下肢外骨骼康复机器人的灵敏度放大控制研究
2015-07-07 01:11陈贵亮周晓晨刘更谦
河北工业大学学报 2015年2期
陈贵亮,周晓晨,刘更谦
(河北工业大学机械工程学院,天津 300130)
下肢外骨骼康复机器人的灵敏度放大控制研究
陈贵亮,周晓晨,刘更谦
(河北工业大学机械工程学院,天津 300130)
针对课题组研发的下肢外骨骼康复机器人中的患者主动训练模式,提出了灵敏度放大的控制方法,建立弹簧阻尼模型更好的模拟出人机交互时的交互力,并通过Matlab/SimMechanics和BP神经网络建立逆动力学模型,用SimM echanics和Simulink模块进行了计算机仿真实验,仿真结果表明采用灵敏度放大控制方法能减小患者训练时体能的消耗,实现了患者以较小的力矩带动外骨骼实现共同运动,同时可以采集到患者腿部的数据进行康复评价.关键词下肢外骨骼康复机器人;灵敏度放大控制;人机结合;Matlab/SimM echanics
针对人体下肢康复训练问题,以现代康复医学理论、脑卒中患者肢体康复机理和方法为理论基础,对患者下肢康复训练的作用和效果进行了系统深入地研究,并提出下肢康复机器人被动、助力、主动及抗阻康复训练模式.文献[1]的研究结果表明PNF运动康复治疗技术利用促进、抑制、阻力和反射等神经生理机制,可以增加骨盆的稳定性和纠正下肢的错误运动,以便抑制偏瘫患者关节运动控制障碍及步态的异常现象的出现.因此,依据PNF技术提出了患者主动训练模式,其主要目的是在肢体能够实现基本运动功能之后,实现患者腿部由共同运动到精细动作的分离,患者主动参与对关节的灵活度和身体协调度的训练,便可以抑制其偶尔发生的异常肢体运动.
灵敏度放大控制(Sensitivity Amplification Control,SAC)方法不需要在人机之间安置任何传感器,同时又能控制外骨骼机器人跟随患者运动[2].该方法是将患者作用到外骨骼上的力与外骨骼的输出的传递函数定义为灵敏度函数,传统的系统是将灵敏函数最小化,以增加系统对外界干扰等的鲁棒性,然而此处的控制目标却是设计合理的控制器使该灵敏度函数最大化,则就能够实现患者用很小的力带动外骨骼机器人的运动.患者主动机器随动模式下患者与外骨骼之间维持一定的小范围内的相互作用力,此时外骨骼与患者的运动数据相同,通过外骨骼上安装的角度传感器及力传感器等检查装置,可用于对患者进行康复评价.
1 灵敏度放大控制
图1为下肢外骨骼康复机器人与患者结合的系统方框图,ac表示驱动器施加于外骨骼康复机器人的力矩,f表示阻尼和静、动摩擦力矩,Ghm为患者动态,表示除重力力矩之外施加于外骨骼康复机器人的外力矩总和,故有式(1)

图1中未加入SAC控制器,也就意味着控制外骨骼康复机器人的运动需要由患者施加所有的力和力矩,即ac=0,则式(1)化简得

将文献[3]中的下肢外骨骼康复机器人动力学模型与式(2)相结合得

如果如图2所示加入SAC控制器,并且设计控制器为

依据式(4)得知驱动器施加大部分控制力矩,则患者施加的力矩变为
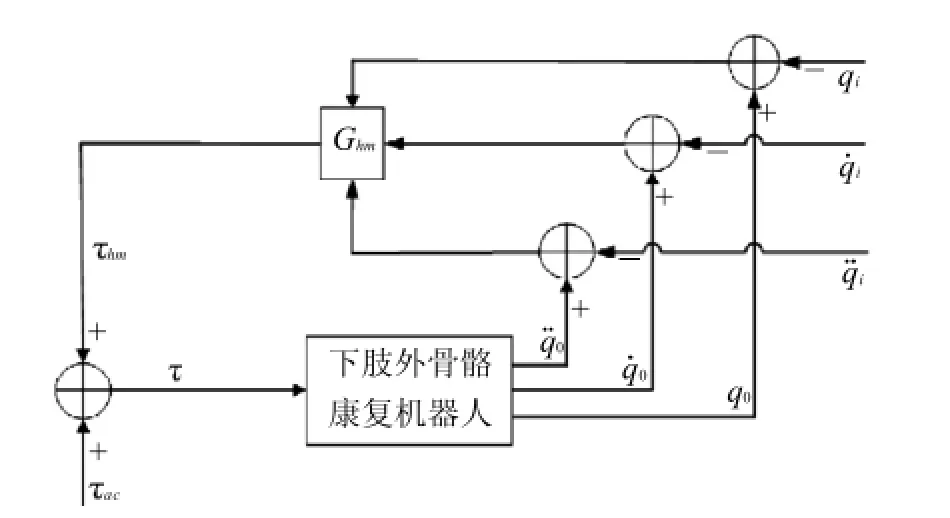
图1 未加驱动的外骨骼康复机器人系统方框图Fig.1 The system diagram of no driver exoskeleton rehabilitation robot

