
考虑部分失效的船用堆安全注射系统多状态可靠性分析
2015-07-01 07:55杨佳宇赵新文郭海宽祁晓周
兵器装备工程学报 2015年2期
杨佳宇,赵新文,郭海宽,祁晓周
(1.海军工程大学,武汉 430033;2. 92267 部队,山东青岛 266231)
核动力系统长期运行过程中一些流体设备如泵、阀门等由于老化等因素存在功能的部分丧失或降额的情况,这些设备虽能完成其功能,但是其传输流量达不到预期性能即发生部分失效[1]。设备发生部分失效后会导致系统处于功能部分降低的中间状态,船用堆安全注射系统就是一个典型的多阶段多状态流量传输系统。传统的可靠性分析方法如故障树分析(FTA)等基于二元逻辑,只考虑正常和失效2 种状态,对于分析设备和系统的多状态情况具有局限性。文献[2]中研究表明,考虑设备部分失效后,应用传统的可靠性分析方法所得系统可靠性结果趋于保守。
发生函数法(UGF)可以对系统设备的多状态组合问题进行合理分析,能够较好地表示系统性能变化和多状态特点,是处理系统多状态可靠性问题的有效方法[3]。本文基于发生函数法对某船用堆安全注射系统进行多状态可靠性分析。
1 系统发生函数
发生函数方法(UGF)的主要思想是利用多项式表达设备或者系统的工作状态与该状态发生概率之间的对应关系,并且通过相关算子表示设备和系统间的性能结构关系。对于复杂的多状态系统,不同内部设备分布结构产生系统不同的性能结构,可以用系统性能结构函数Φ(G1(t),G2(t),…,Gn(t)表示,它构建了系统与各设备性能之间的关系,Gi(t)为设备的性能函数。对于多状态流量传输型系统,设备及系统性能通常以流体传输能力为度量指标。在流量传输型系统中若多个设备为串联逻辑关系,其系统性能结构函数可表示为

若为并联逻辑关系,系统的性能结构函数可表示为

系统运行时假定各设备瞬时状态概率相互独立,则系统发生函数式可由设备的发生函数经组合算子ΩΦ复合递归运算[3]得到

系统发生函数的系数在一定条件下取和,即通过δ 运算,可得到多状态系统在性能水平w 下的可靠度
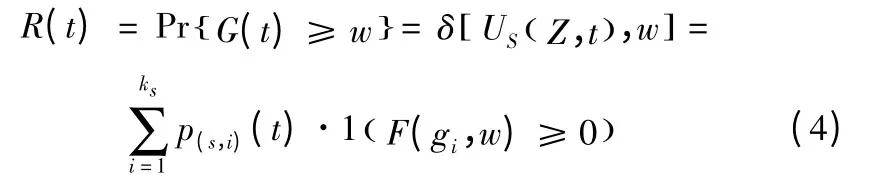
式中,1(F(gi,w)≥0)为示性函数,当gi≥w 时为1,否则为0。
2 船用堆安全注射系统功能结构分析
本文以某船用堆安全注射系统为研究对象,安全注射系统由安注水源、安全注射泵、换热器、反应堆舱喷淋装置以及相关阀门和管道等设备组成。图1 为某船用堆安全注射系统运行原理图。
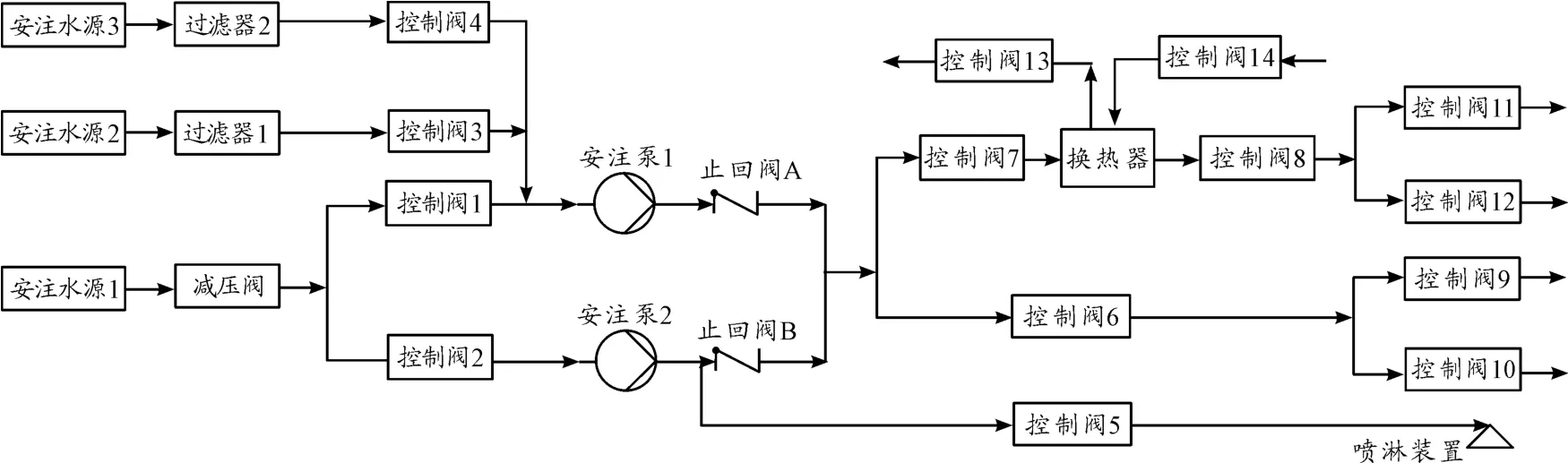
