
基于UG和ADAMS的水下爬壁机器人的设计和动力学分析
2015-07-07 07:06杨海强周灿丰
制造业自动化 2015年7期
杨海强,周灿丰,高 辉
(北京石油化工学院 能源工程先进连接技术北京市高等学校工程研究中心,北京 102617)
0 引言
水下爬壁机器人是一种能够在水下高强度、高危险环境中进行作业的自动化装置,它通过吸附装置贴在水下壁面上,移动机构在一定的吸附力的情况下在壁面上移动,从而带动执行机构完成工作任务。水下爬壁机器人能够应用于许多行业,像核工业、造船业、渔业、近海领域等[1~3]。
UG作为当今世界最为流行的CAD/CAM/CAE软件之一,功能强大,可对产品建模、加工、分析设计、准确的获得工业造型设计方案[4]。特别是它的三维建模功能,能够快速的完成零部件建模,另外还可以跟其他CAD/CAM/CAE软件完成数据传输。
ADAMS是目前世界上使用范围最广的机械系统运动学和动力学仿真软件[5]。它使用交互式图形环境和零件库、约束库、力库等创建参数化机械虚拟样机,其求解器采用多刚体动力学理论中的拉格朗日方程法建立系统动力学方程,通过虚拟样机来模拟复杂机械系统的整个运动过程,达到提高设计性能、节约成本、节省时间的目的。
ADAMS虽然是很好的运动学和动力学仿真软件,但是它的建模功能相对较弱,对于一些形状复杂的大型零件来说,一般是使用CAD软件进行三维实体建模,再将模型导入ADAMS中,建立仿真模型,进行仿真分析,所以笔者设计的水下爬壁机器人是通过UG进行三维建模,然后在ADAMS软件中进行动力学仿真,验证并得到合适的吸附力。
1 UG三维模型的建立
1.1 机械本体的建立
机械本体主要是承载电源、驱动系统、传动系统、电子控制系统等,根据它们的位置和尺寸基本确定机械本体的尺寸,经过综合考虑,最后机械本体的尺寸为500mm×540mm×65mm,考虑到水下爬壁机器人工作的水下深度和经济型要求,机械本体采用亚克力材料,这种材料强度高、透光性好、易加工,而且价格便宜。利用UG软件建立机械本体的三维模型,如图1所示。