图2 带有SAC控制器的外骨骼康复机器人系统方框图Fig.2 The system diagram ofw ith SAC controller exoskeleton rehabilitation robot

2 外骨骼与患者之间的人机交互作用力
人机交互作用的研究发展过程中,早期将人体单纯地视为用多刚体模型用来研究冲击运动,但是由于没有办法分析人体的粘弹特性对冲击性运动的影响,因此具有很大的局限性.Benno M NIGG和Wen Liu[4]研究人体冲击时的缓冲特性时,把人体当做质量块和弹簧阻尼元件进行建模,并与人体的多刚体模型共同考虑进行修改.汤小红和杨岳[5]研究铁路卧铺客车乘客在卧姿状态下全身承受振动的舒适度问题时,建立了“人—铺—车辆”振动系统空间垂直方向的动力学模型,并将“人—铺”之间的相互作用关系采用弹簧—阻尼模型.日本筑波大学研制和开发的HAL-3(Hybrid Assistive Leg)通过检测穿戴者肢体的肌电信号从而获得穿戴者的运动意图,然后控制该机器人模仿人体自身的肌肉收缩功能,穿戴者与HLA之间的相互作用同样采用的是弹簧—阻尼模型,只是该模型的输入位移为膝关节的角度值,通过雅克比矩阵可将其转化为关节处的等效力矩[6].
下肢外骨骼康复机器人与患者通过捆绑实现连接,在康复训练过程中,两者之间的相互作用力出现在患者的大腿及小腿与外骨骼的捆绑处.本文中的外骨骼与患者之间的相互作用可简化为如图4a)的弹簧—阻尼模型,输入为患者腿部位移χi=χχiχyiT,输出为外骨骼的位移χ0=χχ0χy0T.当外骨骼的运动完全由患者带动时(ac=0),采用如图4b)的数轴法,即建立与系统平行方向的数值,把弹簧和阻尼器的实际位移值当做有理数标在对应位置,然后根据弹簧力和阻尼力方向的确定原则,按照有理数比较大小的结果来确定相应质量块(或转动刚体)所受弹簧力和阻尼力的大小和方向[7].
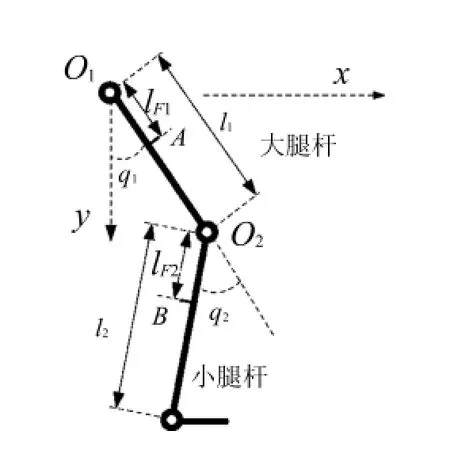
图3 下肢外骨骼康复机器人右腿结构简图Fig.3 Thestructurediagram ofexoskeleton right leg
然而,在课题提出的4种康复训练模式中,驱动下肢外骨骼康复机器人的驱动力矩由两部分组成:驱动器输出力矩和患者作用在外骨骼上的等效力矩,即外骨骼产生的关节角加速度、角速度和角度等是两者共同作用的结果.患者与外骨骼之间的相互作用力分析图如图4c)所示,因此患者与外骨骼之间的相互作用力为F=FχFyT变为

