
高速并联光学扫描平台设计*
2015-07-07 15:42:09李凯格黄丹
自动化与信息工程 2015年3期
李凯格 黄丹
(广东省自动化研究所 广东省现代控制技术重点实验室 广东省现代控制与光机电技术公共实验室)
高速并联光学扫描平台设计*
李凯格 黄丹
(广东省自动化研究所 广东省现代控制技术重点实验室 广东省现代控制与光机电技术公共实验室)
提出一种两自由度球面并联机构,并基于该并联机构模型设计了一种高速光学扫描平台。平台采用直线音圈电机作为驱动实现高速运动,以直线光栅传感器和二维PSD传感器作为反馈元件实现双闭环高精度伺服控制,建立扫描平台的数学模型并进行运动学求解。基于ADAMS对所设计高速扫描平台进行运动学和动力学仿真,验证该设计的可行性。
扫描;并联机构;PSD传感器;音圈电机
0 引言
高速光学扫描机构作为光学系统的关键器件,广泛应用于精密加工、精密定位、光束传输、激光投影以及增量制造(3D打印)等领域,其主要功能是实现平面反射镜的快速、高频转动以达到快速控制光束方向的目的。反射镜有两个旋转自由度即可实现空间扫描运动。
现有两自由度扫描机构主要有单轴结构、串联结构和并联结构3种形式。单轴结构形式的扫描平台最典型的是扫描振镜[1],由两个独立并正交分布的单轴结构组成,转轴直接与反射镜固定连接,光束通过两次反射实现二维扫描运动,由于反射镜与电机转轴直接刚性连接,转动惯量很小,反射镜可以达到非常高的扫描速度,但不足的是多次反射会使光束在传播时能量衰减变大,使误差放大。串联结构形式的扫描平台广泛应用于望远镜、雷达等跟踪系统[2],由偏转轴和俯仰轴正交组成,俯仰轴的所有结构全部置于偏转轴上,所以无法像扫描振镜那样具有很小的转动惯量,无法达到较高的扫描速度,存在扫描盲区,目前这种技术非常成熟,是非高速扫描应用的首选。并联机构目前主要应用在机器人领域,采用并联闭环杆系,动平台由多杆支撑。运动部件质量轻,惯性小,有效改善了伺服控制器的动态性能,适于高速扫描。并联机构由于结构限制,其运动空间较小,不适用于大范围运动,但扫描平台并不需要移动,同时无需较大的旋转运动范围,恰好可以避开并联机构的弱点。现有并联结构形式光学扫描设备应用较少,复合轴结构形式望远镜中的快速反射镜[3]是典型的应用,其具有较高的扫描速度,但扫描范围较小,通常不超过1°。
