
三维激光扫描技术在地下建筑三维建模中的应用研究
2015-07-04 13:00徐贺张文春林楠吉林建筑大学测绘与勘查工程学院吉林长春130118
城市勘测 2015年6期
徐贺,张文春,林楠(吉林建筑大学测绘与勘查工程学院,吉林长春 130118)
三维激光扫描技术在地下建筑三维建模中的应用研究
徐贺∗,张文春,林楠
(吉林建筑大学测绘与勘查工程学院,吉林长春 130118)
摘 要:地下建筑的三维建模日益受到人们重视,本文以长春市某地下车库为实例,对其进行三维建模,介绍了利用三维激光扫描技术进行地下车库三维建模的方法,分析了点云数据的测量精度。结果表明,与传统方法相比,建模的精度和效率都有很大提高,对地下建筑的三维建模具有借鉴意义。
关键词:三维建模;地下工程;三维激光扫描;点云数据
1 前 言
随着信息技术的发展,数字城市的建设在全国已经形成一个势不可挡的浪潮[1],城市空间信息的获取成为数字城市的基础工程[2]。近年来,城市空间信息的获取以及建筑物的三维建模多集中于地上部分,而地下空间信息的获取由于受到技术和方法的限制而少有人研究。随着远程激光扫描仪的发展,三维激光扫描技术越来越多地应用到测绘领域,大大解决了这一难题。
地下建筑的三维模型构建日益受到人们的重视。传统的测量方法是利用全站仪或GPS进行地下建筑的数据采集,但由于某些地下建筑地形复杂,且无法接收GPS卫星信号,因此该方法既费时又费力,很难实现。作为现代高精度传感技术,三维激光扫描仪可以深入到复杂的环境中进行扫描操作,并直接将地形复杂的、不规则实体的三维数据完整地采集到计算机中,从而快速构建出被扫描物体的三维模型。本文以长春市某地下车库为实例,采用Z+F IMAGER 5010C三维激光扫描仪进行测量,建立地下车库三维模型,分析了地下车库三维模型的误差以及点位精度的评定,对地下建筑的三维建模具有借鉴意义。
2 工程概况与技术流程
2.1工程概况
测区位于长春市某小区地下车库,车库总面积大约4 000 m2,分别有一个入口和一个出口。测区概况平面图如图1所示。
2.2技术流程
基于三维激光扫描仪的地下车库建模和精度分析主要分外业数据采集、内业数据处理和精度分析三部分。主要工作流程如图2所示。
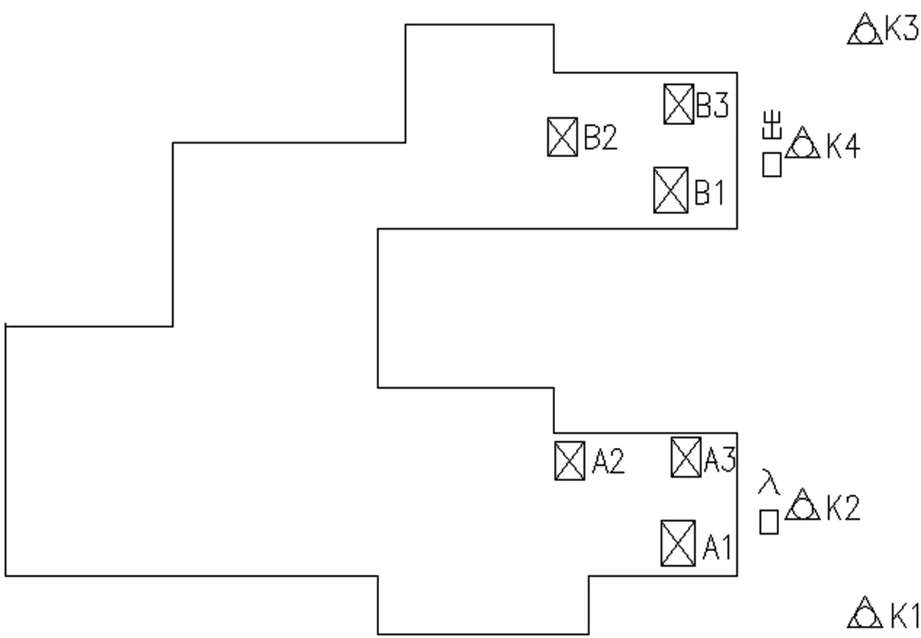
图1 地下车库概况平面图
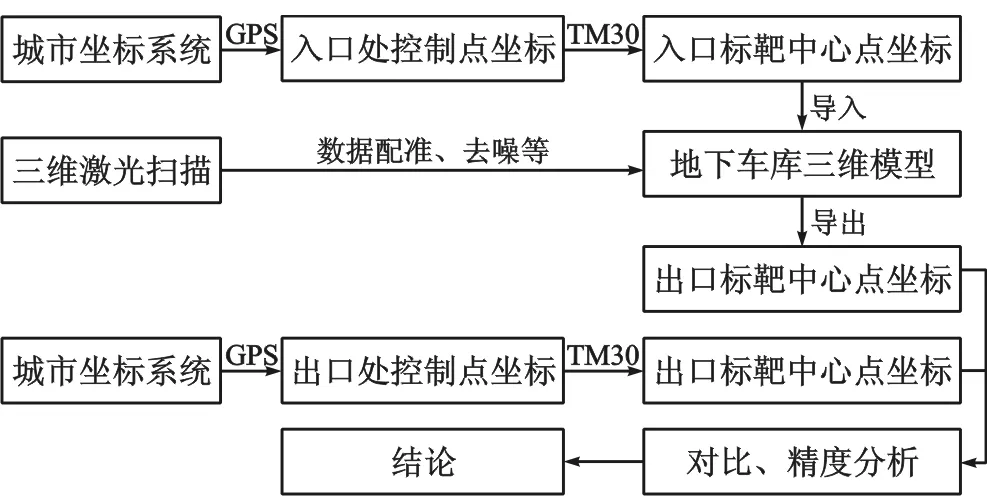
图2 地下车库三维建模及精度分析技术流程图
3 三维激光测量数据采集
3.1三维激光扫描仪工作原理
三维激光扫描仪系统本身主要包括激光测距系统和激光扫描系统,同时也集成CCD和仪器内部控制和校正系统等。在仪器内,通过两个同步反射棱镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,测量每个激光脉冲从发出经被测物体表面再返回仪器所经过的时间(或相位差)来计算距离,同时扫描控制模块控制和测量每个脉冲激光的角度,最后计算出激光点在被测物体上的三维坐标,三维激光扫描测量仪原理如图3所示[2]。

图3 三维激光扫描仪工作原理
