
驾驶者行为选择对十字路口通行能力的影响
2015-07-07 15:36吴腾宇徐寅峰
运筹与管理 2015年4期
吴腾宇, 徐寅峰, 张 珩
(1.西安交通大学 管理学院,陕西 西安 710049; 2.机械制造系统工程国家重点实验室,陕西 西安 710049)
驾驶者行为选择对十字路口通行能力的影响
吴腾宇1,2, 徐寅峰1,2, 张 珩1,2
(1.西安交通大学 管理学院,陕西 西安 710049; 2.机械制造系统工程国家重点实验室,陕西 西安 710049)
考虑通过十字路口时左转车辆和直行车辆发生路权冲突时的不同驾驶者行为,将驾驶者分为跟随型驾驶者和谦让型驾驶者,并建立了左转车辆通过十字路口的模型,研究不同的驾驶者行为选择对十字路口通行能力的影响。结果表明,随着交通流量逐渐增加,驾驶者的行为越趋向于跟随时,十字路口的通行能力将会急剧降低;而当驾驶者的行为趋向于谦让时,十字路口的通行能力甚至优于有交警指挥的情形。该结果很好地解释了在行车高峰期中国十字路口堵塞的原因,即驾驶者的行为选择,可以通过改变驾驶者的行为选择和在交通流量达到一定的饱和度时派出交警来改善十字路口的通行能力。
驾驶者行为;十字路口;通行能力
0 引言
城市交通拥堵已经成为世界各大城市交通的共同现象,中国在城市化发展的过程中,这一问题显得更为突出,十字路口作为城市交通道路网络的结点,大约80%的交通拥堵发生于此[1]。而十字路口的交通拥堵主要是由于左转车辆和直行车辆发生路权冲突所引起,对这一系列问题展开研究具有重要意义。
国内外学者针对左转车辆对十字路口通行能力的影响方面做了大量的研究。有学者研究了左转车辆通过十字路口的不同方式[2]。从研究的方法来看,国外研究通用的方法为HCM法和R·金伯方法;而国内学者最常用的方法有停车线法和冲突点法以及运用计算机仿真进行的相关研究[3];还有的学者从概率论的视角建立数学模型来对左转车辆的通行时间进行研究[4~6]。本文将采取概率论的视角建立模型来进行分析。而对于驾驶者的行为选择研究,有学者分析了驾驶者行为机理[7]和运用博弈论来分析驾驶者在十字路口的行为[8]以及分析了交通信号灯对驾驶者行为的影响[9~10]。还有的学者运用冲突分析来分析不同的交通流发生冲突的情形,但是这类文献并没有考虑不同的交通流对于通行时间的相互影响。以往的模型并没有考虑左转车辆对与自己发生路权冲突的对向直行车辆的影响,而且大多假设直行车道的车流密度在处于饱和状态或者接近饱和状态时,左转车辆无法通过,但在现实情形中,特别是在中国,左转车辆存在插缝通过的行为。虽然我国交通法规规定直行车辆拥有优先权,但是在现实中左转车辆的驾驶者将车停在道路中央,一点点向前挪动,直到车身完全占据对向直行车道,在这一过程中,直行车辆的行驶也会被左转车辆干扰,为了更快地通过十字路口,直行车辆的驾驶者大多会选择绕行前进。这种情形在中国的十字路口处经常发生。该情形的本质是左转车辆和直行车辆发生路权冲突时,驾驶者应该选择继续前行还是等待。根据对驾驶者行为的观察,驾驶者分为以下两种类型:
