
基于Windows+RTX 的便携式无人机测试系统设计与实现
2015-07-01 07:55薛艳峰
兵器装备工程学报 2015年2期
薛艳峰
(中国人民解放军92419 部队,辽宁葫芦岛 125106)
无人机在国内军事和民用方面应用日趋广泛,与此同时,无人机的技术水平、复杂程度也越来越高,自主导航、远程遥控、航线再规划等技术被广泛应用。对于完成无人机地面技术准备、指标测试的设备得到了关注,用户对其功能和要求也在逐步提高,特别是在军事应用领域,“无人机系统”概念的不断深入和“六性”设计被广泛要求的情况下,地面测试设备不再是配套附属地位,已成为衡量一套无人机系统保障性的重要部分。
本文区别于上下位机的应用系统实现方式,研制了1 套基于Windows +RTX 操作系统的PXI 总线便携式计算机为核心的无人机测试系统,将无人机技术准备过程中的单项、综合及仿真测试工作集成到1 台计算机中,保证了仿真测试实时性要求,同时也降低了系统复杂度,提高了维修性,更好地贴近了用户提出自动化、便携性、通用性等要求。
1 测试需求分析
1.1 无人机基本工作原理
该型无人机系统主要包括无人机、地面测试系统、地面保障设备、地面指挥测控站等,其中无人机主要由机体、动力分系统(包括涡喷发动机、ECU、燃油系统和进气道)、飞行控制与管理分系统、电气分系统、遥控遥测分系统和回收分系统等组成。全系统机载设备信息交换原理如图1 所示。
飞行控制与管理系统是无人机完成飞行任务的核心,包括飞行导航与控制计算机、卫星+捷联惯性组合导航系统、无线电高度表、大气数据系统(包括大气数据计算机、总静压管)、舵机等构成。飞行导航与控制计算机采用数字信号的形式,通过ECU 控制供油油量,得到发动机转速,实现对发动机的闭环控制。飞行导航与控制计算机负责飞行控制、飞行管理以及机载设备管理等任务,具有自主飞行和人工遥控飞行2 种飞行模式,并配合测试设备完成全机指标性能测试。
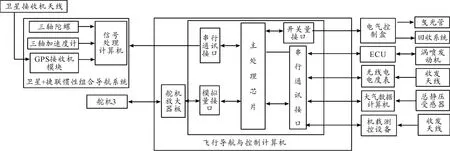
图1 无人机机载设备信息交换原理
1.2 测试需求分析
无人机地面技术准备测试主要包括对无人机机载涉电设备的单项测试、综合测试和仿真测试。上述测试基本实现了对无人机的基层级测试工作,可确定无人机功能和性能指标是否满足技术要求,可将故障定位到机载可更换单元,具体测试内容及要求如下:
单项测试包括电气单项测试、回收系统单项测试、飞控系统单项测试、发动机单项测试。其中飞控系统单项测试包括组合导航系统测试、大气数据计算机定点和动态测试、无线电高度表单项测试、舵系统单项测试、主传动比测试等,通常安排在设备装机后进行。
综合测试主要通过模拟无人机全过程飞行流程,检查全机电气连接的正确性,检验各分系统间信息交互正确性,通常安排在单项测试后进行,也通常应用于无人机技术状态固化后,远距离转场或较长时间未飞行的节点测试。
仿真测试主要用于检验和测试无人机的核心设备(飞控导航与管理计算机)的功能、策略是否正常,规划的航路是否与无人机飞行特性吻合,并检验其在边界条件、干扰环境下的飞行特性、飞行导航是否满足要求等。
2 系统设计
2.1 系统硬件组成
基于集成化、自动化、通用化、便携性的设计理念,本系统设备主要包括测试计算机,以及程控直流电源、大气数据测控仪、陀螺仪表综合试验转台、无线电高度信号测试仪等通用仪器仪表和用于设备连接的接口箱、配套电缆等。