图1 安全注射系统运行原理
安全注射系统作为应急系统,其功能主要是当主系统发生失水事故时,启动安注泵从安注水源抽水注入反应堆冷却剂系统,实现安全注射,保障堆芯安全。同时该系统还承担再循环冷却和反应堆舱喷淋等功能并有明显的阶段性运行特点。系统的工作过程可以分为以下5 个阶段。
阶段1:一回路系统发生失水事故后,安全注射系统投入运行。开启控制阀1 和2,启动安全注射泵1 和2,开启控制阀6、9、10。系统由水源1 供水,两台安全注射泵同时抽水,经控制阀9 和阀10 向主回路注水。
阶段2:成功隔离破口环路,关闭靠近破口位置的控制阀9(或阀10),安注水由控制阀10(或阀9)注入反应堆;
阶段3:在阶段2 基础上开启控制阀门5,投入喷淋分系统。
阶段4:安注泵2 停止运行,关闭控制阀1、2 和阀5,开启控制阀3,安全注射泵1 从水源2 抽水注入反应堆。
阶段5:关闭控制阀3,开启控制阀4,安全注射泵1 从水源3 抽水。开启控制阀7、8、11 或12,关闭控制阀6,开启控制阀13 和14,换热器投入使用,系统转入再循环冷却阶段,循环冷却水经换热器冷却后由控制阀11 或12 注入主回路。
3 系统多状态可靠性分析
本文假定船用堆安全注射系统如果存在相关设备部分失效,工质传输流量降低,只要不低于系统额定流量的80%就还能继续工作,系统处于部分失效状态。如果工质传输流量低于额定流量的80%,则系统无法实现反应堆安全性要求的功能,处于完全失效状态。
船用堆安全注射系统功能结构复杂,涉及多种设备和串并联结构,运用发生函数法对其进行系统分析时,多状态的组合运算会非常繁杂。结合系统性能结构函数的递推性或互换性,可以采用模块化方法进行简化[4-5],按照设备-模块-系统的层次化关系对设备性能分布发生函数进行复合运算,运算过程中及时对同类项进行合并,最终获得系统的发生函数表达式。
通过油缸行程传感器得出截割头空间位姿,需要建立掘进机坐标系统,并通过D-H法解算才能得到截割头位姿检测模型。掘进机坐标系统及连杆参数如图2所示。
设备层次,这里假定安注水源正常供水,控制阀和换热器具有正常工作和故障失效2 种工作状态,性能值为1 和0。减压阀、过滤器、喷淋装置和安注泵、止回阀一样,因为部分失效具有3 种性能状态,性能值分别为1,0.8 和0。各设备失效数据[6]取值如表1 所示。
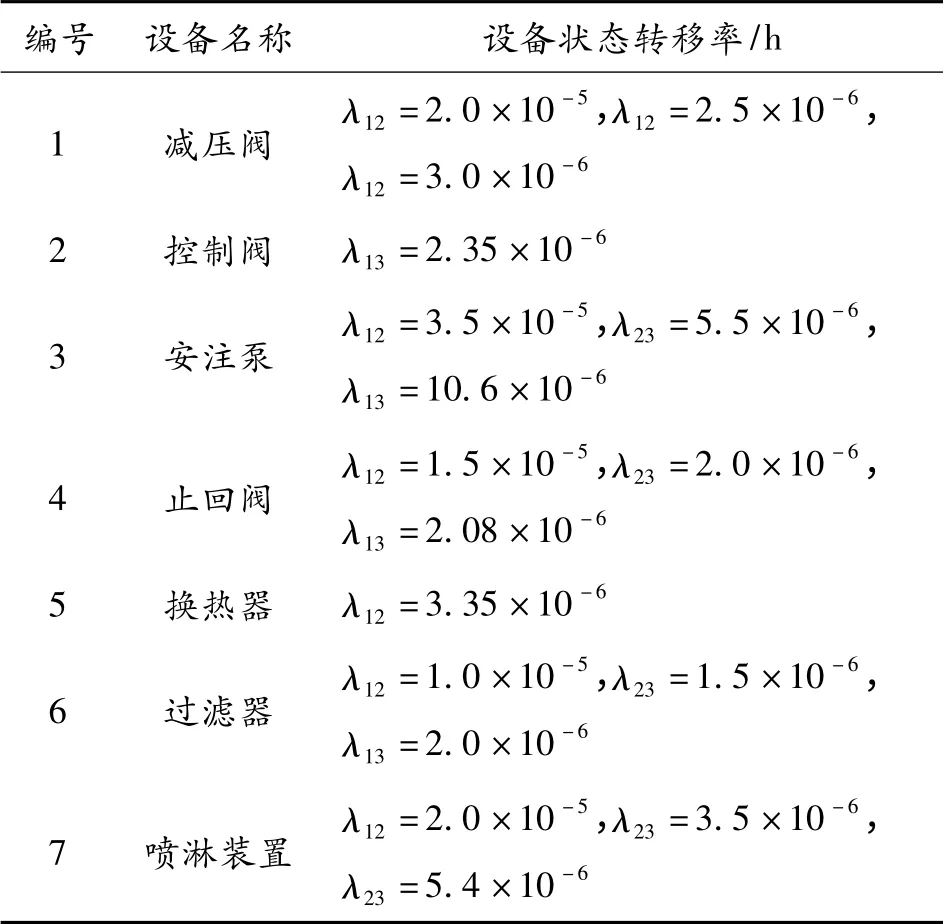
表1 安全注射系统各设备失效数据
3.1 单元模块多状态分析