跟随型驾驶者(The following driver):对于某个车辆驾驶者,当其它方向的车辆与该车前方的车辆发生路权冲突时,如果车辆驾驶者选择跟随前面的车辆继续通过冲突点,除非冲突车辆将其完全阻挡而不能通过冲突点,那么车辆驾驶者为跟随型驾驶者。
谦让型驾驶者(The humility driver):对于某个车辆驾驶者,当其它方向的车辆与该车前方的车辆发生路权冲突时,如果驾驶者选择让其它方向的车辆先通过冲突点,那么车辆驾驶者为谦让型驾驶者。

图1 有信号灯控制的三车道十字路口
本文研究左转车辆通过单向三车道的有信号灯控制的十字路口(如图1所示)时,左转和直行车道驾驶者在采取不同行为时,左转车辆通过十字路口所需要的时间,进一步比较在不同的交通流量下,驾驶者行为选择对直行车道的通行能力(即在相同时间内通过的直行车辆数)影响。
1 问题描述和模型建立

本文假设如下:(1)同Wu[11]中的假设类似,三个车道中直行车到达十字路口的概率为aT,而其它情形的概率为aLR(例如对于直左车道来说,没有车到达和左转车辆到达的概率为aLR);(2)直行车道上左转的车辆和右转的车辆不会影响左转车辆通过十字路口;(3)一个左转车辆完全占据其中一个直行车道时,它不会影响到其它直行车道的车辆行驶;(4)行人对左转车辆和直行车辆的干扰忽略不计。
通过对不同驾驶者的行为选择进行分析,本文建立了不同驾驶者行为下左转车辆通过十字路口的时间模型,计算出在该模型下所能通过的直行车辆数。旨在分析不同的驾驶者行为对十字路口通行能力的影响,并进一步分析在行车高峰期中国十字路口拥堵的原因。
1.1 跟随型驾驶者
当所有车辆驾驶者均是跟随型驾驶者,考虑有p(p≤x)辆左转车辆时的情形。此时当左转车辆插入直行车辆车道时,直行车道的车辆也会有插缝行为,因此只考虑p≤x的情形,此时延误系数同样为α。
将左转车辆穿过十字路口的过程分为三个阶段:
(1)无阻碍阶段:左转车辆的车头以速度v从F点行驶到B点,此时所花的时间为1.89l/v
(2)插缝阶段:左转车辆的车头从B点行驶到E点
(3)驶出阶段:即车尾行驶到E点,此时所花的时间为m/v
计算插缝阶段所需要的时间,首先给出如下性质:

此时一个左转车辆通过三个车道的时间为:
(1)
p辆左转车辆通过十字路口的总时间为:
(2)
当p=1时,由于一个左转车辆完全占据其中一个直行车道时,它不会影响到其它直行车道的车辆行驶。此时当左转车辆驶入并完全占据一个直行车道时,直行车辆的通过数应该包括该车道所通过的直行车辆数和其它车道在无阻碍时所能通过的车辆数。但是当p≥2时,当左转车流的最后一辆车完全占据直行车道时,此时直左车道才能无阻碍通行。
当p=1时,在时间Tf(p)时间内通过的车辆数为:

(3)
当p≥2时,在时间Tf(p)时间内通过的车辆数为:

(4)
由于左转车辆插入直行车道,当最后一辆左转车辆离开直行车道时,此时直左车道和直行车道最多能够通过3aT辆直行车辆。
1.2 谦让型驾驶者
因此当p=1时,易得左转车辆通过十字路口的总时间:
(5)

(6)
