用于城市轨道交通车辆永磁同步电机控制的一种新型滑模观测器
2015-06-29 02:35余朝刚苏鹏云
城市轨道交通研究 2015年9期
韩 清 余朝刚 苏鹏云
(上海工程技术大学城市轨道交通学院,201600,上海∥第一作者,硕士研究生)
国外轨道交通车辆的主要供应商已经研制出用于轨道车辆的永磁同步电机,并改进了转向架,缩短了轴距,提高了牵引性能[1]。城市轨道交通车辆客流量大、行车密度大的特点要求永磁同步电机体积小、重量轻、效率高[2-3],这严格限制了车体下永磁电机的重量和尺寸[3]。采用软件算法代替位置传感器的无传感器技术可以明显缩小永磁电机的重量和体积,已经成为城市轨道交通车辆永磁同步电机的重要研究领域[2]。滑模观测器(是一种控制算法)由于具有对系统数学模型精度要求不高,对参数扰动具有鲁棒性的特点,在无传感器技术领域得到了广泛应用[4-6],但传统滑模观测器使用一个或几个低通滤波器[6]提取高频抖振信号中的反电动势信号,通常导致相位延迟,因此不能满足高精度要求。文献[6]采用分段补偿位置估算误差的方法,这种方法的实用性不强,不适合大范围应用。文献[7]提出了一种非奇异高阶终端滑模观测器,有着较高的估算精度,但并未进行试验分析。本文为了实现城市轨道交通车辆永磁同步电机无传感器控制,基于文献[4-8]提出采用一种新型滑模观测器用来估算转子信息。
1 城市轨道交通车辆永磁同步电机数学模型
城市轨道交通车辆一般采用表面式永磁同步电机,在α-β坐标系下城市轨道交通车辆用永磁同步电机数学模型可以表示为[8]:
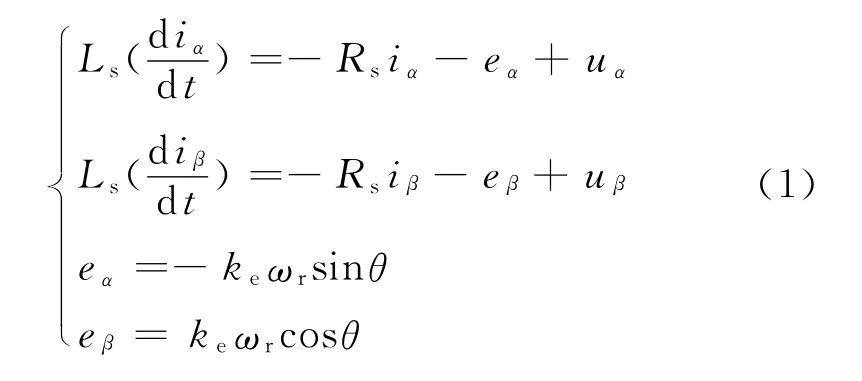
式中:
iα——α-β坐标系下α轴电流;
iβ——d-β坐标系下β轴电流;
eα——α-β坐标系下α轴反电动势;
eβ——d-β坐标系下β轴反电动势;
Ls——相电感;
Rs——相电阻;
ke——反电动势系数;
t——转动时间;
