四旋翼飞行器多功能实验平台设计
2015-07-07 15:44冯玉昌史冬琳白如冰
实验技术与管理 2015年4期
冯玉昌,门 洪,史冬琳,白如冰
(东北电力大学自动化工程学院,吉林吉林 132012)
四旋翼飞行器多功能实验平台设计
冯玉昌,门 洪,史冬琳,白如冰
(东北电力大学自动化工程学院,吉林吉林 132012)
详细介绍了四旋翼飞行器实验平台的设计以及在教学实践过程中取得的成果。该平台突出了模块化设计,在一个平台上实现了多种实验内容的自由组合与分解,极大丰富了实验内容,为学生锻炼动手能力、验证理论知识,提供了良好的平台。
实验平台;四旋翼飞行器;模块化设计;控制理论;MEMS传感器
自动化专业具有多学科交叉、内涵丰富、注重实践的特点,实验在自动化专业中起着关键作用[1]。但之前过于分散、独立的实验模式不利于学生对于整个专业宏观系统的了解,往往造成四年的大学学习过后,仍旧不了解自动化是干什么的。如何在实践中让学生系统地了解自动化专业成为自动化专业实验面临的重要课题[2]。
为加强对学生创新思维和综合创新能力的培养,构建先进的实验平台、营造良好的实验环境是提高实验教学质量的重要支撑[3]。国内各大高校近年来也不断加强实验平台和实验中心的建设,文献[4]指出实验平台的建设将成为未来实验教学发展的新模式,文献[5-7]提供了实验教学平台和实验中心建设的经验。
四旋翼飞行器是当今国内外各大高校的研究热点,属于自动化专业的前沿领域。具有涉及方面多、研究内容新、实用范围广等众多特点,对于培养学生动手能力、验证理论知识都是一个得天独厚的实验平台。
1 四旋翼飞行器实验平台设计
1.1 实验平台整体结构
四旋翼飞行器实验平台(以下简称平台)主体为一架四旋翼飞行器,搭配了相应的上位机软件用来检测传感器、飞行器姿态等信息。在设计该平台时,着重考虑了平台的先进性、多用途和扩展性,使之既能满足学生接触新事物、学习新知识的要求,又能保证与之前教授的内容不脱节。同时,采用了模块化的设计思想[8],便于维护、添加以及日后的升级,也便于进行模块化教学,步步深入,达到由局部到整体,既可以有所侧重,又可以系统学习。这也为平台的多用途性奠定了基础,使得该平台实现多层次、多学科的覆盖,可以为自动化专业所涉及的大部分主干课程提供实验支持。平台的整体结构见图1。
1.2 主要硬件构成

图1 四旋翼实验平台
四旋翼飞行器主要由主控芯片、惯性导航模块(INS)、无线通信模块、摄像头模块以及由无刷电机、无刷电调组成的动力系统。硬件框图见图2。

图2 四旋翼飞行器的硬件构成框图
(1)主控芯片。采用意法公司的STM32系列的STM32F103RBT6单片机。同时还为平台配备了对应的最小系统板、开发板。STM32f103系列单片机可以运行在72 MHz下,可以满足系统的要求。同时作为一款入门级的32位单片机,可以作为学生从所学的8位51系列单片机逐渐过渡到嵌入式系统的桥梁,也可以作为单片机原理与应用课程的扩展实验,也是培养创新实验室成员使用高性能单片机能力的良好平台。
(2)惯性导航模块。由MPU6050和HMC5883L构成,用来采集机体加速度、角速度以及地磁信号。这两款芯片都属于MEMS(微机电系统)传感器。MPU6050整合了3轴陀螺仪、3轴加速器,包含16位精度AD转换器,采用IIC接口。HMC5883L包括先进的高分辨率HMC118X系列磁阻传感器,可以测量地球磁场的方向和大小。MEMS传感器是当今研究的一个热点[9],在军事、民用领域有着越来越广泛的使用,对它的了解和使用,开拓了学生的视野。以此为基础,设计了姿态测量模块,也可以作为传感器、过程检测仪表与技术等课程的新实验内容。
(3)无线通信模块。采用基于Openwrt的迷你无线路由器。路由器作为一套Linux系统,负责完成图像采集,并完成上位机(PC机)和单片机直接的通信。还提供了2.4 GB模块、蓝牙、无线串口模块等作为选择。提供了丰富的无线通信途径,可以深入广泛地了解、掌握无线通信。
(4)摄像模块。配合无线通信模块,可以搭建无线图像传输系统,配合上位机实现机器视觉、图像识别等实验内容。
1.3 软件开发环境
平台提供了固定的通信协议和通信接口,学生可以使用Lab View、C/C++、Matlab等语言环境编写上位机软件,以实现数据采集以及后期的数据处理。下位机则采用Keil MDK编译环境,编写飞行器的控制、通信、传感器采集等程序。
