
“自动控制原理”课程中的多元化案例教学
2015-07-04 11:30宫二玲孙志强
电气电子教学学报 2015年2期
宫二玲,孙志强,沈 辉
(国防科学技术大学机电工程与自动化学院,湖南长沙410073)
0 引言
“自动控制原理”是国内外众多工科院校均开设的一门课程,涉及到控制、电气、机械、通信、仪器和能源动力等传统专业。随着学科的大规模交叉融合,反馈控制的思想得到越来越广泛的应用,因此为数众多的数学、生物和经济类专业的学生也纷纷选修该课程。
由于课程理论性强,涉及多方面的数理知识,较为抽象,具有一定的深度和难度,教学过程中容易出现教师难教学生难学的情况。而从教学效果上看,课程结束时学生往往只记得一些分析方法的大致思路,遇到具体的控制对象仍然无从下手,更谈不上设计控制器,改善系统性能。
分析上述现象,我们认为主要原因在于教学过程从理论到理论,没有将自动控制的基本原理落到实处,落到具体的控制系统中去,为解决此问题有必要将学生感兴趣的典型案例引入到教学过程中。考虑到我校的教学对象均是军校学员,将来的工作必然与武器装备密不可分,因此选择高炮随动控制系统作为典型案例,开发了多元化的教学素材[1-2],循序渐进地贯穿于整个教学过程中,收到了令人欣喜的教学效果。
1 高炮随动控制系统案例的选择
案例教学法起源于1920年代,最初由美国哈佛商学院在商业管理课程中进行了尝试。它一般要求围绕一定的教学目的把真实的情景加以典型化处理,形成供学员思考分析和决断的案例,通过独立研究和相互讨论的方法,提高学员分析问题和解决问题的能力。案例教学法在当今世界的教育和培训中受到普遍重视和广泛的应用。
在案例教学中,典型案例的选取非常重要,一般来说,案例选取应遵循如下三大原则[3]:①案例内容应能基本涵盖课程的绝大部分知识点,在有一定深度、难度的基础上具有一定的综合性,不应太简单;②选取的案例应该是学生感兴趣或熟悉的,因为兴趣能够产生强烈的求知欲,也是能够坚持学下去的最大动力;③案例研究的结果和结论应该具有直观的效果,学生经过一定的探讨会有成就感,能真正掌握系统设计的基本方法。
考虑到所在学校的军校性质,学生毕业后大多分配到部队基层担任指挥军官,从事武器装备的使用与维护工作。因此,相比较其它工科院校常用的倒立摆、磁盘驱动、小车转盘等控制系统,我们更倾向于选择武器装备中的典型控制系统作为案例[3-5]。存在的挑战是目前还没有哪所院校做过这样的尝试,因此没有现成的例子可以照搬,需要我们从自己的科研经历或者广泛的调研着手,进行提取、凝练和深化,形成适合课程教学的多种素材,并在教学过程中认真实施,才能达到较好的教学效果。
纵观现有的武器装备,可谓种类繁多,特别是高科技成分含量高的新型武器装备更是层出不穷。考虑到自动控制原理是控制系列的入门课程,重点讲授内容是经典控制理论,而且授课对象一般是大三学生,专业理论知识学习还不够深入,因此我们舍弃了诸如导弹制导与控制系统、航空器飞行控制系统和机器人控制系统等复杂案例,而选择了高炮随动控制系统作为该课程的典型案例。虽然该系统本身具有高低角、方位角以及射程等诸元需要控制,但考虑到高低角与方位角控制的相似性和可解耦性,完全可以提取出其中任何一个单独作为案例进行研究[6]。例如,方位角随动控制系统的工作原理如图1所示。其中的各部件通过分析可以得到其传递函数,从而得到整个系统的传递函数模型。在该数学模型的基础上,完全可以应用经典控制理论进行系统的分析和设计。