本次三维扫描项目采用德国Z+F IMAGER 5010C设备,该扫描仪是相位式三维激光扫描仪。相位式扫描仪扫描距离近,但是扫描速度快、精度高,最高精度可达0.3 mm,有效测量距离可达187 m。设备内置相机可生成一站8 000万像素的高分辨率影像数据,角度分辨率水平达到0.000 2°垂直0.000 4°。IMAGER 5010C的激光是波长为1.5 μm的一级激光,激光垂准仪能够使仪器精确的定位在已知坐标点上,即使在光线昏暗的地下车库中也可以清晰地扫描地物。该仪器具有极高的扫描速率,可达每秒1 016 027个点,极大地提高了工作效率。
3.2控制测量
(1)控制点及标靶的布设
对地下车库入口和出口外周围的环境进行踏勘,选择在入口和出口外各确定一个控制点,分别命名K2 和K4,距K2和K4较远且通视处确定两个控制点K1 和K3,用于确定后视。在入口和出口处分别贴3张与扫描仪配套的标靶纸,分别命名为A1、A2、A3,B1、B2、B3。使K2与A1、A2、A3通视,K4与B1、B2、B3通视,便于后续扫描坐标与地方坐标的结合,如图1所示。根据三维激光扫描仪的特性,仪器无法精准扫描法向量与激光接近垂直的地物,所以张贴标靶纸时尽量减小每组标靶纸中心的法向量与仪器发射激光束的交角。另外,为使模型的坐标更加准确,每组标靶纸应贴于不同的平面上。
(2)控制点及标靶坐标的获取
基于长春市CORS系统利用南方S82-T GPS接收机,精确测得K1、K2、K3、K4城市坐标系统中的坐标,为后续地下车库的三维模型整体坐标提供基础。以K1为后视点,在K2处架设徕卡TM30测量机器人, 对A1、A2、A3标靶纸中心点进行观测,得到标靶中心点的坐标,同理可测得B1、B2、B3标靶中心点坐标。
(3)扫描过程
三维扫描仪的外业非常简单,只需要设立标靶和外业扫描两步即可。摆设标靶时尽量合理布局,使最少的摆站能够扫描最全面的数据。此次试验,用于两站之间拼接的球形标志为Z+F IMAGER 5010C仪器配套的球形标志,扫描仪发射的激光可自动识别球形标志。根据地下车库的特点及周围环境,确定球形标志的安放位置。一个测站中,球形标志在测站的两侧均有放置,每一侧放置3个球形标志,使之在后期的数据处理中可以有所选择,试验中两站公共球形标志数量为3个。为保证测量精度,每两站之间距离控制在100 m以内。确定好标志安放位置和仪器安放位置后,架设仪器,打开电源,扫描仪预热后设置参数(质量、分辨率等),扫描仪自动进行扫描,依次完成每站的扫描工作,最后实验完成后测站数目共有12站。
4 三维激光测量数据处理
三维激光扫描仪的内业工作分为基本处理和后处理两部分。基本处理是将从三维扫描仪上导出来的数据进行拼站处理、导出数据等。后处理是根据实际需求生成线画图或者三维建模数据,要得到这样的数据需要进行滤波去噪、抽稀、矢量提取、点云封装、三维建模等过程。
4.1点云的基本处理
点云配准是点云数据获取后的第一步处理,也是所有后续处理的基础,因此,配准的精度将直接关系到建模精度[3]。由于物体的遮挡、扫描仪的限制等原因,要完成对地下车库的完整三维数据获取,扫描仪需要多测站多角度进行扫描。但在不同测站进行扫描的坐标系不同,因此需要通过点云配准将多站扫描数据拼接到同一坐标系下,以获得物体表面的完整的形状信息[4]。