姿态导航算法使用了基于欧拉角的姿态表示方法以及姿态矩阵的更新。还可以使用四元数法、旋转矢量法等其他算法。同时对传感器的数据进行滤波、数据融合等相关处理。在开发过程中,对3个机体轴分别建立了线性的系统方程,使得普通的卡尔曼滤波适用,大大减少了运算量,还满足基本的动态响应要求。姿态测量仿真结果如图3所示。
为飞行器姿态以及位置的控制提供了底层传感器的数据接口,可以通过上位机来控制,也可以在单片机中直接实现控制算法,因而是验证各种先进控制算法的平台,很好地实践了控制理论。可以充分融合自动化相关课程,如自动控制理论、计算机控制系统、先进控制专题、过程检测技术与仪表、传感器、C语言、单片机原理与应用等课程。控制效果曲线如图4和图5所示。
2 平台调试
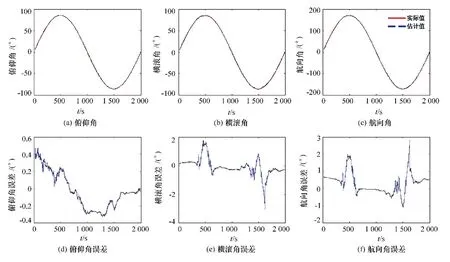
图3 姿态测量仿真结果
平台设计完成后,进行了各部分的联调,进行了各种环境下的可靠性和安全性测试。将过程中发现的螺旋桨误动作等危险因素做了处理,避免在实验中发生危险。设置了多重开关,避免误操作造成危险,同时在程序中设置了多个保护。最后进行了整机的调试,测试了串级PID控制器以及无线通信的效果和可靠性。测试表明,该平台基本满足控制要求和可靠性要求,可以作为实验平台提供给学生使用。除此之外,经过测试,平台还具有较大的空余负载能力,为日后升级设备、加装设备都提供了空间,有很好的扩展性。预留出了足够的I/O口,可以安装GPS等传感器,实现多样的导航方案,或者挂载航拍设备,使其具有实用价值。
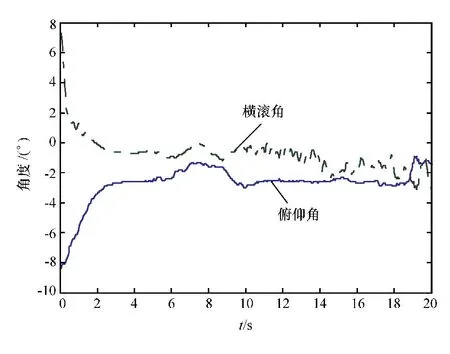
图4 无扰动作用下的俯仰角及横滚角曲线

图5 有扰动作用下的俯仰角及控制器输出曲线
3 实践探索
自平台搭建1年来,平台使用状况良好,多门课程依托本平台开展了实践项目训练,实验项目见表1。
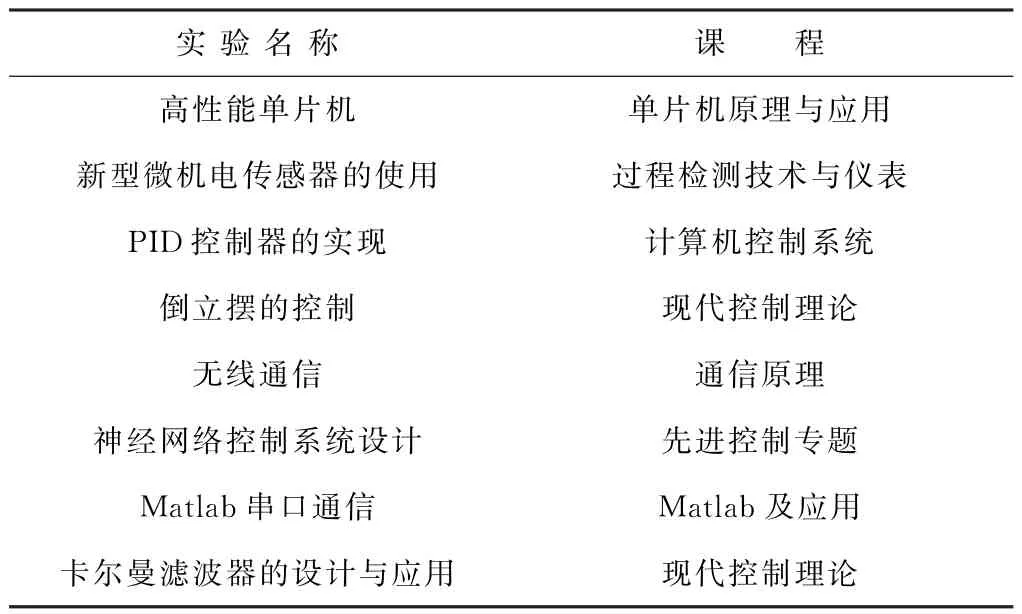
表1 相关课程实验训练
图6 STM32最小系统
在以上实验中,分别使用了该平台不同的模块,供不同课程、不同年级和层次的学生使用,使各模块得到了充分利用,成为了开展课外活动的良好平台[10]。以此为基础,实验室成员还搭建了内容丰富的测控系统,如无线数传、姿态测量、电机控制、角度控制等。该平台极大丰富了实验内容和课外活动内容。部分学生自主开发的STM32最小系统和姿态测量系统分别见图6和图7。引力,能使学生从被动应付实验变成主动实验,不仅提高了基本操作技能,也发挥了学生的学习自主性和创造性[12]。学生在校内外的多个竞赛中取得优异成绩。获得全国大学生电子竞赛二等奖1项,获得吉林省电子设计大赛一等奖2项,获得吉林省电子设计大赛二等奖1项、三等奖2项;获得校级电子设计大赛多项1等奖。通过该实验平台的实验训练,使得学生逐步形成了对自动化系统的认识,初步具备了自动化系统整体设计的能力,与理论的学习相得益彰。该实验平台的构建也培养了一批优秀的实验指导教师,为实验室以及院系的长期发展奠定了良好的基础。
4 结束语

图7 姿态测量系统
该平台也可以作为完整的飞行器,为知识体系较完善的高年级学生利用,为日后继续深造开展前期研究[11]。同时,也为开展相关的科研研究、理论实践,培养具有相关实践能力的专业人才,提供了实物平台。该平台同时还承担了校级大学生“综合性、设计性、研究性、自主开放型”实验项目,以及吉林省大学生创新创业训练计划等实践项目。
实践表明,该平台充分体现了模块化设计的优点。在单一平台上实现了众多功能以及进行众多实验项目训练,并取得了明显的实践效果,同时培养了创新实验室成员的实践和创新能力。学院设有创新实验基地,为学生进行创新型实验提供了良好的工作环境。综合创新型实验虽然有一定难度和深度,但对学生很有吸
如今实验设备的平台化已经逐步成为趋势,平台化可以充分利用实验场地,提高资金的利用率,最大程度利用设备,服务教学活动,提升学生的综合实践素质。同时实验平台也应当保持对本领域最新成果的跟踪,达到开拓学生视野的目的。本平台的研究内容新颖,而且具有很大的扩展空间。在未来很长一段时间,该平台都可以满足对学生培养以及科研的需要。
References)
[1]王茜.自动化综合性实验平台的建设模式[J].实验室研究与探索, 2009,28(10):96-98.
[2]马铁东,杨欣,李斌,等.自动化专业基础系列课程建设与实践[J].电气电子教学学报,2012,34(5):14-16.
[3]王培俊,罗大兵,李琳,建设虚拟设计与制造创新性实验平台多层次培养创新能力[J].实验技术与管理,2010,27(3):100-102.