当p≥2时,情形较一个左转车辆时有所不同,因为前一个左转车辆在下一个车道等待与否将会影响下一个左转车辆在当前车道的通过时间,因此考虑前一个左转车辆的情形,当前一个左转车辆通过下一个车道时,直到下一个左转车辆进入上一个车道时,此时上一个车道最多可能到达两辆直行车,因此假设左转车辆经过该车道的路径长度为l′,此时下一个左转车辆通过该车道需要花费的时间为:
那么p(2≤p≤x)辆左转车辆通过十字路口的时间为:
(7)
而在时间Th(p)内所通过的直行车辆数为:
(8)
1.3 十字路口有交警的情形
(9)
M=3at+3pat
(10)
2 不同的驾驶者类型对十字路口通行能力的影响比较分析
2.1 两种类型驾驶者情形下十字路口通行能力比较
对于城市的十字路口来说,道路的通行能力是最基本的交通参数,道路通行能力是道路上某一车道或某一断面处,单位时间内可能通过的最大车辆数。在本节中,本文比较当驾驶者的行为选择不同时,十字路口的单向直行车道车辆通行能力,对于城市交通来说,在单位时间内通过的车辆数越多越好。首先比较两种情形下左转车辆通过十字路口的时间,当其中一个情形的耗费时间较多,则以该情形中左转车辆通过十字路口的时间为标准,比较在该时间段内两种情形下通过的直行车辆数,此时全是谦让型驾驶者情形下和全是跟随型驾驶者情形下直行车辆通过数之差为:
M′(p)=Mh(p)-Mf(p)+3(Tf(p)-Th(p))staT
结合实际的道路交通,令l=3,m=4.7,m′=2.3(单位均为米),v=6.5(单位为米/秒),比较不同的延迟情形(不同的α和x)和不同的交通流量大小(即aT的值)对于直行车辆通行能力的影响。
图2 不同的左转车辆数在两种情形下通行能力的比较
如图2所示,只有一个左转车辆时,当交通流量达到饱和流量的60%以上时,在相同时间内,全是谦让型的驾驶者比全是跟随型的驾驶者的情形通过的车辆数更多。当aT较小时,随着α和x的增加,反而会使得全是跟随型驾驶者的情形通过的车辆数更多。因为此时aT较小,反而会使得左转车辆在全是跟随型驾驶者的情形下通过十字路口的时间更少。当左转车辆数p>2时,对于全是谦让型驾驶者的情形,此时通过的车辆数在任何情形下都多于全是跟随型驾驶者的情形;对于反映左转车辆插缝行为的参数α,即使左转车辆的插缝行为对于直行车辆的行驶不产生影响(α=1),当aT较大时,在全是谦让型的驾驶者的情形下通过的车辆数也会更多。而随着aT的逐渐增大,α和x的增大将会导致两种情形下的车辆数之差的变化更加地剧烈。
图3 不同的左转车辆数有交警指挥情形与谦让型驾驶者情形的比较
2.2 有交警指挥时与不同驾驶者类型下十字路口通行能力比较分析
同上一节的分析,此时有交警指挥下的情形与全是谦让型驾驶者和全是跟随型驾驶者情形下通过的车辆数差值为:
M′=M-Mh(p)+3(Th(p)-T)stat
M″=M-Mf(p)+3(Tf(p)-T)stat
由图3可知,当交通流的流量逐渐增大时,两种情形下车辆数之差是先增大后减小,而随着左转车辆数的增加,车辆数之差越来越大;无论在哪种情形下,当所有驾驶者均是谦让型驾驶者时,通过的车辆数更多,当车流量饱和时,两种情形下相差的车辆数为定值,其值为3。