测试计算机机箱采用了PS PXI-9106。该机箱兼容PXI和CompactPCI 总线模块,其中1 槽为系统控制器槽位,可配合最大三槽宽的嵌入式控制器使用。机箱内配置了1 块控制器、1 块多功能数据采集卡、2 块串口卡。其中控制器采用了PS PXI-3051 型高性能控制器,采用Intel 酷睿i5 双核处理器,基础主频2.7 GHz,集成256G SSD 硬盘,4GB DDR2 内存,集成了2 个千兆以太网口,2 个视频输出端口。多功能数据采集卡采用了PS PXI -3354 型采集卡,板卡提供16 路18bit、1.25MSPS 采样率模拟输入通道,4 路16bit、200kSPS 更新率同步模拟输出通道,16 路DIO,2 路最大计数频率120MHz、位宽32bit 的计数器。模拟输入输出、数字输入输出及计数器与主控侧电路采用了电气隔离,有效防止了被测量系统共模电压的引入,隔离耐压大于560 V,适用于高可靠性,高安全性的自动化测试测量以及数据采集应用。串口卡采用了PS PXI-3510 智能串口卡,可提供8 路异步串口,每通道串口模式可独立配置,支持RS -232/422/485,232 可达1Mbps 通信速率,422/485 可达10Mbps 通信速率。
该测试计算机采用了一体化结构设计,集成了12.1 英寸LCD 液晶触摸屏及键盘、触控板、触控笔等,可通过定制的适配器,以BNC,SMA,圆形航空插头,大规模互联接口等方式与其他设备进行信号连接。根据使用场合要求,本设备采用了圆形航空插头形式的适配器,将板卡输入输出与接口箱进行相连,保证了设备的可靠连接、提高了设备的操作性。
程控直流电源用于测试过程中对机供电,大气数据测控仪用于大气数据计算机测试过程中的标准气压源,陀螺仪表综合试验转台用于测试惯性组合导航系统过程中性能的基准平台,无线电高度表测试仪采用延时线的方式,实现了不同高度的模拟。上述通用仪器仪表均可以采用RS422/485通信进行自动控制。
2.2 软件系统设计
1)单项测试和综合测试软件
测试软件由LabVIEW 开发而成,采用分层调用的形式实现。它是面向流程的软件设计,并不是采用结构化编程方式的设计。软件结构共分3 层:第一层为应用层,为主程序模块,用于调度相应的软件任务;第二层为连接层,由硬件功能模块和应用功能模块组成,用于连接应用层与底层驱动;第三层为接口模块,为底层仪器的驱动函数,完成对仪器设备的配置和交互。
LabVIEW 是一种用图标代替文本行创建应用程序的图形化编程语言,采用数据流编程方式,程序框图中节点之间的数据流向决定了VI 及函数的执行顺序。该软件提供很多外观与传统仪器(如示波器、万用表)类似的控件,可用来方便地创建用户界面。用户界面在LabVIEW 中被称为前面板。前面板创建完毕后,便可使用图形化的函数添加源代码来控制前面板上的对象。在程序框图上添加图形化代码,即G 代码或程序框图代码[1-2]。
2)仿真测试软件
仿真测试软件按照功能划分成非实时部分和实时部分,分别运行在Windows 7 平台和RTX2011 实时子系统上,采用了实时信号量和共享内存的方式实现了2 部分的有机结合。非实时部分主要包括人机界面、结果处理等,实时部分主要包括无人机动力学仿真和机载设备仿真等。
软件实时部分仿真建模采用了Simulink/RTW 开发工具,生成源代码后下载至RTX 实时子系统中。RTW 是MATLAB 图形建模和仿真环境Simulink 的一个重要的功能补充模块,是一个基于Simulink 的代码自动生成环境,可直接从Simulink 模型中产生优化的、可移植的和个性化的代码,并根据目标配置自动生成多种环境下的程序。