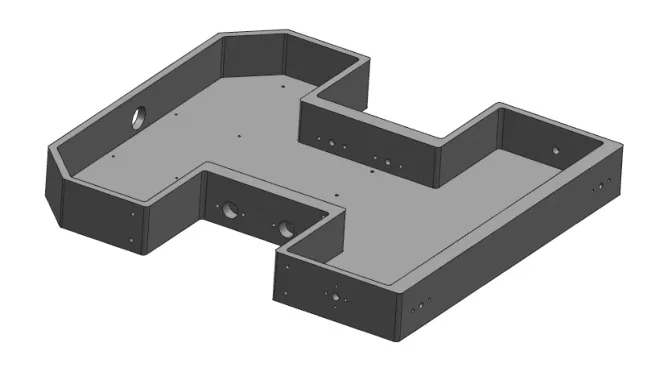
图1 机器本体
1.2 照明系统建立
水下爬壁机器人的照明灯具选用的的MBS-07水下灯具,这种灯具采用不锈钢管,24V直流电供电,如图2所示。由于机器人的下潜深度要到达到20m左右,为防止灯具进水,应设计相应的防护罩,以保证照明装置的正常工作,根据灯具的实际尺寸,然后设计防护罩的形状和尺寸,利用UG软件建立防护罩的三维模型,如图3所示。

图2 MBS-07水下灯具
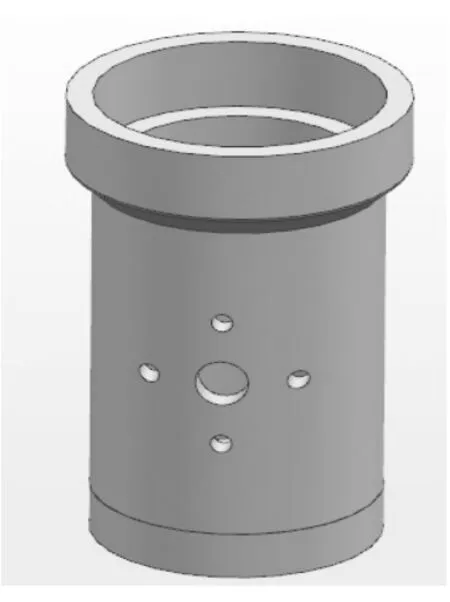
图3 水下灯具防护罩
1.3 内部结构的建立
机械本体内主要有电源、驱动系统,传动系统、电子控制系统等,根据选用零件的实际尺寸,利用UG进行三维建模,并将这些零部件装入机械本体内,建立水下爬壁机器人虚拟样机,总的装配图如图4所示。
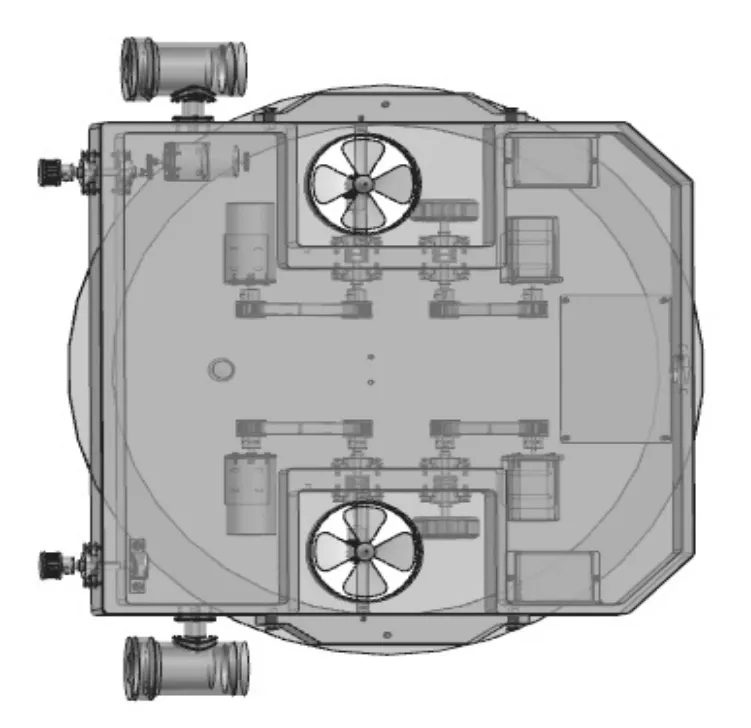
图4 水下爬壁机器人虚拟样机
2 力学模型
水下爬壁机器人的力学模型如图5所示,F1,F2是左、右两个螺旋桨产生的推力,N1,N2,N3是壁面对机器人的支持力,G是水下机器人的重力,F浮是在水中的浮力,F阻是在水中运动的阻力,Ff是在壁面对机器人的摩擦力。
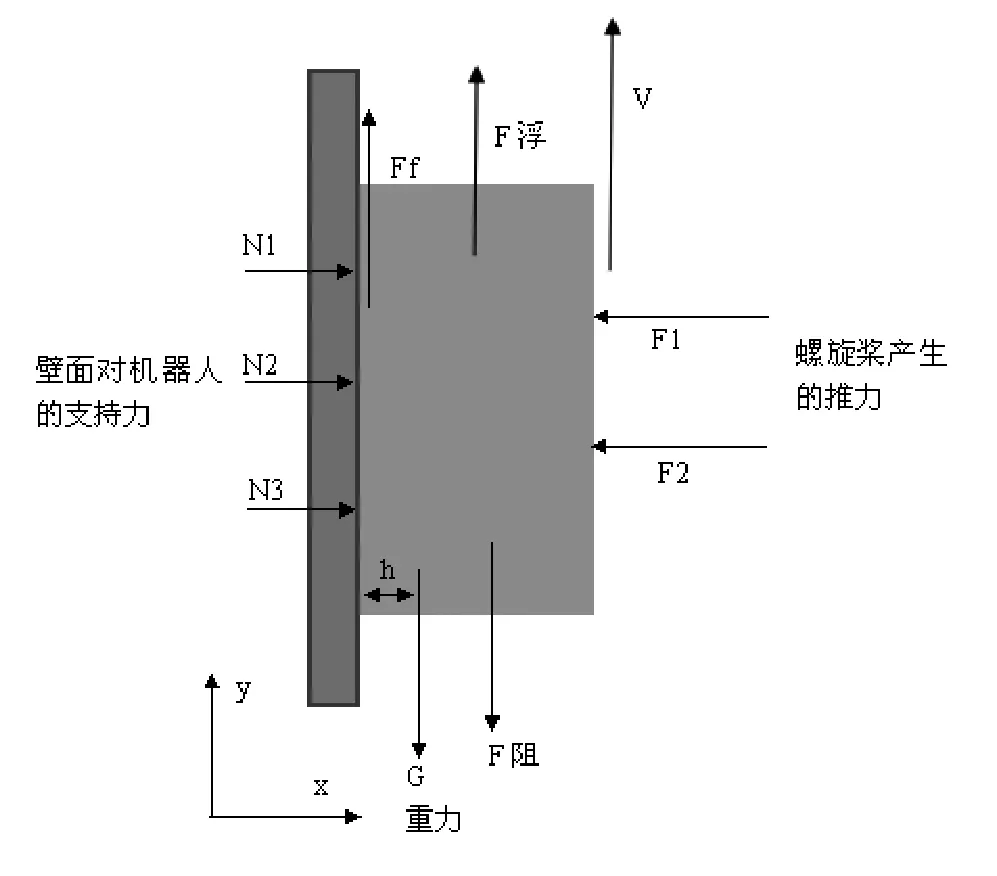
图5 机器人静力学模型
在x,y轴方向上受力平衡,可表示为:
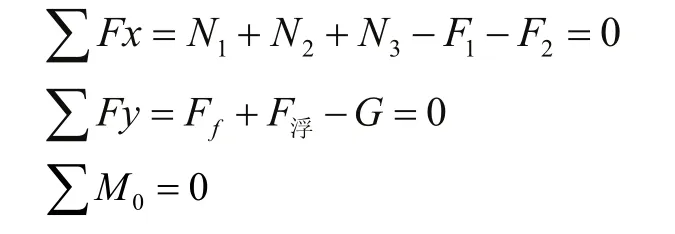
机器人在壁面作业时可能会出现两种危险情况:一是机器人在壁面上的滑落,二是机器人在壁面上发生倾覆,这两种情况都需要螺旋桨提供足够的吸附力,所以确定吸附力的大小是一个非常关键的问题。
3 ADAMS动力学仿真
3.1 动力学仿真流程