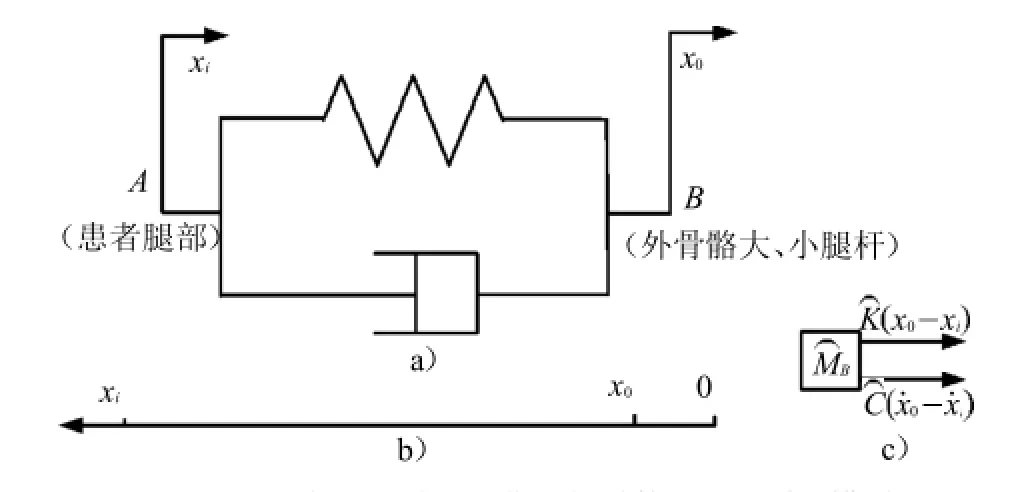
图4 患者与外骨骼相互作用的弹簧—阻尼系统模型Fig.4 Spring-dashpotM odelof Patients InteractW ith Exoskeleton
雅可比矩阵J表示外骨骼机械腿随时间变化的几何关系,它可以将单个关节的微分运动或速度与所求点或整个外骨骼机械腿的微分运动或速度联系起来,如图3所示,患者与外骨骼之间的相互作用力分别出现大腿杆捆绑处A点和小腿杆捆绑处B点,两端到相应关节(髋关节和膝关节)的长度分别为lF1和lF2,所以A、B两点的位置χ,y和关节角度位移q1,q2位置运动学方程通过几何法求得为

由此建立了患者与外骨骼捆绑处运动位置与髋、膝关节角度的对应关系.通过微分原理得

将式(9)、式(10)整理得

其中JA、JB分别是患者与外骨骼在大腿杆、小腿杆捆绑处运动关系的反映,反映了外骨骼关节微小位移与捆绑处微小运动之间的关系.因此,式(6)可转化为

式中hm表示患者施加于外骨骼康复机器人的力矩.所以,A、B两点处作用力等效到髋、膝关节的力矩为

从式(14)可知,当hmA和hmB将渐近趋近于零,意味着患者在行走过程中好像外骨骼不存在,保证训练的舒适度和无干扰等影响,此时患者与外骨骼训练过程中髋、膝关节的关节角度、角速度相同,达到采集数据的目的.
3 仿真实验
文献[8]中已对本课题的下肢外骨骼康复机器人通过Solidworks软件建立精确的三维实体模型,联合Matlab/SimMechanics建立下肢外骨骼康复机器人的动力学模型,并以髋、膝关节角度、角速度和角加速度作为输入信号,输出信号为关节力矩,进行逆动力学仿真分析.将仿真后的输入输出数据利用三层BP神经网络进行训练并获得外骨骼逆动力学动态数学模型.在Matlab命令窗口输入gensim(net,1),可将建立的网络生成一个相应的Simulink网络模块,如图5所示.