本文提出了一种两旋转自由度并联机构并应用于光学扫描平台,较快速反射镜大大提高了扫描范围,同时保证了扫描精度以及较高的扫描速度。
1 机械结构设计
1.1 结构模型及自由度计算
两自由度球面并联机构由动平台(反射镜)、机架、2个主动支链和1个约束支链组成,如图1所示。
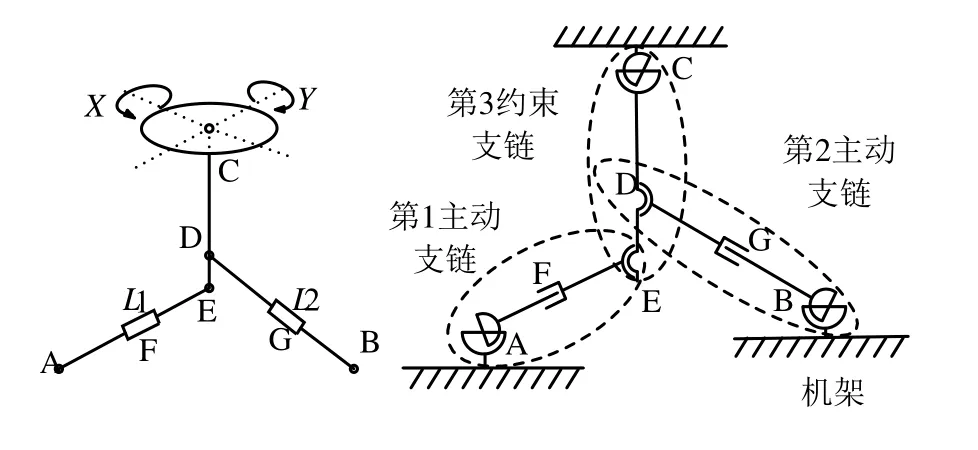
图1 两自由度球面并联机构原理图
第1主动支链由虎克铰A、移动副F、球副E组成,第2主动支链由虎克铰B、移动副G、球副D组成,第3约束支链上有1个改装型虎克铰C。第1主动支链一端与动平台通过球副E连接,另一端与定平台(机架)通过虎克铰A连接;第2主动支链与动平台通过球副D连接,另一端与定平台通过虎克铰B连接;第3约束支链一端通过虎克铰C与定平台连接,另一端分别通过球副E、D与第1主动支链和第2主动支链连接。
根据修正的Kutzbach-Grubler[4]机构自由度计算公式
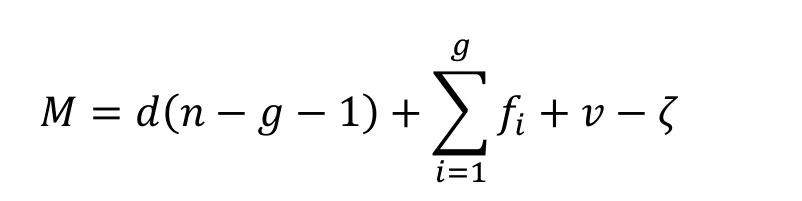
其中,M为机构自由度数;d为机构阶数,d=6-λ,λ为公共约束数目;n为机构构件数目(包括机架); g为运动副数目;fi为第i个运动副的自由度;v为过约束的数目;ζ为局部自由度的数目。
图1所示空间机构无公共约束、过约束和局部自由度,即ζ=v=λ=0;机构阶数d为6;有6个杆件(包括机架);运动副g为7(包括有2个球副各有3个自由度,3个虎克铰各有2个自由度,2个移动副各有1个自由度)[4]。
该并联机构自由度为

1.2 整体结构