首先在UG中建立的实体模型,进行一定程度的简化,点击Export命令,选择建立的装配图模型,输出Parasolid的文件格式,然后在ADAMS中点击Import命令,选择Parasolid(*.x_t)文件类型;导入模型以后,右击每个零部件,在Modify Body对话框中改变其质量、材质和惯性矩等初始设置。然后对零部件添加约束,最后进行动力学仿真[6,7]。机器人仿真流程图如图6所示。
3.2 水下爬壁机器人ADAMS仿真
将UG建立的水下爬壁机器人三维模型导入ADAMS中,然后在左右轮旋转副上添加驱动,其大小与爬壁机器人的行走速度和转向半径有关。将驱动的大小设为变量,在ADAMS软件中添加约束与驱动并且建立壁面模型后,如图7所示。
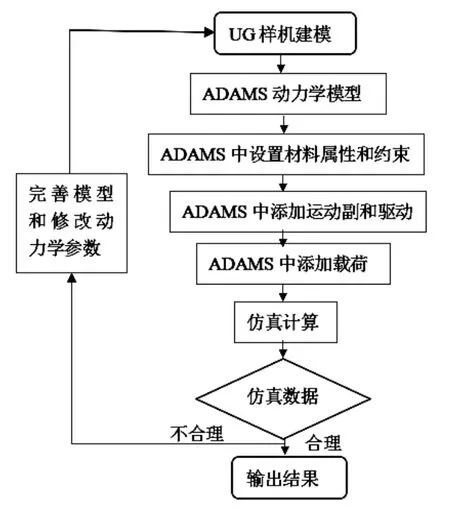
图6 机器人仿真流程图

图7 水下爬壁机器人动力学模型
在爬壁机器人动力学模型中,左右两个螺旋桨产生的推力方向垂直于壁面,-Y方向,重力方向平行于壁面向下,+Z方向,摩擦力和浮力方向平行于壁面向上,-Z方向。为了得到一个使水下爬壁机器人既不滑落又节能的吸附力,分别记录吸附力为10N,20N,30N,40N时,与其相应的水下爬壁机器人的移动速度如图8所示。
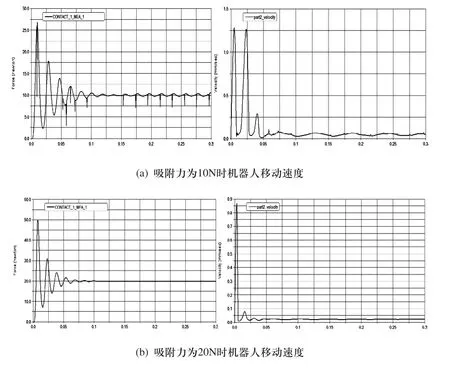
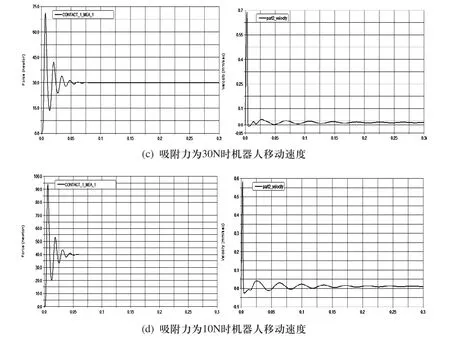
图8 水下爬壁机器人ADAMS仿真结果
当吸附力为10N时,水下爬壁机器人的移动速趋于平稳后,有一个比较大的浮动,这表示水下爬壁机器人的吸附效果不是很牢靠;当吸附力为20N,30N,40N时,水下爬壁机器人的移动趋于平稳后较小,而且移动速度的值也很小,这时候水下爬壁机器人能够可高的吸附在壁面上,所以吸附力为20N时能够满足要求。
4 结论
1)利用UG建立了水下爬壁机器人的机械本体、照明装置、内部结构的三维模型,并把这些三维模型组装成一个整体,为动力学分析提供了。
2)提出了水下爬壁机器人的力学模型,分析了水下机器人发生滑落的两种情况,为动力学的分析提供了理论依据。