如图4所示,随着反映直行车辆跟随意愿的参数x的增大,当aT越小时,越需要交警来指挥交通(意味着当x增加,其它参Z不变时,使得M″=0的aT值越小);当aT逐渐增大时,相比较左转车辆数p的增加,当反映直行车辆跟随意愿的参数x增大时,将会导致两种情形下通行车辆数之差更大,也就是x会更大程度地影响十字路口的通行能力;而随着aT的逐渐增大,α和的x增大将会导致两种情形下通过车辆数之差的变化更加的剧烈。如果考虑到变化的剧烈程度,当aT<0.6时,其变化并不是很剧烈(此时相差的车辆数小于10),意味着当aT>0.6时,交警指挥疏导交通将使十字路口通行能力大大提高。
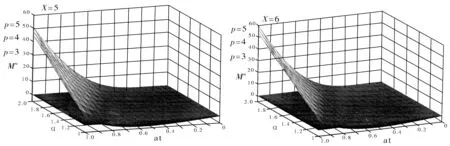
图4 不同的左转车辆数有交警指挥时与跟随型驾驶者时的比较
3 实例分析
本文以西安市兴庆路与咸宁路交叉口和太乙路与友谊路交叉口为例,采取在路口录像的方法进行了连续几天的交通调查,选择了高峰期时期的数据作为样本数据与本文的模型进行比较。由于是高峰期,在本文的模型中,取aT=0.9,α=1.5,x=3,比较如下表:
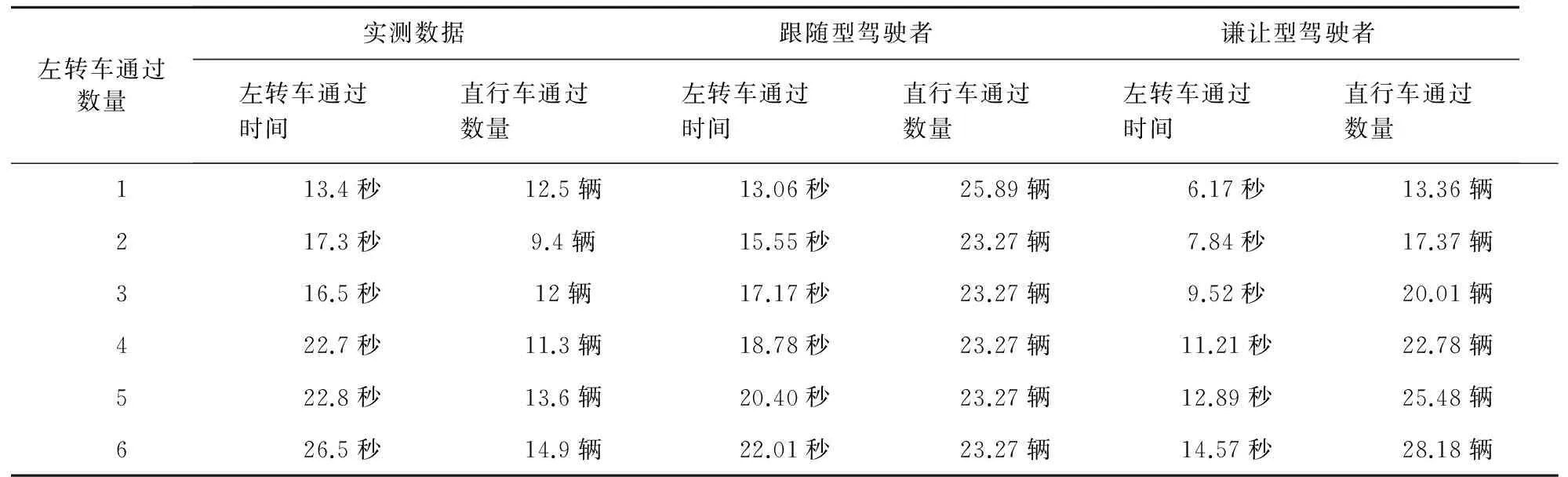
表1 实测数据与模型的比较
如表1所示,全是跟随型驾驶者情形下左转车通过时间和实测数据相比相对误差并不大,而且当左转车辆增多时,左转车通过时间更多,这是因为直行车辆也会进行插缝,从而导致左转车的延误;对于直行车通过的数量,实测数据更少是因为两个十字路口的直右车道均是公交车道,车辆相对较少,而且右转车辆较多造成的。通过对比可以发现,本文所描述的跟随型驾驶者情形比较符合中国的实际情形,所推导的理论模型是能够有较好的实用性。
而与谦让型驾驶者的情形相比,如果驾驶者能够改变其驾驶行为,是能够改善十字路口在高峰期的拥堵情况。
4 结论
本文考虑车辆驾驶者通过十字路口面对路权冲突的行为选择,将采取不同驾驶者行为的驾驶者分为跟随型驾驶者和谦让型驾驶者,并结合有交警指挥下驾驶者的行为,在此基础上建立了左转车辆通过十字路口的时间模型和直行车辆通行能力的模型,并研究了不同的驾驶者行为在不同的交通流量下对于十字路口的通行能力的影响。
当交通流量比较小时,驾驶者的行为对于直行车辆通过十字路口的数量并没有太大的影响,当交通流量逐渐变大时,不同的驾驶者行为对于直行车辆通过十字路口的数量会产生较大的影响。这也是中国的十字路口在行车高峰期堵塞非常严重的原因,由于在中国大多的驾驶者是跟随型驾驶者,因此改变驾驶者行为选择和在交通流量达到一定的饱和度时派出交警将会有效地改善十字路口的通行能力。而通过与实测数据的比较,本文所描述的跟随型驾驶者情形比较符合中国的实际情形,所推导的理论模型是能够有较好的实用性。上述的结论从驾驶者行为选择的角度解释了具有中国特色的十字路口堵塞的原因,但是本文只考虑了驾驶者行为对于整体的交通影响,并没有考虑驾驶者行为选择对于自身和其它的驾驶者行为的影响,这也是需要进一步研究的方向。
[1] 张彬,李文勇,陈学武.单向交通条件下交叉口通行能力分析与仿真[J].交通与计算机,2005,23(3):52-55.