2 多元化案例的素材准备和实施
为了更好地应用高炮随动控制系统的案例,我们进行了如下五个方面的工作。
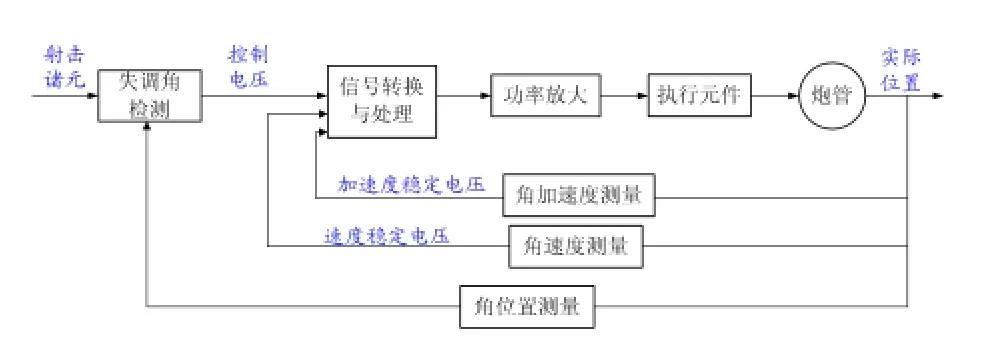
图1 方位角随动控制系统的工作原理
1)装备调研
为了使案例的讲解更生动、更有说服力,我们专程赴某军械士官学校调研,实地考察了多种型号高炮系统的运行情况,现场拍摄了它们运行的视频以及系统各部件的图片,取得了系统的说明文件及整体电路图。
2)教材编写
在装备调研的基础上,我们着手编写本科生教材《自动控制原理—模型·分析·设计》,将高炮随动控制系统作为实例贯穿于整部教材。该教材分为模型篇、分析篇、设计篇三大部分。
在模型篇中,通过对高炮方位角随动控制系统的分析,首先得到其中各元器件的传递函数模型,进而得到不同反馈情况下系统的方框图模型,最后整理出系统的传递函数模型、状态空间模型和频率特性模型。
在分析篇中,基于这些模型对系统的稳定性、瞬态性能、稳态性能采用多种方法展开分析,并比较只有角位置反馈、角位置和角速度同时反馈、角位置/角速度和角加速度同时反馈三种情况下系统各方面性能的差别。通过比较可以看到,反馈形式越复杂,系统的瞬态和稳态性能可以调整得越好。实际情况中,历史越久远的高炮系统由于技术落后,反馈形式简单,在炮管的调转过程中往往要经历大幅度的摆动和多次振荡后才能到达指定位置。而在新型的高炮系统中,由于采用了多种形式的反馈,火炮的调转过程往往迅速而且晃动小,在我们拍摄的视频中可以清晰地看到这种差别。图2所示是含有三种反馈形式的方位角随动控制系统框图,图3所示为在阶跃信号输入时不同反馈形式下系统的响应曲线(系统1:只有角位置反馈;系统2:角位置/角速度同时反馈;系统3:角位置/角速度/角加速度同时反馈)。
可以看到只有角位置反馈时,系统的超调量大,且振荡次数多;而三种反馈同时应用时,系统的瞬态过程非常平稳,调节时间也只有1秒左右。通过这样的比较,可以使学生清楚地了解反馈在实际控制系统中的重要作用。
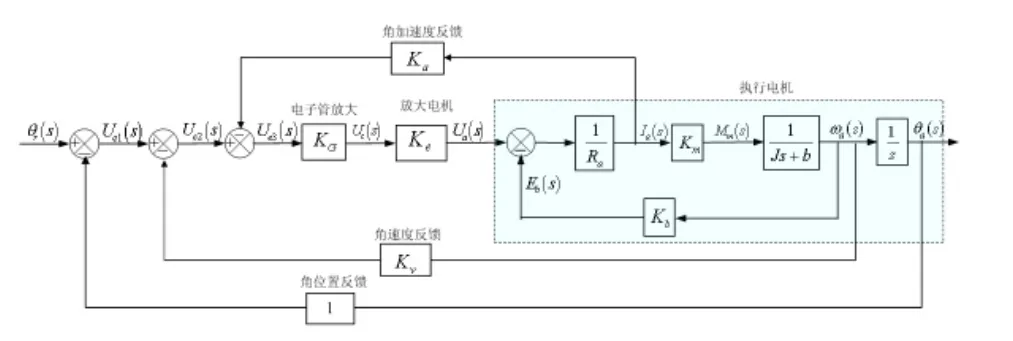
图2 不同反馈形式的方位角随动控制系统

图3 不同反馈形式下系统的单位阶跃响应
在设计篇中则根据具体的性能指标要求,用教材中介绍的超前校正、滞后校正、PID校正等方法,调整控制器的取值,以满足系统设计的要求。
可见,教材中各部分介绍的理论知识都可以仿照方位角随动控制系统的案例得到应用,以此加深学生对理论知识的理解并达到熟练应用的程度。
3)课件制作
与教材编写的思路相同,我们制作了相应的PPT课件,以便课堂上讲授。课件分为公开和内部两部分,公开课件包括理论知识和非涉密的随动控制系统介绍,而内部课件则包括多种型号装备拍摄的视频、图片以及分析数据。内部课件只在课堂上播放,而不拷贝给学生。