RTX2011 是WINDOWS 的一个插件,是一个真正的扩展,也没有影响、修改它的基础,其中包括RTSS 实时子系统。其实时功能可以按照WindowsXP 驱动开发工具(DDK)和HAL 模型来实现。RTSS 实时子系统调度机制采用优先级和抢占算法,确保了关键线程的上下文切换,可在微秒的范围内转向更高优先级的线程,支持高达32 个处理器,计时器精度最高可达0.001 ns,其在概念上与其他WindowsXP 子系统(例如win32、POSIX、和DOS)相似[3]。
RTX2011 实时系统支持Windows XP、windows7、windows Vista,支持Microsoft Visual Studio2005、2008、2010 集成开发环境,为开发人员提供了一个一体化的开发平台进行开发,极大地简化了开发流程。该实时系统在不增加额外的硬件设备的情况下,把windows 操作系统打造成实时操作系统,与采用上下位机通过以太网进行数据交换的方式相比,实时性更强,比反射光纤网进行数据交换更直接,将硬实时和GUI高级特性集成在同一硬件平台上,明显增加了系统的可靠性,降低了开发和调试难度[4-5]。
2.3 基本工作原理
1)信号采集与激励控制
一般情况下,对模拟量的测量可采用数字万用表或A/D。数字万用表模块的测量范围标称可以达到直流1 000 V,在测量输入范围和测量精度上相比A/D 更适用。扫描A/D 测量方式具有响应快的技术特点,对于精度要求不是很高的测量完全可以胜任。本系统电压测试精度要求不超过0.01 V,对于18 位的采集卡来说完全可以胜任,因此在设计中未考虑采取数字万用表。
测试设备向无人机施加的激励主要包括:对机供电、施加开关量指令、发送指令帧数据、发送舵控电压信号等内容,其通过IO 控制电路、串口卡、DA 输出来实现。
2)飞行仿真
无人机仿真主要包括无人机飞行动力学仿真和无人机仿真,其仿真信息交链关系见图2。飞行动力学仿真主要由以下几个模块组成:气动模块、运动方程模块、质量特性模块、大气模块、风模块、紊流模块等,其根据无人机操纵舵面、发动机推力、人工初始赋值、无人机质量、重心等输入数据,针对无人机气动模型,仿真解算出无人机的高度、空速、俯仰角、经纬度位置等信息,输出到无人机系统仿真模型。
“气动模块”计算无人机的气动系数、气动力和力矩。气动系数是飞行高度、速度、迎角、侧滑角以及速度等飞行参数的函数,不同型号无人机的气动数据是上述飞行参数的函数。本系统采用插值法求取气动系数[6]。
“运动方程”模块解算无人机六自由度非线性全量运动方程,获取无人机的姿态和位置以及其他飞行参数。在该模块中,首先综合无人机所受的各种力和力矩,包括重力、气动力、发动机推力,及其各种力矩,计算沿机体轴的线加速度和角速度,然后应用积分产生无人机的合成速度等。将风和紊流扰动速度加到机体轴线速度上,用来计算飞行轨迹参数[7]。
无人机仿真主要包括机载传感器、舵机、回收分系统等设备的仿真。仿真通常分为总体性能仿真、集成部件仿真。对于该无人机仿真测试系统,采用设备总体性能仿真即可满足系统仿真应用,例如将发动机系统当作一个整体,对其主要输入、输出性能进行建模,视推力和转速为主要输出性能参数,而油门舵机位置作为输入参数来进行仿真。在仿真模型建立过程中,为进一步提高仿真逼真度,在设计过程中也考虑了设备输入输出数据的误差模型、误差外部注入等。