[4]徐立芳,莫宏伟.仿真技术在智能控制实验平台建设中的应用[J].实验技术与管理,2013,30(8):74-76.
[5]高云鹏,滕召胜,黎福海,等.开放实验室与学科竞赛平台相结合的创新人才培养模式[J].实验技术与管理,2012,29(4):360-362.
[6]杨景发,王英龙,张晓凯,等.依托物理实验教学示范中心,完善创新实验平台建设[J].实验技术与管理,2011,28(8):229-231.
[7]吴强,杨全胜,王晓蔚.计算机综合课程设计实验平台建设及应用[J].实验技术与管理,2009,26(10):101-103.
[8]邢维巍,樊尚春,孙晋豪,等.微弱电信号检测分析综合实验平台建设[J].实验室研究与探索,2013,32(5):67-70.
[9]李荣冰,刘建业,曾庆化,等.基于MEMS技术的微型惯性导航系统的发展现状[J].中国惯性技术学报,2004,12(6):88-90.
[10]黄远新,何晓阳,朱利泉,等.生命科学实验平台建设与管理[J].实验室研究与探索,2006,25(7):866-868.
[11]王伟祖,郑旭明.建立综合设计实验平台培养学生创新能力[J].实验室研究与探索,2004,23(8):74-76.
[12]冯玉昌,门洪,关硕.微型计算机原理及接口技术课程教学实践研究[J].东北电力大学学报,2012,32(3):88-90.
Design of a four-rotor multi-function experimental platform
Feng Yuchang,Men Hong,Shi Donglin,Bai Rubing
(School of Automation Engineering,Northeast Danli University,Jilin 132012,China)
In the teaching of automation,practice plays an important role,and the experiment is a top priority.Fully functional experimental platform becomes an important part of laboratory construction.This paper introduces the design and construction of the four-rotor aircraft platform,and the results achieved in the process of teaching practice in detail.The highlight of this platform is the modular design.Students canmake a variety of experiment on this platform,which can greatly enrich the experimental variety and content,and provide a good platform for the students to improve their practical ability and practice the theoretical know ledge.
experimental platform;four rotor aircraft;modular design;control theory;MEMS sensor
G484;V279
A
1002-4956(2015)4-0098-04
2014-08-30修改日期:2014-09-24
吉林省教育厅高等教育教改项目;东北电力大学校级教改项目
冯玉昌(1977—),男,黑龙江鹤岗,硕士,讲师,主要研究方向为非线性预测控制、先进控制在热工过程中的应用.
E-mail:fengyuchang_fyc@163.com
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
学生天地(2020年3期)2020-08-25
电子制作(2019年9期)2019-05-30
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
小朋友·快乐手工(2015年5期)2015-06-06