高速并联光学扫描平台整体结构如图2所示,由驱动部分、主轴结构、反射镜法向位置反馈装置和XY框架结构组成。驱动部分与主轴结构分别通过电机XY框架结构、主轴XY框架结构与机架(图3)固定连接,XY框架结构等效图1中的虎克铰A、B、C。驱动部分通过关节轴承(图3)与主轴连接,等效图1中的球铰E、D,两关节轴承同轴上下分布。电机的直线运动等效图1中的移动副F、G。通过控制两组直线电机的伸缩间接控制反射镜的转动。平衡状态时两组电机轴向方向相互垂直,反射镜位于主轴上端面,垂直于主轴轴向,反射镜的旋转中心落在反射面上。反射镜法向位置反馈装置位于主轴正下方并与底座固定连接。
1.2.1 驱动机构
为实现高速扫描,需要直线电机具有很高的响应频率并能提供足够的加速度。直线音圈电机能产生0.7 N~1000 N的强大动力,行程一般少于50 mm,自身的响应频率可以达到2 kHz以上,与其他同类型的直线电机相比具有更高的响应频率和加速度。

图2 高速并联光学扫描平台整体结构
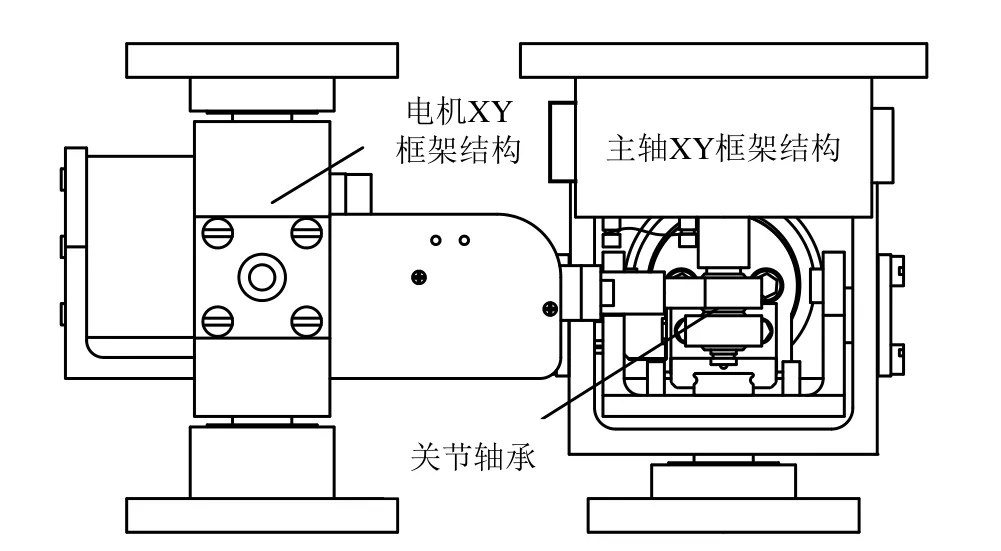
图3 高速并联光学扫描平台正视图
驱动部分结构如图4所示,由光电限位开关、直线光栅传感器、微型直线导轨、直线音圈电机组成。机构处于平衡位置时,电机部分的重心处在XY框架结构的旋转中心,以使电机绕X轴和Y轴的转动惯量最小,使电机输出的推力最大消耗在驱动主轴运动上,将消耗在电机之间互相作用的推力降到最低。
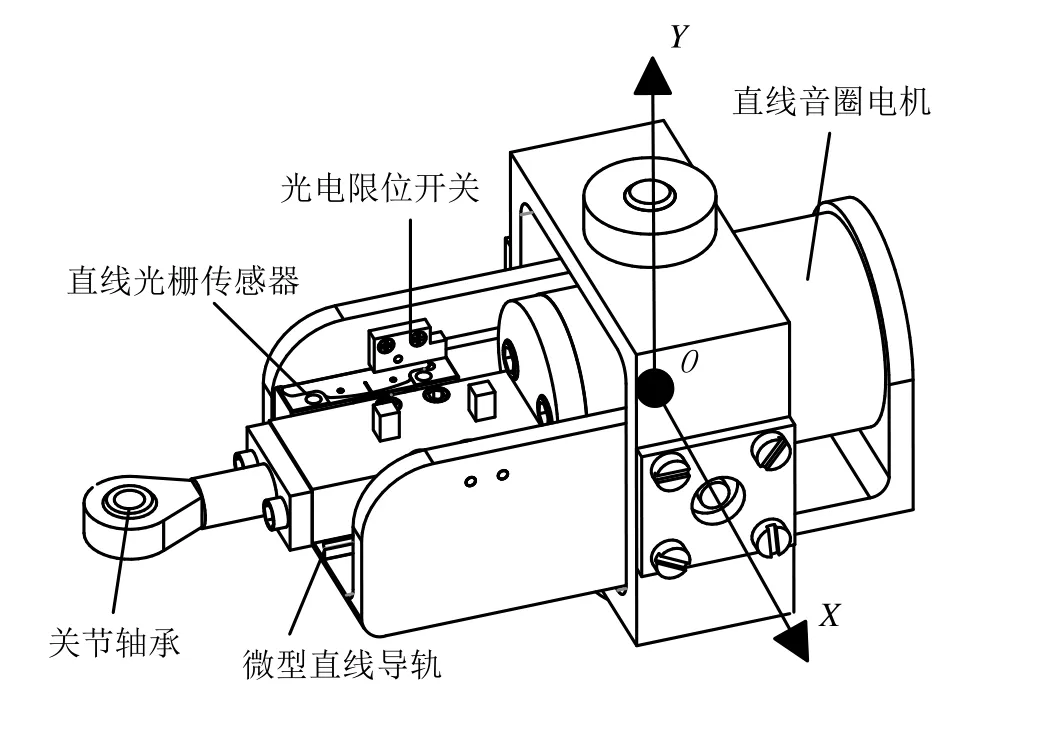
图4 驱动部分结构
1.2.2 主轴、反射镜支撑结构和反馈设计
受机械加工、装配和多级传动的影响,反射镜的理论位置和实际位置会存在一定误差。本文在机构末端加装反馈元件来消除误差,采用全闭环实现高精度的运动。针对扫描平台的特点设计一种反射镜法向位置检测方法[5]:如图5(a)所示的主轴结构,微型激光器内置于主轴,主轴通孔,激光可通过主轴通孔射出并照射在位于主轴下方的二维位置传感器(position sensitive detectors,PSD)[6]上。PSD传感器是一种能测量光点在探测器表面上连续位置的光学探测器,具有较高的位置分辨率以及响应速度,位置信号与落在探测器上的光斑形状无关,只与光斑能量中心有关。通过检测二维PSD表面光斑的位置就可以得到主轴的轴向方向。