uα——α-β坐标系下的α轴电压;
uβ——α-β坐标系下的β轴电压;
θ——电机转子的转角;
ωr——电机转子转速。
与电机定子电流的变化速率相比,转速的变化速率非常小可以认为等于0[8],则式(1)变换如下:

由式(2)可以看出,永磁同步电机转子位置信息只与反电动势有关。反电动势为一正弦波,其幅值与转子转速成正比,反电动势信号中包含转子的位置和速度信息[8]。
2 新型滑模观测器设计
本文在引入反电动势观测器的基础上,将反电动势估算值反馈到电流观测器,并且采用Sigmoid函数代替开关函数,以及用指数趋近律代替传统等速趋近律的方法,进一步改进传统观测器。
新型滑模观测器可表示为:

式中:
——iα的估算值;
——iβ的估算值;
l——控制函数的反馈增益系数;
Zeα,Zeβ——新型滑模观测器的估算反电动势;
Zα,Zβ——代替传统滑模观测器开关函数的Sigmoid函数。
新型滑模观测器结构如图1所示。

图1 新型滑模观测器结构图
选取Lyapunov函数,证明所设计滑模面的稳定性,只要选择合适的控制函数增益就可以保证滑模面的存在以及滑模观测器可以收敛到实际值。当估算误差到达滑模面后,为了保证滑模面趋近的同时进一步削弱抖振,采用指数趋近律Sα、Sβ[9]代替传统等速趋近律,则可以得到反电动势的初步观测值为:

式中,μ为远大于0的正常数。
从式(5)可知,l的取值在很大程度上影响反电动势的估计值,l一般取5~10。反电动势初步观测信号通过低通滤波器滤除高频扰动信号,采用反电动势观测器消除引入低通滤波器带来的相位滞后。根据渐近观测器理论,由式(2)可以建立如式(5)所示的反电动势观测器[8]:
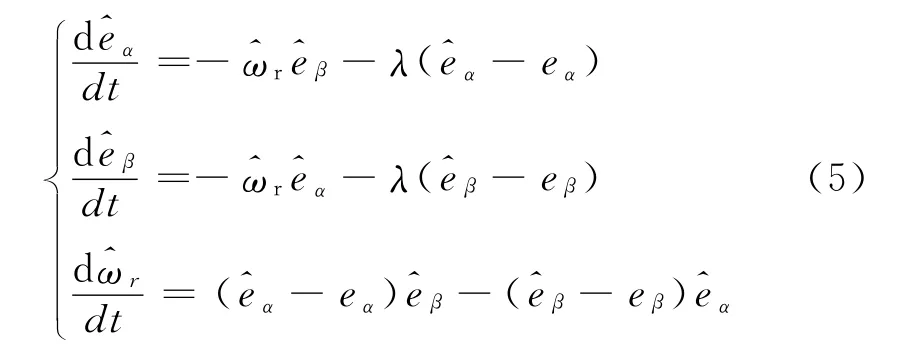
式中,“^”表示估算值,λ为正常数。
将式(5)与式(2)相减,可以推得:

一般情况下λ的取值为150 左右。上述反电动势观测器式(5)可以估算出正确的反电动势值以及转子速度。转子的转角可以由估算的反电动势值得到,转子的转角估计公式为:

3 仿真结果
为了验证新型滑模观测器对城市轨道交通车辆永磁同步电机转子信息的估算能力,在下列条件下进行仿真:给定ωr=200 r/min,负载转矩为30 N·m。并对改进前后的滑模观测器仿真结果进行比较,以验证新型滑模观测器对电机转子位置的动态跟踪性能。图2为传统和新型滑模观测器估算反电动势的对比。
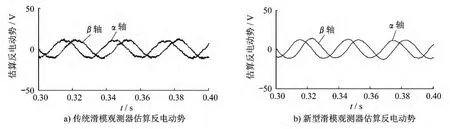
图2 传统滑模观测器和新型滑模观测器估算反电动势的对比
由图2可知,采用传统滑模观测器估算的反电动势中谐波量大,抖振严重;新型滑模观测器估算的反电动势波形趋于平滑,抖振得到了很好的抑制。因此,新型滑模观测器可以很好地抑制抖振带来的负面影响。图3为传统和新型滑模观测器估算转子角度对比。
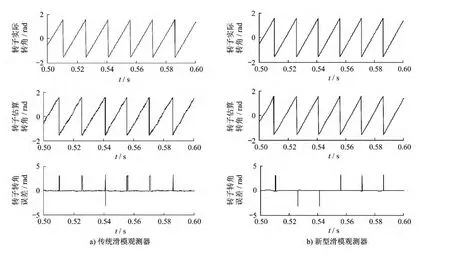
图3 传统滑模观测器和新型滑模观测器估算转子角度的对比
由图3可知,传统滑模观测器虽采用了相位补偿环节,但仍有相位滞后,存在严重的高频抖振;新型滑模观测器相位滞后明显减少,高频抖振得到了很大程度抑制。其中,新型滑模观测器的转子转角估算在π/2到-π/2切换时的误差是由于相位滞后并没有得到完全消除,估算转角与实际测量转角仍存在非常小的误差而造成的。与传统滑模观测器相比,新型滑模观测器基本消除了相位滞后,避免了采用相位补偿环节带来的误差,可更好地削弱传统滑模观测器存在的抖振。图4为传统和新型滑模观测器估算转速对比。
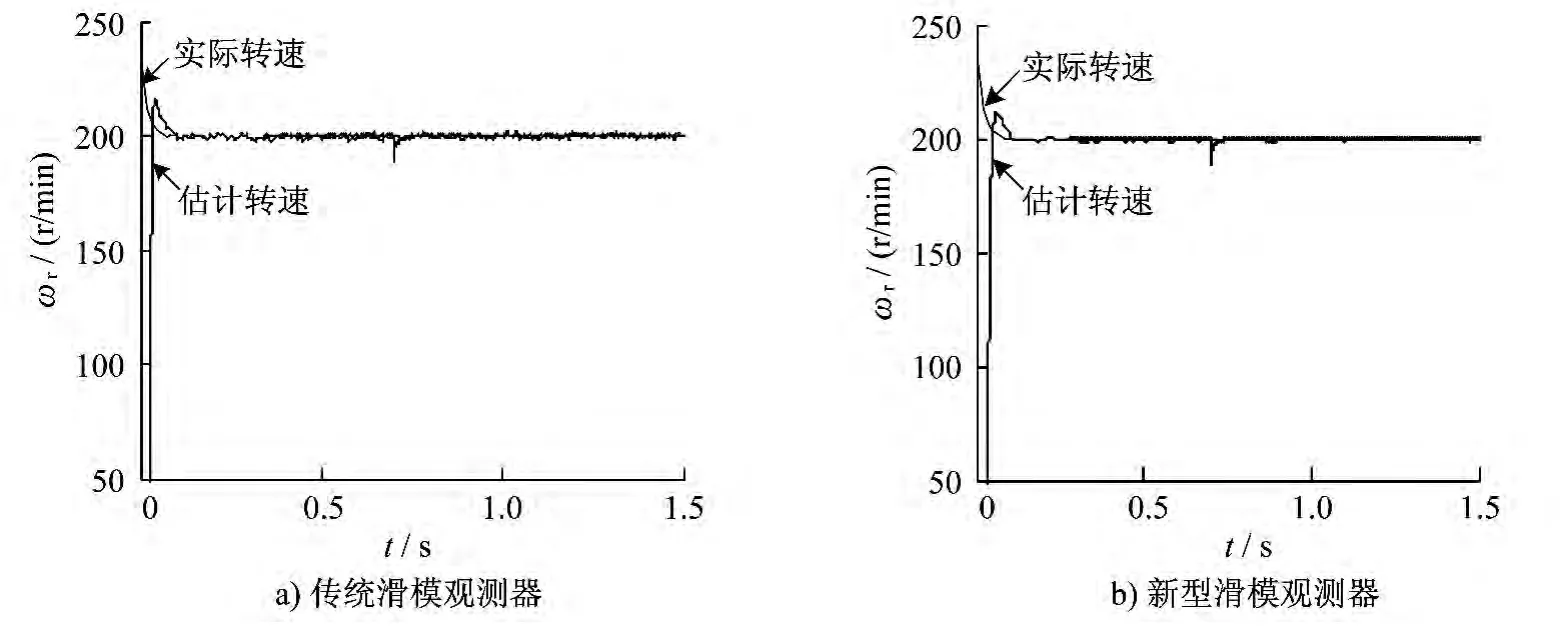
图4 传统滑模观测器和新型滑模观测器估算转速对比
由图4可知,0.7 s时负载转矩由30 N·m 突变为45 N·m,由于负载扰动发生在0.7 s,此时实测转速突然下降,但在很短时间内纠正到给定转速,而估算转速基本不受负载扰动影响,可以看出新型滑模观测器具有很好的鲁棒性。采用传统滑模观测器估算转速仍存在严重抖振,新型滑模观测器可以更好地抑制抖振。