多个设备组成单元模块时,运用发生函数会产生多状态组合问题,这里以安注泵和止回阀组成的串联单元模块为例,如图2 所示,求解单元模块的发生函数[7,8]。假定安注泵和止回阀都具有3 种功能状态:状态1,正常工作状态,对应性能值为1;状态2,部分失效状态,传输流量降为系统额定需求的80%,设备带故障运行,性能值为0.8;状态2,完全失效状态,对应性能值为0。
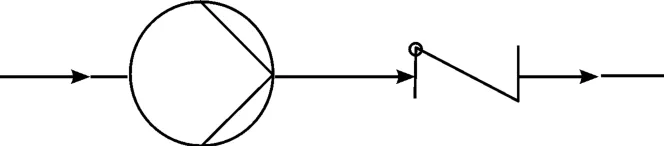
图2 安注泵和止回阀串联单元
对于存在部分失效的设备,不考虑维修性,其状态转移如图3 所示。
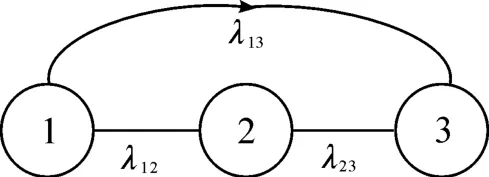
图3 多状态设备状态转移示意图
建立多状态设备的状态转移方程组如下:
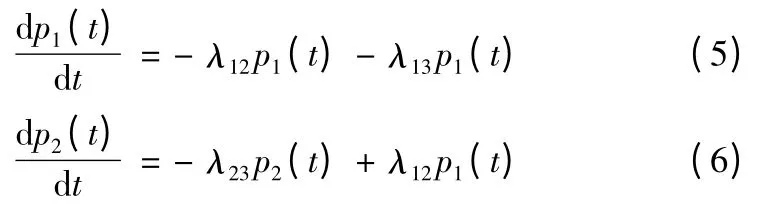

初始条件为:p1(0)=1,p2(0)=p3(0)=0。据此可求得设备处于不同状态的概率。由上一节可知单个设备的发生函数和串联单元模块的性能结构函数,再通过式(3)即可求得安注泵和止回阀串联单元模块的发生函数。
3.2 分阶段模块化处理
下面以船用堆安全注射系统运行阶段1 为例进行系统多状态可靠性分析。对该阶段系统的工作结构进行模块化处理,如图4 所示。4 个模块串联组成了系统运行阶段1 的工作结构。安注泵和止回阀一直处于工作状态,只要其中有设备出现故障系统就出现故障,所以模块2 和模块3 中内部为串联结构,而且两模块功能逻辑上为串联关系。模块4 中控制阀9 和控制阀10 处于备用关系再与控制阀6 串联。
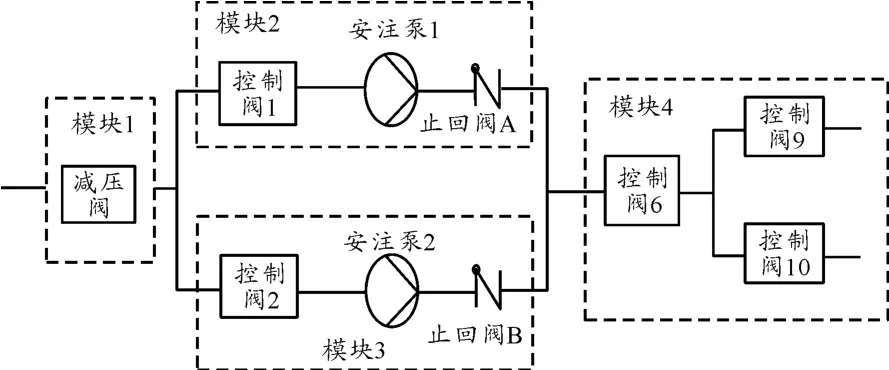
图4 安全注射运行阶段1 工作结构的模块化
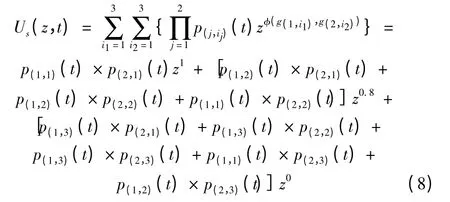
由单元模块发生函数计算方法和设备状态转移方程可以得到阶段1 中4 个模块的发生函数ux(z,t),以及各模块所处状态的概率p(x,ix)(t)。根据式(3)可知系统运行阶段1的发生函数为


对于系统其余的运行阶段,同样可以采用模块化处理方法,但是船用堆安全注射系统在不同运行阶段系统内部功能结构发生变化,模块划分和模块内部结构也有所不同。运行阶段2 因为要隔离破口,在阶段1 模块化基础上,模块4 变为由控制阀6 与控制阀9(或阀10)串联构成。运行阶段3在阶段2 基础上增加反应堆舱喷淋功能,因此需要再串联一个模块5,模块5 由控制阀5 和喷淋装置串联构成。