3)通过在ADAMS软件中建立动力学模型并进行仿真,分别得到了机器人在不同的螺旋桨推力的情况下的移动速度,最后得到了一个既不滑落又不浪费功耗的推力,为水下机器人的设计提供了理论依据。
[1]王园宇,武利生,李元宗.壁面清洗机器人发展趋势浅析[J].引进与咨询.2002,(4):3-4.
[2]Kochan A.Robotics moves on wards and upwards.Industrial Robot, 2003, 30(3):225-230.
[3]Elkmann N,Felsch T,Sack M,et al.Modular climbing robot for service-sector application.Industrial Robot,1999,26(6):460-465.
[4]臧艳红,管殿柱,UG NX8.0三维机械设计[M].机械工业出版社, 2014.
[5]刘晋霞,胡仁喜,康士廷.ADAMS 2012虚拟样机从入门到精通[M].机械工业出版社,2013.
[6]贺金虎,廉自生.基于ADAMS的带式输送机输送带特性仿真分析[J].制造业自动化.2014,36(4):91-93.
[7]张卫锋,樊炳辉.基于UG和ADAMS的变形移动机器人的动力学仿真分析[J].机床与液压,2007,35(1):211-212,201.
猜你喜欢
船海工程(2022年6期)2023-01-02
北京航空航天大学学报(2022年7期)2022-08-06
哈哈画报(2021年10期)2021-02-28
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
上海医药(2018年21期)2018-11-21
北京航空航天大学学报(2017年5期)2017-11-23
制造业自动化(2017年2期)2017-03-20
北京航空航天大学学报(2016年6期)2016-11-16
浙江大学学报(工学版)(2016年11期)2016-06-05
图书与情报(2013年1期)2013-11-16