为验证新型滑模观测器对扰动的鲁棒性,使初始给定转速200 r/min在0.2 s时突变为100 r/min,使初始负载转矩30 N·m 在0.5 s时突变为45 N·m。新型滑模观测器在负载扰动和转速扰动时的估算反电动势、转子转角、转子转速如图5所示。
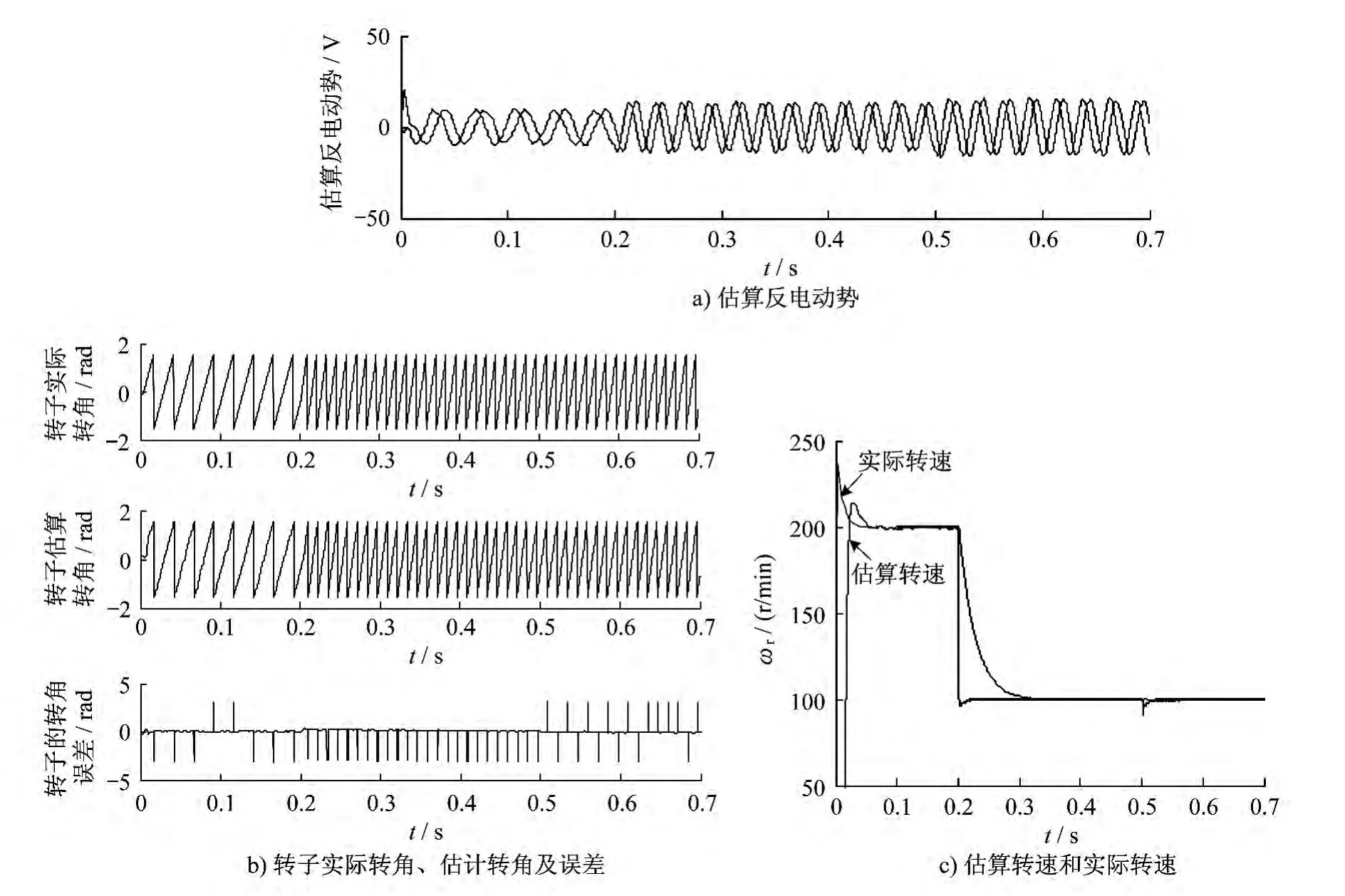
图5 新型滑模观测器在负载扰动和转速扰动时的估算反电动势、转子转角和转子转速
从图5可以看出,在0.2 s转速变化和在0.5 s负载扰动时估算角度会出现小幅抖振,但在很短时间内就可以得到正确的估算反电动势和估算角度。在电机刚启动和转速突变时,估算转子转速存在一定的误差,但在很短时间内便可得到正确的估算角度,而当负载扰动时估算转子转速几乎没有发生变化。因此,新型滑模观测器可以准确地估计出电机的转子位置信息,并具有很强的鲁棒性,其具有一定的工程应用价值。
4 试验分析
为了进一步验证新型滑模观测器对于城市轨道交通车辆永磁同步电机转子位置动态跟踪性能,搭建了基于TMS320F2812 试验平台,将光电码盘得到的转子位置实际值和新型滑模观测器的估算值相比较,验证算法的正确性和有效性。在给定ωr=500 r/min时进行试验,试验结果的对比波形如图6所示。

图6 转子转角与转速的试验结果比较
由图6可以看出:新型滑模观测器可以正确地估算出转子的位置信息,高频抖振得到明显抑制,相位滞后也得到了很好地补偿。但仍显不足的是,转子角度估算存在少量抖振及相位滞后,在电机启动阶段,转速估算仍滞后于实际测量值,因此在以后的研究中将进一步改进算法。试验结果表明,电机动态性能良好,转子位置信息估算正确,故新型滑模观测器算法具有切实可行性和实际有效性。
5 结语