3 测试应用
3.1 单项测试和综合测试
该系统具备手动测试和自动测试2 种模式。例行技术准备过程中,通常采用自动模式,按照设计的测试流程、测试标准对无人机电气设备进行测试。测试完成后,可按照规定的表格输出结果数据,并标识测试结果是否正常。若出现测试结果不正常的情况,可采取手动测试的模式进行单步测试,以确定故障设备及故障类型。在单项测试中,基本实现了单个部件或分系统的测试,例如大气数据计算机、无线电高度表、发动机控制系统等,满足了对无人机可更换单元的故障定位要求。
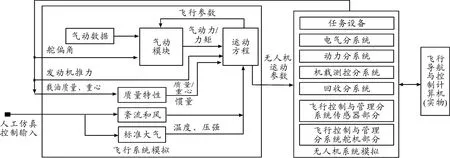
图2 无人机仿真信息交链示意图
测试过程设备连接如图3 所示。
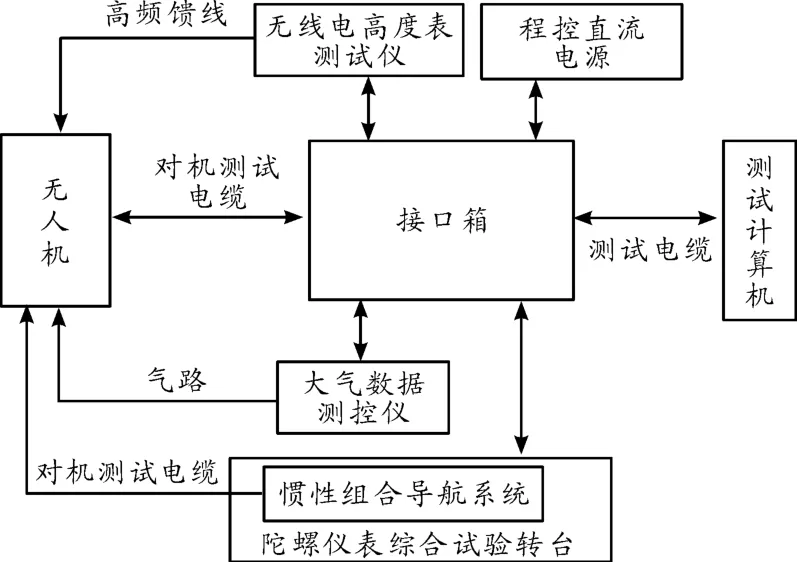
图3 单项及综合测试设备连接示意图
3.2 仿真测试
仿真测试过程中,通过对机测试电缆与安装于无人机上的飞控导航与控制计算机进行相连,实现对其的仿真测试。设备连接如图4 所示。
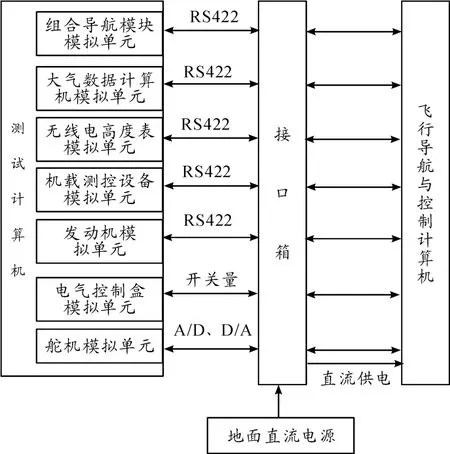
图4 仿真测试设备连接示意图
4 结束语
该系统设计过程中充分考虑了用户实际使用需求,选用了高可靠性、可扩展的PXI 总线计算机,采用数据采集卡替代了常用的矩阵开关+数字万用表的方案,采用了Windows+RTX 的操作系统方案,满足了实时性要求,降低了开发难度。通过实际使用对比,系统测试功能全面,可靠性高,具有较高的借鉴价值[8]。
[1]宋宇峰.Lab Windows/CVI 逐步深入与开发实例[M].北京:机械工业出版社,2003-04.
[2]王晓飞,李岩,刘旺开.基于LabVIEW 的环境模拟试验数据采集系统[J].兵工自动化,2009,28(2):76-78.
[3]孔繁峨,陈宗基.基于RTW 和Vxworks 的飞行控制系统实时仿真[J].系统仿真学报,2007,19(11):2455-2457.
[4]孙玉宝,赵广宁,陶震鹏.基于虚拟仪器的导弹测试自动记录仪设计[J].四川兵工学报,2010,31(5):43-45.
[5]吴佳楠,王伟,周军涛,等.基于RTX 实时模块的飞控系统综合测试系统实现[J]. 测控技术,2010,29(9):72-76.
[6]尹超.基于MATLAB/RTW 和Vxworks 的飞行模拟器实时仿真研究[J].软件导刊,2010,9(12):86-87.
[7]李强,王民岗,杨尧.飞行控制系统快速原型设计与实现[J].计算机测量与控制,2009,17(7):1305-1307.
[8]莫禄,车达生,王宏伟.某型装备继电器系统自动测试设备设计[J].四川兵工学报,2011,32(1):62-64.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
小学科学(学生版)(2021年7期)2021-07-28
幽默大师(2020年11期)2020-11-26
科技传播(2019年22期)2020-01-14
科技传播(2019年22期)2020-01-14
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
消费导刊(2017年20期)2018-01-03