4)课堂讲授
课堂讲授的内容和顺序基本与教材编写的相同。由于案例中数学模型的推导、系统性能的分析以及控制器的设计均是理论知识的应用,因此案例这部分的讲授采取了学生为主体的方式,即学生在不翻阅教材的情况下,自行推导、分析和设计,相当于是对理论知识学习的全面检阅。
5)实物实验
多元化的教学案例还包括实物实验,实验开展目前是建立在我校控制实验室现有的小功率随动系统实验装置基础上的,该实验装置的结构与高炮随动控制系统基本相同,包含了角度反馈和角速度反馈信号,并且可以通过模拟机上的放大校正模块和功率放大模块调整反馈系数,设计校正环节。不同的是缺少角加速度反馈环节,而且目前系统中的负载是飞轮。下一步的构想是在直流电机中引出电枢电流信号,以构成角加速度电流环反馈。制作如图4所示的简易火炮模型代替飞轮作为负载,通过系统设计直接控制火炮模型的运转,并通过计算机观察炮管转动的响应曲线。
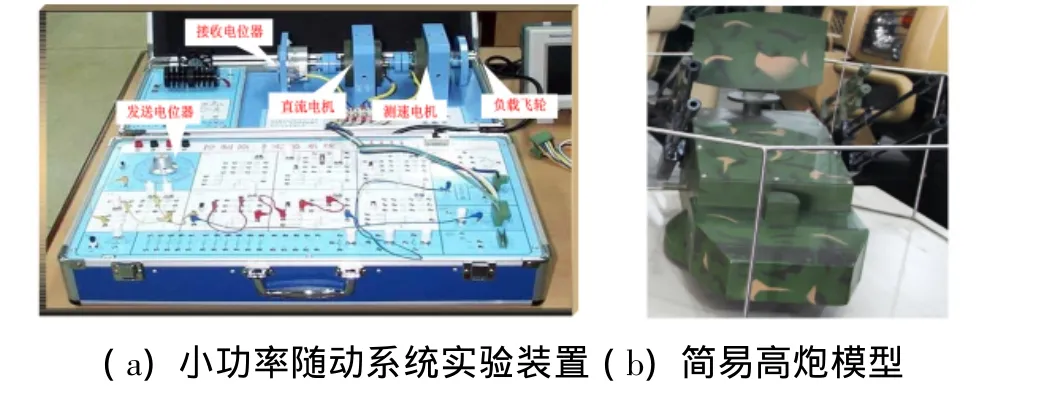
图4 高炮随动控制系统实验平台
3 结语
我校“自动控制”原理课程教学引入高炮随动控制系统作为教学案例,开发了多元化的教学素材,将案例贯穿于整个教学过程中,并辅以实物实验,控制简易高炮模型的运动,使理论知识和应用结合。
在2014年春季学期的教学任务中,已有教师在课堂讲授环节引入了该案例,制作了相应的课件和视频,在每个模块的理论知识讲授完后,引导学生将学到的知识应用到案例中,对高炮随动控制系统进行建模、分析和设计,激发了学生的学习兴趣,达到了良好的教学效果。
[1]徐颖秦,潘丰.自动控制原理立体化教学新体系的探索与实践[J].天津:电力系统及其自动化学报,2012,24(2):
[2]张瑞成,王福斌,陈至坤.自动控制原理课程立体化教学体系研究与实践[J].北京:实验技术与管理,2013,30(9)
[3]黄玲,赵阳,王海英.案例教学在自动控制原理教学中的应用[J].石家庄:教育教学论坛,2013,8
[4]夏静萍,王瑛.自动控制原理实验教学探究-基于实物命题的递进式教学法[J].上海:实验室研究与探索,2013,32(12)
[5]孙大卫,丁兴俊,毕经存.一种典型自动控制原理实验教学设备研究[J].北京:实验技术与管理,2011,28(7)
[6]吴萍,刘正生.火炮控制系统计算机仿真研究的新发现[J].太原:火力与指挥控制,2007,32(9)
猜你喜欢
黑龙江气象(2021年2期)2021-11-05
军事文摘(2020年15期)2020-08-15
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
现代兵器(2017年4期)2017-06-02
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
科教导刊·电子版(2016年30期)2016-12-26
大学教育(2016年11期)2016-11-16