采用二维PSD传感器检测反射镜位置方法的准确性关键在于,是否可以用内置激光器发出光线的方向替代平面镜的法向方向,即主轴通孔轴向方向与反射镜反射面是否垂直[7]。设计如图5(b)所示的反射镜支撑结构,反射镜与支架通过强力胶粘合,橡胶垫圈位于反射镜支架与主轴上表面之间,起弹性支承作用。通过调节螺钉对反射镜的法向方向进行微调。
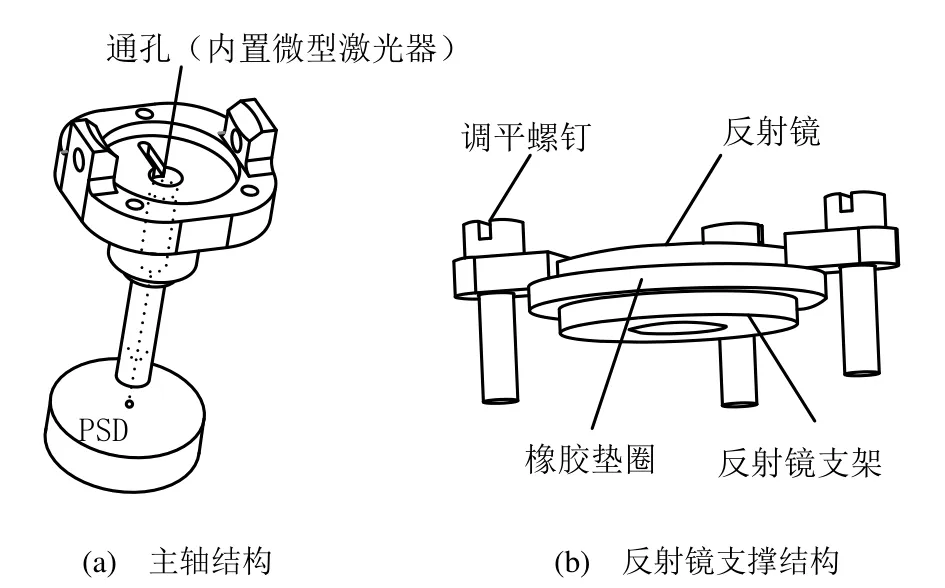
图5 主轴、反射镜支撑结构
反射面与主轴通孔方向垂直度调节方法如图6所示,主轴和外置激光器(或自准直仪)的调整平台分别有2个旋转自由度和3个平移自由度,调整主轴和激光器的相对位置使激光光束穿过主轴通孔,当投射点P最亮时,表明激光光线方向和主轴通孔轴向方向重合,锁紧调整机构。将微型激光器和反射镜安装到主轴上,此时外置激光器射出的光线会被反射,通过调节主轴上的调节螺钉来调整反射镜的法向,使光线沿原路返回。反射镜反射面与主轴通孔轴向方向通过此方法具有很高的垂直度。
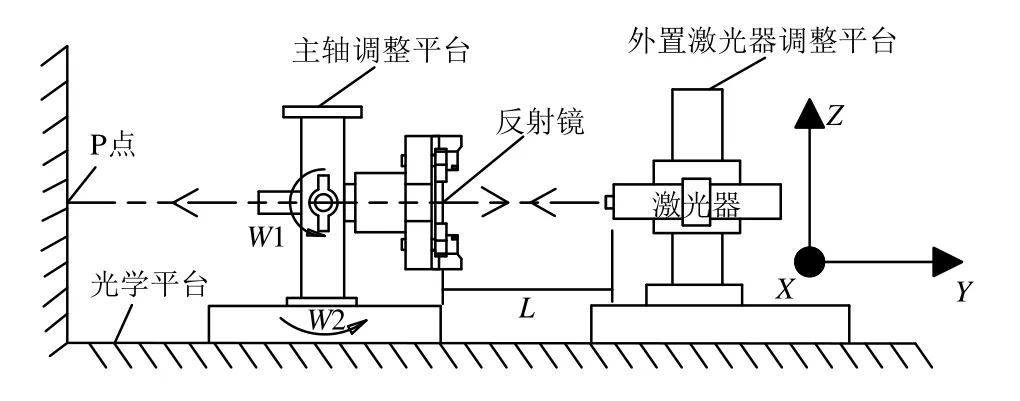
图6 反射面与主轴通孔方向垂直度调节方法
2 伺服系统
扫描平台硬件结构单元之间的关联图如图7所示,扫描平台的伺服系统是由位置反馈和速度反馈构成的双闭环系统。采用基于PC的运动控制卡作为控制器,直线光栅传感器作为直线音圈电机的速度反馈装置,二维PSD直接检测反射镜的位置。2组电机通过传动结构共同作用于主轴产生反射镜的扫描运动,内置于主轴的激光器照射在PSD传感器表面点的位置,与2组直线电机的伸长量一一对应,通过PSD传感器可以同时得到2组电机的位置信息。
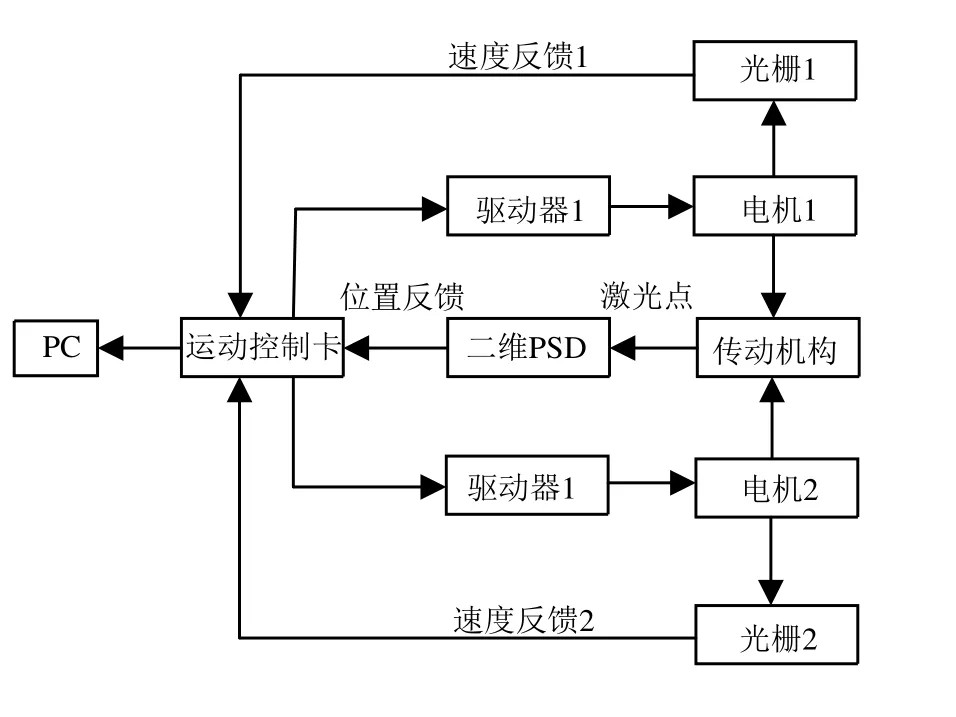
图7 扫描平台硬件结构单元之间的关联图
3 模型分析
3.1 数学模型