运行阶段4 系统结构发生重大改变。系统由3 个模块串联组成。模块1 为过滤器1,模块2 由控制阀3 和安注泵1、止回阀A串联组成,模块3 由控制阀6 与控制阀9(或阀10)串联构成。运行阶段5 系统结构又发生明显改变,系统由3 模块串联组成。模块1 为过滤器2,模块2 由控制阀4、安注泵1、止回阀A 串联组成,模块3 中控制阀7、8、13、14、11(或12)与换热器构成串联逻辑关系。
3.3 计算结果分析
按照上文论述的分阶段多状态可靠性分析方法,可以分别得到船用堆安全注射系统所有运行阶段的系统发生函数和系统多状态可靠性的表达式。带入表1 的数据,计算得到船用堆安全注射系统运行失效概率和可靠度。
图5 为某船用堆安全注射系统投入时的系统运行失效概率。如图5 所示,系统运行在各阶段时失效概率发生阶跃性变化,这是因为各阶段系统工作结构和运行设备不同,特别是阶段3,阶段4 和阶段5 之间发生很大的变化,导致系统失效率显著的改变。
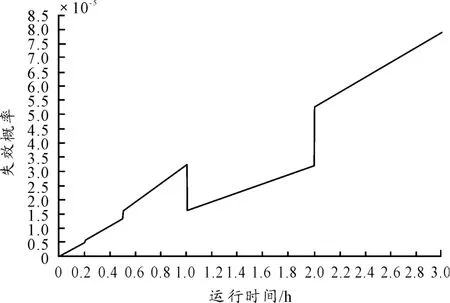
图5 安全注射系统运行失效概率
图6为船用堆长期运行(3 000 h)后,安全注射系统投入运行的可靠度。由图6 可知系统运行在各阶段的可靠度同样存在阶跃性变化,同时考虑部分失效后,系统投入运行的可靠度明显高于不考虑部分失效的系统可靠度。这是因为设备发生部分失效后带故障运行会使系统存在多状态情况,当设备工作性能降低但不低于实际需求时系统并未处于完全失效状态。在实际航行过程中,船用核动力装置为了完成任务、甚至为了自救,系统或设备处于降额运行状态的现象较为普遍,即系统处于部分失效状态的概率较高。实际工作中船用堆安全注射系统允许降额运行,所以经过较长时间后系统依然可以保持较高的可靠度。因此考虑部分失效的系统可靠性更符合实际。
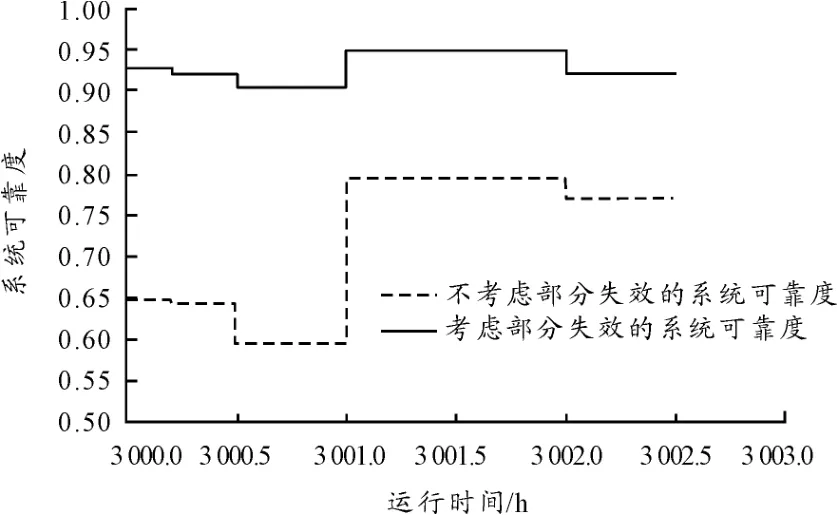
图6 船用堆长期运行后的安全注射系统可靠度
4 结论
1)基于发生函数法构建了考虑部分失效的多状态系统可靠性模型,适用于船用堆安全注射系统的多状态可靠性分析,为研究复杂多状态系统可靠性提供了可行的途径。
2)分阶段模块化处理可以有效简化系统发生函数的多状态组合问题。计算绘制的图形表明船用堆安全注射系统的失效概率和可靠度在运行过程中发生明显的阶跃性变化,较好地反映了该系统多阶段特点。
3)在考虑设备的部分失效后,按照本文分析方法,带入数据计算得到的系统运行可靠性明显高于不考虑部分失效的系统可靠性。可见船用堆在长期运行后,部分失效对系统可靠性的影响越来越来显著,设备和系统的部分失效状态不可忽略。