图5 神经网络的Simulink模块Fig.5 Simulink M oduleof Neural Network
基于SimMechanics和Simulink工具箱建立的仿真控制模型如图6所示,人体的运动输入信号采用美国斯坦福大学开发的OpenSim软件[9]提供的人体步态数据,外骨骼右腿的输入信号为髋、膝关节的力矩,输出为两个关节的角度信号、角速度信号和角加速度信号.假设两个关节处的运动摩擦力矩系数均为0.05,sfunction4作为人机交互作用接触面(Humanmachineinterface)的仿真模型.NeuralNetwork模块(外骨骼逆动力学模型)与增益模块共同构成SAC控制器.
仿真结果如图7、图8所示,显示了外骨骼和患者髋、膝关节承受力矩的对比图,点划线为外骨骼髋、膝关节驱动器的输出力矩,实线为患者髋、膝关节承受的力矩.
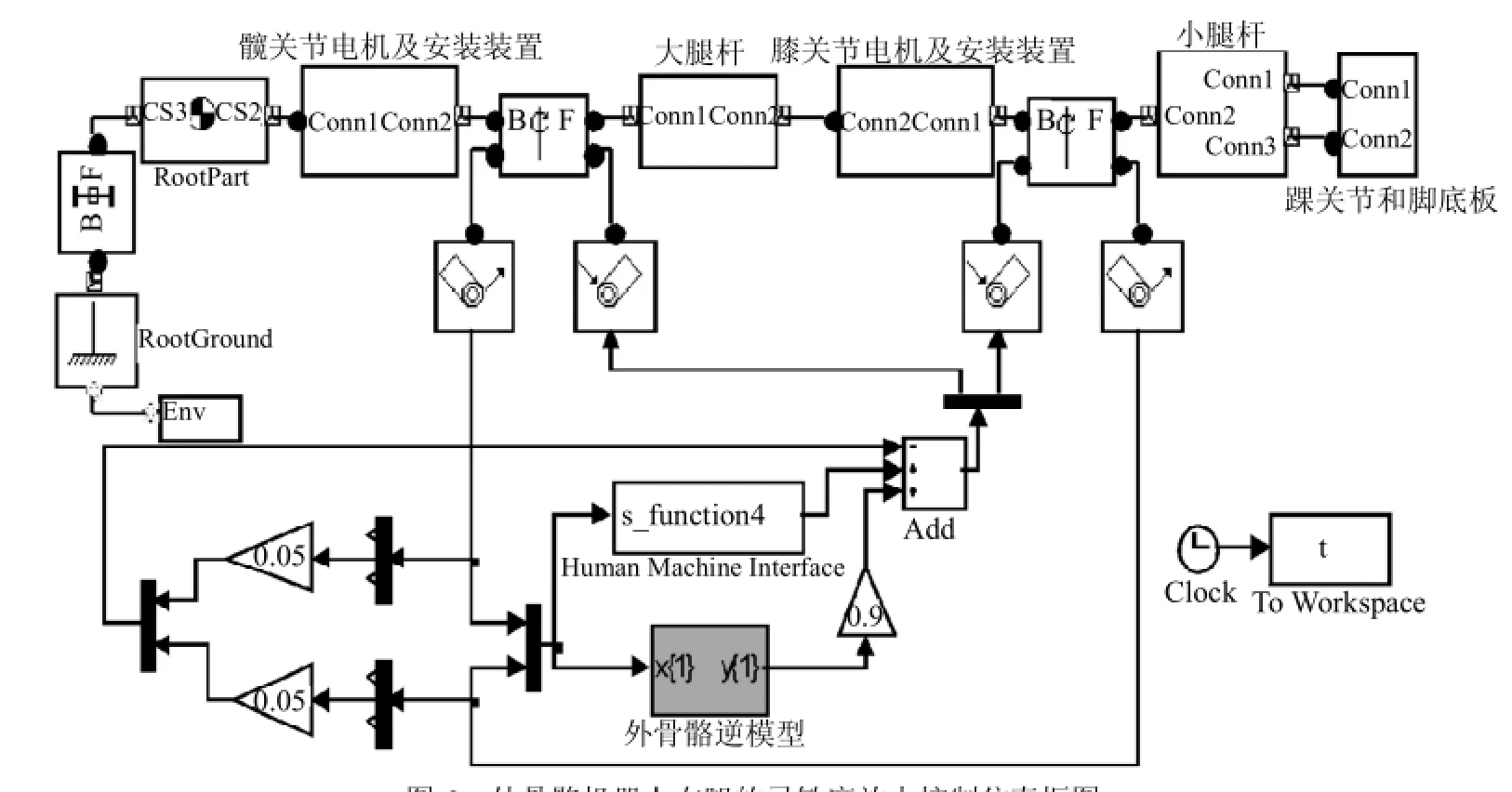
图6 外骨骼机器人右腿的灵敏度放大控制仿真框图Fig.6 Sensitivity Amplification ControlSimulation Block Diagram of Exoskeleton Right Leg
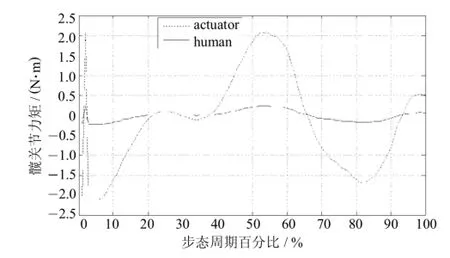
图7 患者与外骨骼机器人髋关节施加力矩对比图Fig.7 The torque contrastof patientsand exoskeleton on hip joint