并联机构运动学分析即建立各种运动构件和末端执行器空间位置、姿态之间的关系,主要研究运动正解与逆解。对于并联机构而言逆运动学求解简单,正运动学求解比较复杂,且实际应用过程中大量用到运动逆解,用到运动正解的相对较少。该两自由度并联机构的运动求解相对简单,运动学正解和逆解均可求出。
扫描平台光路及运动几何模型[8-9]如图8所示,入射光线ei照射在XOY平面即反射镜上。反射光线eo的俯仰角为αo,偏转角为βo,反射镜法向即主轴方向en的俯仰角为αn,偏转角为βn。L1、L2为机构处于平衡位置时|e1|、|e2|的长度,Lx、Ly为直线电机伸长量。其中ei、eo、en为单位向量,L1、L2、e1、e3、e4、a、b为常量,80°≤αn≤90°。
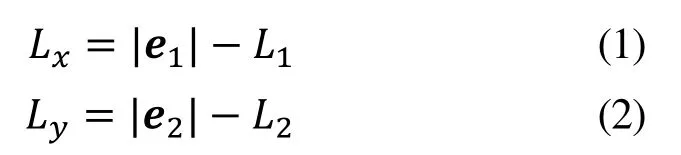
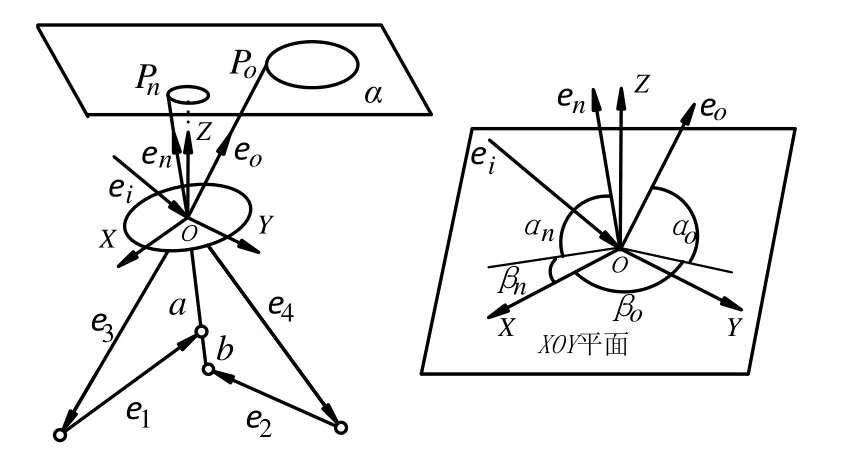
图8 扫描平台光路及运动几何模型
扫描平台的运动学正解,即根据直线音圈电机伸长量Lx、Ly,求解扫描平台的法向方向即俯仰角和偏转角;运动逆解即根据平台法向方向求解两直线音圈电机伸长量。
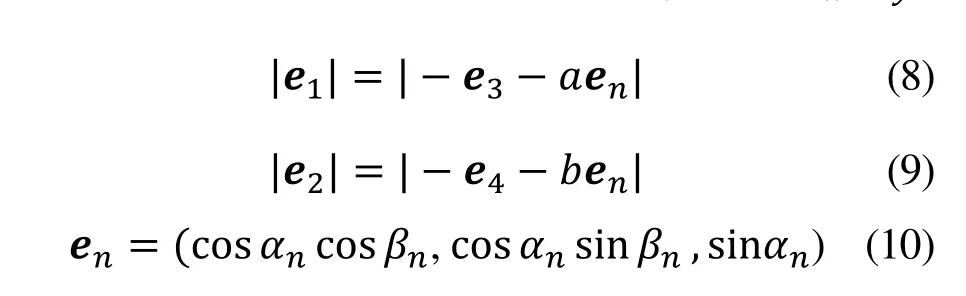
运动学正解:即已知Lx、Ly,求解en。
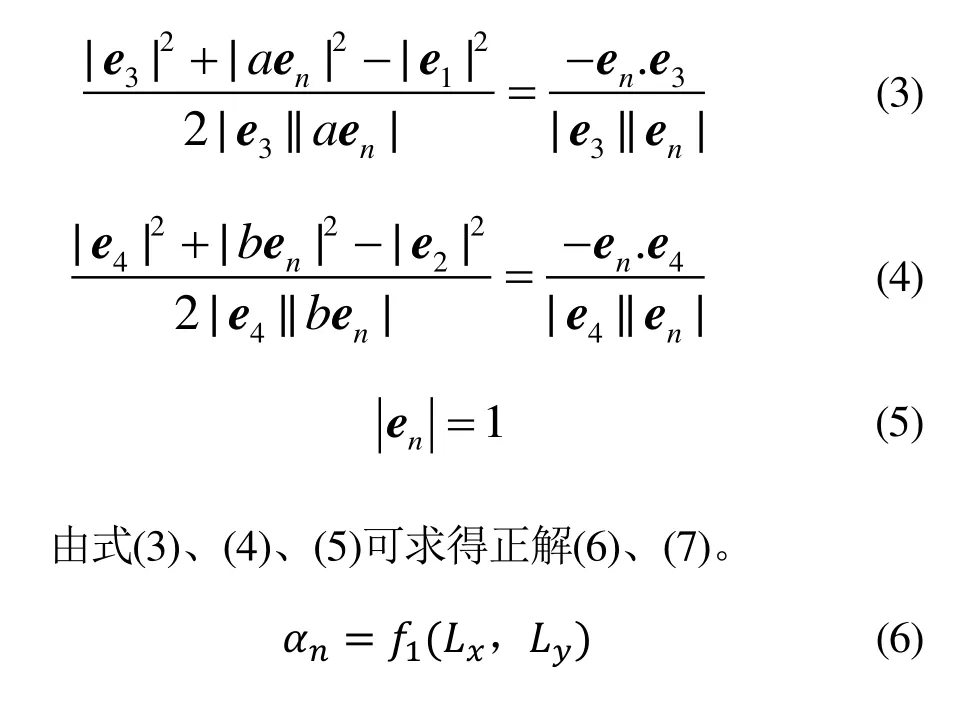

运动学逆解:即已知反射镜法向en,求解Lx、Ly。
由式(6)~式(10)可求得逆解式(11)、式(12)。
根据现有机械结构尺寸以及所选音圈电机参数求得扫描平台运动正解,图9为式(6)的求解,图10为式(7)的求解,图11为式(11)、式(12)的求解。
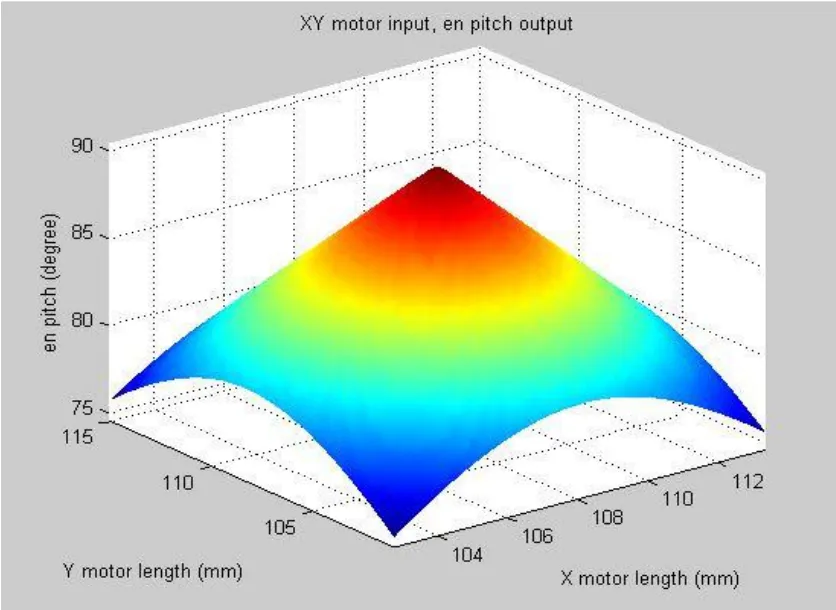
图9 俯仰角关于电机伸长量的运动学正解
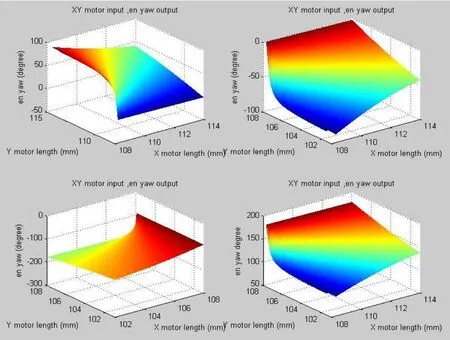
图10 偏转角关于电机伸长量的运动学正解
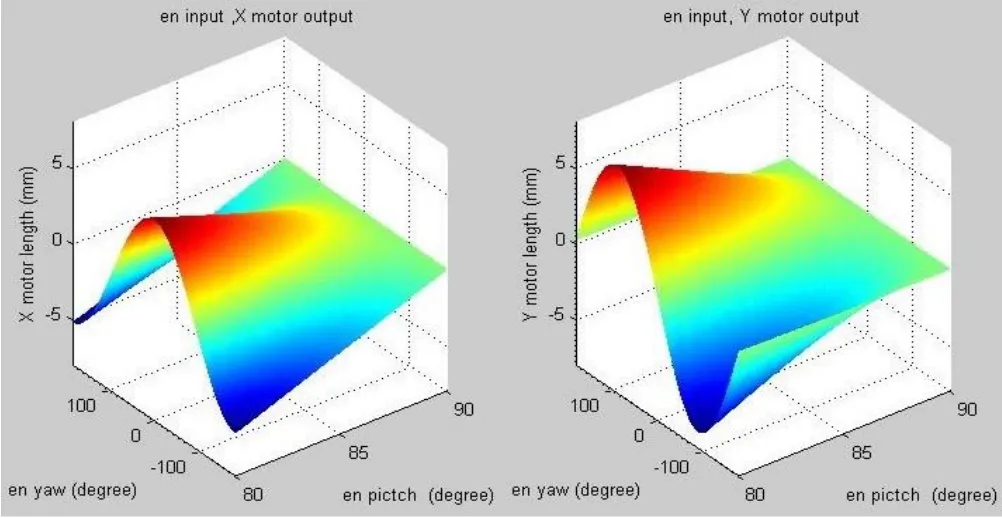
图11 运动学逆解
3.2 仿真分析