4)研究结果符合船用堆的实际工作情况,对多状态系统的分析方法可以运用到其他相关系统中,对于船用堆的安全运行和维修保障具有参考价值。
[1]陈玲,蔡琦,蔡章生.基于部分失效的NPP 典型系统技术状态评估[J]. 系统工程理论与实践,2006(9):141-144.
[2]Ni T. Development of Fuzzy Logic Modeling Method in Probabilistic Risk Assessment[D]. Maryland:University of Maryland,1997.
[3]Lisnianski A,Levitin G. Multi-state system reliability:assessment,optimization and application[M]. Singapore:World Scientific Publishing Co.Pte.Ltd,2003.
[4]Ramirez Marqueza J,Levitinb G.Algorithm for Estimating Reliability Confidence Bounds of Multi-State Systems[J].Reliability Engineering and System Safety,2008(93):1231-1243.
[5]周金宇.系统非整数阶可靠性分析[D]. 沈阳:东北大学,2005.
[6]阎凤文.设备故障和人误数据分析评价方法[M].北京:原子能出版社,1988.
[7]朱康,赵新文.基于发生函数法的反应堆净化系统多状态可靠性分析[J]. 原子能科学技术,2013(6):952-957.
[8]尚彦龙,蔡琦,赵新文,等.基于UGF 和Semi-Markov 方法的反应堆泵机组多状态可靠性分析[J].核动力工程,2012(2):117-122.
猜你喜欢
化工设计通讯(2021年9期)2021-01-08
应用能源技术(2020年9期)2020-12-14
水上消防(2020年2期)2020-07-24
水上消防(2019年3期)2019-08-20
作文周刊·小学一年级版(2016年11期)2016-05-10
探测与控制学报(2015年4期)2015-12-15
中国水运(2015年11期)2015-12-08
汽车电器(2014年5期)2014-02-28
中学科技(2009年6期)2009-07-30