地下车库表面点云的空间信息位于相对坐标系中。扫描完成后,通常要把相对坐标系转化为国家统一坐标系或者是地方独立坐标系。两个空间直角坐标系的坐标变换的参数一般包括3个平移参数、3个旋转参数和1个尺度变化参数,这里两个坐标系的尺度相同,即两个空间直角坐标系之间的变化有6个独立的参数,采用迭代法来解决非线性三维基准变换[5]。
此次试验选择Z+FLasercontrol软件对扫描得到的12站点云数据进行坐标转换和数据配准,过程如图4、图5所示。
所有标志标定完成后,对工程进行最小二乘法进行标定,将TM30全站仪测量得到的标靶纸中心坐标赋予模型作为转换的基础数据。标定、转换完成后,生成标定报告,标靶纸以及球形标志的标定报告如表1所示。

图4 标靶纸中心坐标的标定

图5 球形标志的标定
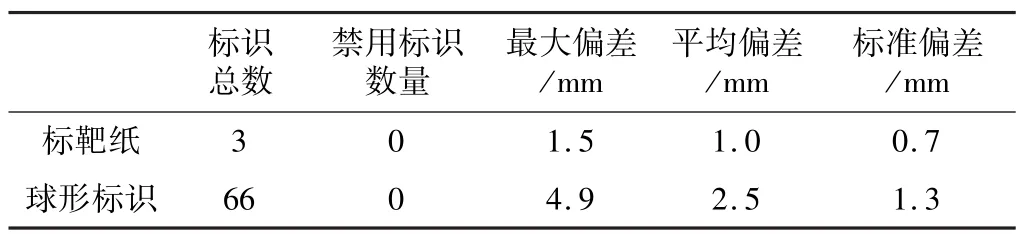
标靶纸以及球形标志的标定报告 表1
从表1可以看出,标靶纸中心坐标相对于全站仪坐标数据的平均偏差为1.0 mm,标准偏差为0.7 mm,最大偏差是1.5 mm;球形标志中心坐标平均偏差为2.5 mm,标准偏差为1.3 mm,最大偏差为4.9 mm,这完全满足工程测量中的精度要求。
4.2点云的后处理
三维激光扫描仪进行工作时,建筑物周围的树木、行人、车辆等易对扫描造成遮挡,造成不必要数据的缺失。采用多测站多视角观测后,弥补了数据的缺失,但是会造成数据的冗余。这些冗余数据不仅增加了计算机的内存,而且降低了数据处理的效率,所以需要对点云数据进行滤波处理,剔除掉冗余数据,提取地下车库的点云数据。如图6所示,利用Z+FLasercontrol软件对数据进行滤波、去除噪声等操作,直接得到地下车库的三维模型,如图7所示。
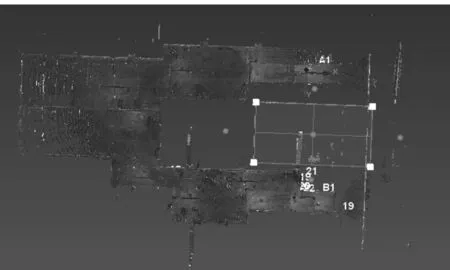
图6 数据滤波、剔除噪声

图7 滤波后的地下车库三维模型
5 精度分析
地下车库三维建模完成后,对出口处的标靶纸中心坐标进行提取,与TM30全站仪采用无棱镜方法测得的坐标进行对比分析,计算出每个标靶纸中心的偏差,如表2所示。

出口处标靶纸中心坐标偏差 表2
结合以上分析可以看出,地下车库模型处标靶的最小误差为1.6 mm,最大误差为6.2 mm,平均误差为3.2 mm,可以判断点云拼接模型的数据各项精度指标良好,完全满足地下工程的数据精度要求。
6 总 结
本文对利用三维激光扫描技术进行地下建筑三维建模的流程进行了详细的描述,并以地下车库为实例,验证了三维激光扫描技术在地下建筑三维建模过程中的可行性。结果表明,模型的精度误差控制在±7 mm之内,满足地下工程测量的精度要求。同时,与传统测量方法相比,三维激光扫描技术表现出精度高、效率高等优点,减轻了测量工作人员的强度,为地下工程测量提供了新途径。
参考文献
[1] 李德仁,朱庆,李霞飞.数码城市:概念、技术支撑和典型应用[J].武汉测绘科技大学学报,2000,25(4):283~288.
[2] 吴静,靳奉祥,王健.基于三维激光扫描数据的建筑物三维建模[J].测绘工程,2007,16(5):57~60.
[3] 陈三清.点云数据的配准方法研究[J].光盘技术,2009.