通过ADAMS进行运动仿真,模拟电机输出运动为简谐振动时,反射镜输出的角速度和角加速度以及电机输出的推力。X、Y方向电机动子输出轨迹的运动方程为式(13)、式(14),振动频率f, 最大振幅L0,即空间扫描范围最大,所选音圈电机的技术参数如表1所示。


表2 不同扫描频率下,反射镜角速度、角加速度以及电机的推力
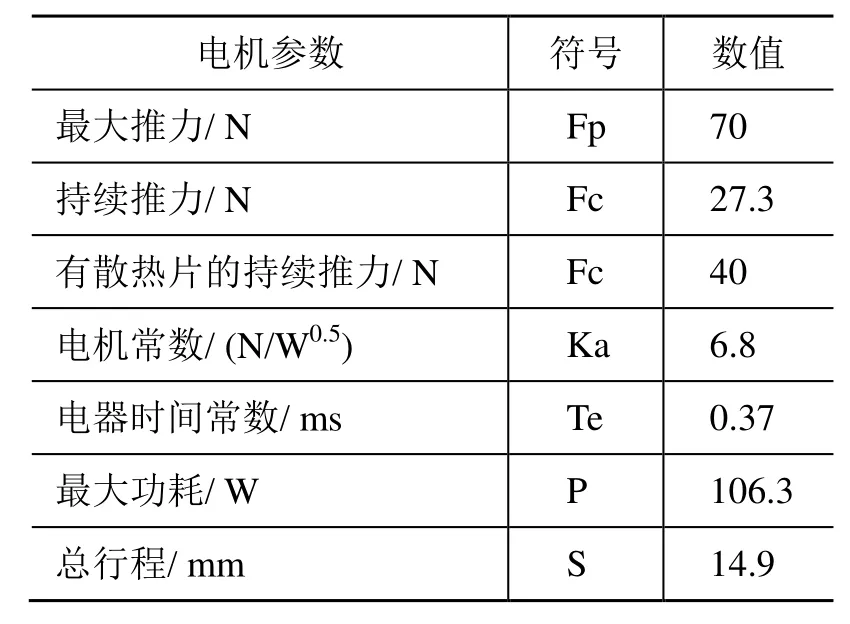
表1 音圈电机技术参数
理想状态时,不同扫描频率下,反射镜的峰值角速度、峰值角加速度以及电机需输出的峰值驱动力的仿真结果如表2所示。所选电机在加装散热片的条件下可提供40 N的恒定推力,当反射镜以20 Hz的速度进行扫描时,两直线电机所需提供的推力分别为23.06 N和16.91 N。考虑到机械结构中连接部分采用滚动轴承和自润滑关节轴承,摩擦阻力相对较小,电机至少可以提供满足反射镜以20 Hz频率扫描最大范围所需的推力。
4 结论
基于本文所提出的两自由度球面并联机构,以直线音圈电机为驱动设计的扫描平台,较单轴组合形式的高速扫描平台,减少了双镜所带来的光束衰减,同时消除累积误差;较串联机构形式的扫描平台,具有更高的扫描速度和更高的刚性;同时运动范围内无扫描盲区,较现有并联结构形式的快速反射镜提高了扫描范围。通过理论计算、仿真分析,证明了本文所设计的扫描平台具有结构简单、高速、高精度,所需结构易于加工的特点。基于本文提出的并联机构实现扫描运动,为两自由度扫描平台的设计研究提供了一种新的实现方式。
[1] 文世峰.选择性激光烧结快速成形中振镜扫描与控制系统的研究[D].武汉:华中科技大学,2010.
[2] 汪逸群,齐心达.国外空间光学扫描机构现状[J].光机电信息,2010,27(12):15-20.
[3] 周子云,高云国,邵帅,等.采用柔性铰链的快速反射镜设计[J].光学精密工程,2014,22(6):1547-1554.
[4] 李占贤,杨志杰,于江.移动副驱动的2-DOF球面并联机构运动学分析[J].机械设计与制造,2011(11):216-218.