本文使用了一种城市轨道车辆永磁同步电机新型滑模观测器,并证明了其稳定性,根据反电动势模型建立了反电动势观测器,避免了传统滑模观测器使用低通滤波器带来的相位延迟和角度补偿等问题。仿真和试验结果表明,新型滑模观测器能够很好地跟踪电机转子信息,达到了城市轨道交通车辆永磁同步电机无传感器控制要求,对于城市轨道交通车辆电气传统系统的改进具有一定的现实意义。
[1]王曰凡.永磁同步传动的城市轨道交通新型车辆[J].城市轨道交通研究,2011(6):2.
[2]盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010(9):74.
[3]徐英雷,李群湛,许峻峰.城市轨道交通车辆永磁同步电机牵引系统研究现状与发展前景[J].电机与控制应用,2009(5):7.
[4]尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007(3):23.
[5]Kim H,Son J,Lee J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].Industrial Electronics,IEEE Transactions on,2011(9):4069.
[6]丁文,梁得亮,罗战强.两极滤波滑模观测器的永磁同步电机无传感控制[J].电机与控制学报,2012(16):1.
[7]郑学梅,李秋明,史宏宇,等.用于永磁同步电机的一种非奇异终端滑模观测器[J].控制理论与应用,2011(10):1467.
[8]刘金琨.滑模变结构控制 MATLAB 仿真[M].北京:清华大学出版社,2005.
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
北京航空航天大学学报(2017年6期)2017-11-23
科教导刊·电子版(2017年16期)2017-07-21