[2] 李淑庆,谢晓忠,邬贵冬.城市道路两相位交叉口左转车道通行能力研究[J].重庆交通大学学报:自然科学版,2010,29(5):745-749.
[3] 王殿海,孙锋,金盛.两相位交叉口左转车通行能力计算方法[J].吉林大学学报:工学版,2007,37(4):767-771.
[4] Levinson H S. Capacity of shared left-turn lanes-simplified approach[C]. Transportation Research Record, TRB, NationalResearch Council, Washington, D.C., 1989, Vol(1225).
[5] Kikuchi S, Kii M, Chakroborty P. Lengths of double or dual left-turn lanes[C]. Transportation Research Record, TRB, National Research Council, Washington, D.C., 2004, Vol(1881): 72-78.
[6] Kikuchi S, Chakroborty P, Vukadinovic K. Length of left-turn lanes at signalized intersections[C]. Transportation Research Record, TRB, National Research Council, Washington, D.C., 1993, Vol(1385): 162-171.
[7] 郑亮,马寿峰,贾宁.基于驾驶员行为的元胞自动机模型研究[J].物理学报,2010,59(7):4490- 4498.
[8] 刘小明,王秀英.基于重复博弈的无灯控交叉口驾驶员行为模型[J].中国公路学报,2011,24(4):94-100.
[9] 黄灯期间信号交叉口的驾驶员行为[J].系统工程,2010,28(12):117-120.
[10] 倒计时信号交叉口处的驾驶员行为决策[J].系统工程理论与实践,2009,29(7):160-165.
[11] Ning Wu, Modelling blockage probability and capacity of shared lanes at signalized intersections[J]. Procedia Social and Behavioral Sciences, 2011, 16: 481- 491.
Impact of Driver Behavior on Capacity at the Signalized Intersections
WU Teng-yu1,2, XU Yin-feng1,2, ZHANG Heng1,2
(1.SchoolofManagement,Xi’anJiaotongUniversity,Xi’an710049,China; 2.TheStateKeyLabforManufacturingSystemsEngineering,Xi’an710049,China)
When the conflicts between the left-turn vehicles and the through vehicles have happened at the signalized intersection, we consider different driver behaviors and divide the drivers into two types: the following driver and the humility driver, and build a model of the left-turn vehicles going through the intersection. The impact on the intersection’s capacity by the different driver behavior is studied. The results show that when all the drivers are the following drivers, with the increase of the traffic flow, the capacity of the intersection decreases sharply. When all the drivers are the humility drivers, considering the situation that the policeman directs traffic, the capacity of the intersection will be better. These results can explain the reason for the blocking of the intersections at the heavy traffic time in China well. We can improve the capacity of the intersections by changing the driver behavior and by directing traffic by a policeman.
driver behavior; intersections; capacity
2013- 08- 06
国家自科基金资助项目(71071123,61221063);长江学者和创新团队发展计划(IRT1173)
吴腾宇(1984-),重庆人,博士研究生,研究方向:交通运输;徐寅峰 (1962-),男,吉林人,教授,研究方向:组合优化。
U491
A
1007-3221(2015)04- 0141- 07
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
警察技术(2022年3期)2022-06-22
小天使·四年级语数英综合(2021年3期)2021-05-10
山东交通科技(2020年3期)2020-08-05
中外公路(2020年1期)2020-06-06
湖南交通科技(2020年1期)2020-04-08
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2018年7期)2018-09-14
中国交通信息化(2014年11期)2014-06-05