[5] 王大珩.现代仪器仪表技术与设计[M].北京:科学出版社, 2001.
[6] 高经伍,赵凤华.PSD传感器的原理及应用[J].国外电子元器件,2002(8):19-20.
[7] 程刚,万勇健,葛世荣.3-RPS对称并联支撑结构误差灵敏度研究[J].光电工程,2009,36(9):146-150.
[8] Wang Dazhi. Design of leveling stages with six point supports using two actuators via exact constraint [D]. Beijing, Chinese Academy of Science, 2012.
[9] 吴巍.一种两自由度并联机构位置分析与仿真[J].机械设与制造,2011(5):113-115.
Design of High Speed Parallel Optical Scanning Platform
Li Kaige Huang Dan
(Guangdong Institute of Automation Guangdong Key Laboratory of Modern Control Technology Guangdong Open Laboratory of Modern Control & O-M-E Technology)
This paper proposes a new two DOF spherical parallel mechanism and analyze the degree of freedom. A high speed optical scanning platform is designed based on the parallel mechanism which has been proposed in the paper. In order to achieve high speed scanning motion the scanning platform is driven by two linear voice coil motors. To form the dual closed loop servo control the linear grating sensor and two-dimensional PSD sensor is used as feedback. Mathematical model is built and the feasibility of this design is verified by ADAMS kinematics and dynamics simulation.
Scan; Parallel Mechanism; PSD Sensor; Voice Coil Motor
李凯格(通讯作者),男,1986年生,硕士研究生,主要研究方向:精密机械结构设计。E-mail: kg.li@foxmail.com
广东省科学院优秀青年科技人才基金(rcjj201504);广东省自动化研究所所长基金(C201401)。
黄丹,女,1978年生,硕士研究生,主要研究方向:自动化与信息技术。
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
现代仪器与医疗(2021年1期)2021-06-09 05:53:58
河北省科学院学报(2020年1期)2020-05-25 06:57:18
环境技术(2020年1期)2020-03-06 11:41:02
测控技术(2018年1期)2018-11-25 09:43:24
制造技术与机床(2018年11期)2018-11-23 01:07:50
电子测试(2018年18期)2018-11-14 02:30:32
传感器与微系统(2018年7期)2018-08-29 00:44:36
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