[4] 徐源强.高井祥,张丽等.地面三维激光扫描的点云配准误差研究[J].大地测量与地球动力学,2011,31(2):129~132.
[5] 陈义,沈云中.非线性三维基准转换的稳健估计[J].大地测量与地球动力学,2003,23(4):49~53.
Research on the Application of 3D Laser Scanning Technology in the Construction of 3D Modeling of Underground Building
Xu He,Zhang Wen Chun,Lin Nan
(School of Geomatics and Prospecting Engineering,Jilin Jianzhu University,Changchun 130118,China)
Abstract:Underground structures of 3d modeling attracting increasing attention,this article takes an underground garage in Changchun city as an example to construct 3d modeling of it,introduces the way of using 3d laser scanning technology to build 3d modeling of the underground garage, and analyze positional accuracy of the method.Results show that compared with the traditional method, the precision and efficiency are greatly improved, and instructive to the underground construction of the 3d modeling.
Key words:3d modeling;underground engineering;3d laser scanning;pointcloud data
文章编号:1672-8262(2015)06-82-04中图分类号:P234.1
文献标识码:A
收稿日期:∗2015—10—08
作者简介:徐贺(1990—),男,硕士研究生,研究方向:三维激光扫描仪的应用。
基金项目:吉林省科技发展计划基金资助项目(20120437)
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
文萃报·周五版(2021年45期)2021-11-17
建材发展导向(2021年9期)2021-07-16
模具制造(2019年3期)2019-06-06
测绘通报(2017年2期)2017-03-07
海外星云(2016年7期)2016-12-01
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
创业家(2015年6期)2015-02-27
自动化博览(2014年6期)2014-02-28