图8 患者与外骨骼机器人膝关节施加力矩对比图Fig.8 The torque contrastof patients and exoskeleton on knee joint
对比两图中曲线的变化可知,与驱动器施加到外骨骼上的力矩相比较,患者施加的力矩非常小.因此得出结论,加入SAC控制器后能够减小患者的承受力矩,减小体能消耗,实现患者与外骨骼共同运动的同时采集到准确的人体数据.
4 结论
依据康复理论提出了患者主动康复训练模式和控制实现方法,利用Matlab/SimMechanics工具箱建立动力学模型及BP神经网络进行识别,获得精确的逆动力学模型,并利用弹簧-阻尼模型表示人机之间的相互作用关系,仿真实验结果表明灵敏度放大控制能够减小患者的承受力矩,减小体能消耗,实现患者与外骨骼很舒适地共同运动,同时也可采集到准确的人体数据用于康复评价.然而,SAC控制器的缺点就是对模型精确度的要求很高,进一步的研究就是提高对外骨骼实体样机模型识别精确度及对参数摄动的鲁棒性.
[1]Adler SS,BeckcrsDominiek,Buck Math.PNF in Practice[M].Third Edition.SpringerMedizin Verlag,2008:233-270.
[2]杨智勇,张静,归丽华,等.外骨骼机器人控制方法综述[J].海军航空工程学院学报,2009,24(5):520-526.
[3]陈贵亮,李长鹏,刘更谦.下肢外骨骼康复机器人的自适应控制研究[J].制造业自动化,2012,34(24):5-9.
[4]Nigg BM,LiuW.Theeffectofmusclestiffnessand dampingonsimulated impact forcepeaksduring running[J].Journalof Biomechanics,1999,32(8):849-856.
[5]汤小红,杨岳,彭波.铁路卧铺客车人体振动舒适性建模与仿真[J].振动与冲击,2010,145(5):157-161.
[6]LeeS,SankaiY.Powerassistcontrolforwalkingaid with HAL-3 based on EMG and impedancead justmentaround knee joint[C]//EPFL.Intelligent Robotsand Systems.Switzerland:IEEE/RSJInternationalConference,2002:1499-1504.
[7]白艳艳,张晓俊.建立弹簧-质量-阻尼系统数学模型的数轴法[J].噪声与振动控制,2012,32(3):59-62.
[8]陈贵亮,李长鹏,赵月,等.下肢外骨骼康复机器人的动力学建模及神经网络辨识仿真[J].机械设计与制造,2013(11):197-200.
[9]Delp ScottL,Anderson Frank C,Arnold Allison S,elat.OpenSim:open-sourcesoftware to createandanalyzedynamic simulationsofmovement [J].IEEE Transactions on Biomedical Engineering,2007,54(11):1940-1950.
[责任编辑 杨屹]
Research on sensitivity amplification controlof lower limbs exoskeletons rehabilitation robot
CHENGuiliang,ZHOU Xiaochen,LIU Gengqian
(Schoolof M echanical Engineering,HebeiUniversity of Technology,Tianjin 300130,China)
For the developmentof lowerextrem ity exoskeleton robotrehabilitation of patientswith active trainingmode, themethod ofcontrolling thesensitivity of theamplificationwasproposed,and abetter spring-dampermodelwasbuilt to simulate the interaction forceof human-computer interaction and established inverse dynamicsmodelby Matlab/SimMechanics and BPneuralnetwork after Computer simulation experiments had beenmade by SimMechanics and Simulink M odule.Thesimulation resultsshow thatSensitivity amplification controlmethod can reducephysicalexertion of patient, and im plementpatientw ith less torque to achieve commonmovement driven exoskeleton,meanw hile,data collected in the legs can be used in Rehabilitation Evaluation.
lower limbsexoskeletons rehabilitation robot;sensitivity am p lification control;human-machine;Matlab/ SimMechanics
TP242
A
1007-2373(2015)02-0053-05
10.14081/j.cnki.hgdxb.2015.02.012
2014-10-15
河北省教育厅科技计划(ZD200915)
陈贵亮(1965-),男(汉族),高级工程师,博士.通讯作者:刘更谦(1965-),男(汉族),教授,博士.