据中获得一个Box数据,根据Box中的尺寸、中心点、旋转角的属性可实现对小车的控制,根据矩形框的面积大小控制小车的直线运行速度,根据矩形中心点和视场中心点的左右偏差大小来计算出偏转角度。
STM32F407对小车的控制采用PID算法。以摄像机视场1/4 的面积作为加减速阈值,以视场1/2的水平处作为左右偏转阈值。将CAMShift的数据结果与阈值相减,计算出控制指令并发送出去。将CAMShift输出的Box的大小与加减速阈值做差值运算,如果差值是正值则发送前进指令,如果差值为负值则发送倒车指令。跟踪算法流程图如图4所示。
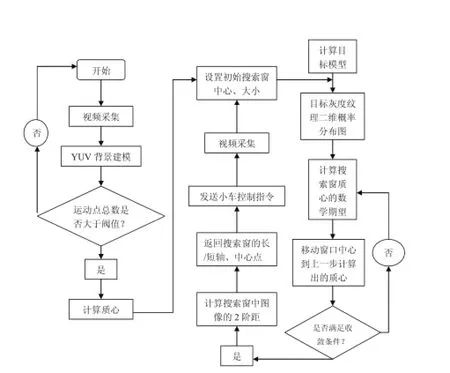
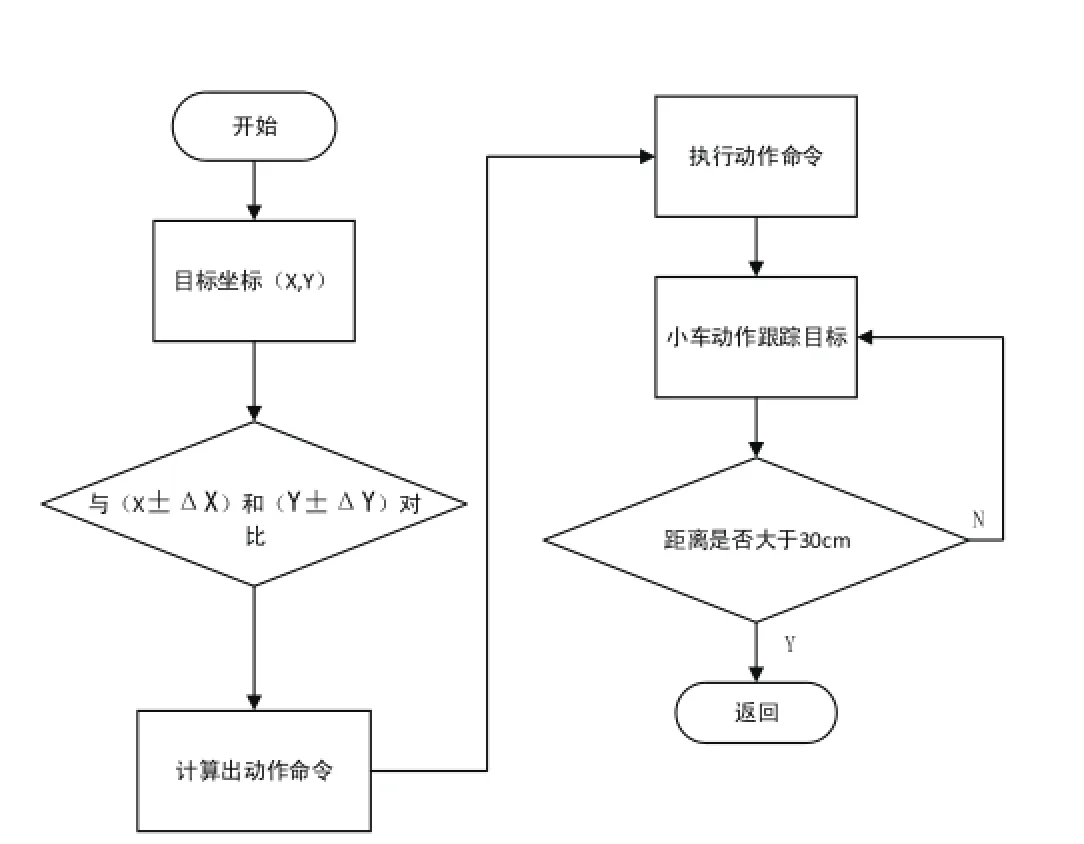
图6 目标跟踪软件实现流程图
3.3 系统算法流程
智能小车目标识别与跟踪系统算法流程如图5所示。系统开始首先对图像进行采集,对采集后的图像进行YUV建模,计算出运动点总数是否大于设定的阀值,如果小于设置阀值,返回,系统重新执行;如果大于设置的阀值,根据3.1中公式计算出运动区域的质心,根据质心设置出初始搜索窗中心、大小,进一步计算。判断计算结果是否满足收敛条件,满足收敛条件后,发送小车的运动指令;不满足则重新计算。小车运行指令执行完成后,算法从视频采集图像到执行小车运动指令这部分程序中循环执行。
3.4 小车运动控制的实现
根据跟踪算法可以实现对目标的跟踪功能,要完成对目标的实时跟踪,智能小车需要清晰的采集图像信息,因此智能小车摄像头需要和目标保持一定的距离,距离太大容易丢失目标,距离太小会导致拍照不清晰,因此选择小车和被监测目标保持距离在30cm之间。实现方法是当目标位于小车前方30cm时得出目标的坐标(X,Y)。小车的运动中常常有抖动现象出现,因此需要进行去抖处理。当目标的坐标范围在(X±ΔX,Y±ΔY),认为被跟踪目标处于静止状态,否则小车根据计算机的命令随着目标一起运动。实现目标的跟踪需要小车的控制系统各部分功能模块进行协调工作,通过读取超声传感器的值进行计算,计算出小车和被跟踪目标的实际距离大小。小车需要执行的动作命令有7种,分别用0~7表示(其中1代表左上、2代表右上、3代表左后、4代表右后、5代表前进、6代表后退、7代表停止),根据计算结果发出相应的动作命令。小车动作实现原理:判断目标坐标和小车自身坐标距离是否大于30cm,如果大于30cm计算机发送动作命令。流程图如图6所示。
结语
本文在对目标识别和跟踪进行理论分析的基础上,设计了一套智能小车目标识别和跟踪系统。该系统可以实现对特定目标的识别和跟踪,能够满足基本的设计要求。然而,目标识别和跟踪技术是结合了多门学科的综合课题,想达到高度的智能化和高精度的定位功能还需要长期的研究,识别和跟踪技术的发展与数字图像处理技术、模式识别技术发展有密切的联系,需要在以后工作中在这两方面不断的学习和提高。
[1]蒙建波,梁锡昌.机械智能学[M].重庆,重庆出版社,1997.
[2]齐舒创作室.Visual C + +6 .0 开发技巧及实例分析[M].北京:清华大学出版社,1999.
[3]林福宗.图像文件格式大全[M].北京:清华大学出版社,1998.
[4]黎洪松.数字图像压缩编码技术及其C 语言程序范例[M].北京:学苑出版社,1998.
[5]陈先煌,陈新,赵音频.基于DSP的运动目标检测与匹配[J].福州大学学报(自然科学版),2003.
[6]魏玉虎,石琛宇,姜建钊.基于视觉的智能车转向控制策略[J].计算机技术与应用,2009.
[7]陈建峰,孙志锋.基于NRF2401的智能车无线调试系统设计[J].工业控制计算机,2009.
[8] 王熹微. 基于TMS320DM642的视频编码CACHE优化策略. 微计算机信息2005.
TP23
A
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2018年8期)2018-06-26
中国科技信息(2016年19期)2016-10-25
