
电动汽车车载充电系统集成设计及模糊控制
2015-06-27 09:05邓元望
电源技术 2015年8期
邓元望,文 滨,周 帅,尹 亮
(湖南大学机械与运载工程学院,湖南长沙410082)
电动汽车车载充电系统集成设计及模糊控制
邓元望,文 滨,周 帅,尹 亮
(湖南大学机械与运载工程学院,湖南长沙410082)
为了满足车载充电系统小型、快速、智能化的要求,用Matlab模糊控制工具箱设计了基于模糊逻辑的电动汽车车载充电系统,提出了一种带模糊控制的脉冲充电法,电流可以很好地逼近蓄电池可接受充电电流曲线,减弱了蓄电池充电极化的影响。主电路采用隔离型DC/DC全桥高频变换器,减少了车载充电系统的体积;控制部分采用双输入单输出的模糊控制器,在充电过程中实时动态跟踪蓄电池可接受充电电流曲线,有效防止蓄电池过充和过热等问题,极大地提高充电效率。仿真结果表明,所设计的电动汽车车载充电系统能对整个充电过程进行最优控制,充电快速、效率高,完全满足充电系统的性能要求。
电动汽车;车载充电系统;模糊控制;脉冲充电
电动汽车车载充电系统设计是电动汽车大规模商业化后不可缺少的组成部分,如何实现对车用蓄电池快速智能无损充电是电动汽车投入市场前必须解决的关键技术之一[1-2]。传统充电技术没有采取动态跟踪电池的实际可接受充电电流,造成欠充、过充等问题,对蓄电池寿命影响很大。同时由于蓄电池的充电过程是一个十分复杂的电化学反应过程,因此,对于这样一个多变量、非线性、强耦合的控制对象,很难从它的数学模型出发,设计一个稳态和动态性能合乎要求的控制器[3-4]。
本文采用模糊控制技术,抛开对电池模型的具体研究,通过对电池充电过程的电压、电流、温度反馈值来判断蓄电池最大可接受充电电流的大小,并运用脉冲充电法[5-7],实现高效智能无损的充电。
1 车载充电系统集成总体机构设计

图1 车载充电系统总体结构
根据电动汽车电能供给的典型方式以及充电系统的要求,本文设计的车载充电系统总体结构如图1所示。主电路采用交流-直流-交流-直流的设计结构,首先220 V交流电经过输入整流滤波模块后变为380 V的直流电,然后经过DC/DC全桥变换器得到交流的方波电压,最后通过变压器变比以及输出整流滤波模块得到满足蓄电池充电要求的直流电。控制部分通过对蓄电池端电压、电流信号的采集,由模糊控制器输出下一时刻最大允许充电电流,将此值传送给DSP控制器,由DSP控制PWM波的占空比来调节下一脉冲值的大小。考虑到车载充电系统的安全性,整个控制部分还包括了对电流、电压、温度的实时显示。
2 车载充电系统主电路设计
DC/DC变换部分是车载充电系统主电路的关键部分,同时也是难点所在。整机充电性能的好坏很大程度上取决于该变换部分。该部分如图2所示,主要包括变换器拓扑结构的选择、功率管的选择、高频变压器的设计以及整流滤波回路的设计。
(1)逆变电路拓扑结构的选择
开关电源的主要拓扑结构有正激、反激、全桥、半桥、推挽五种拓扑结构。其中正激、反激、推挽适应于各种中、小功率电源;而半桥虽可以应用于大功率电源,但相对于全桥变换效率较低;全桥变换电路容易实现零电压移相控制,是目前应用最广的软开关电路,仅仅增加几个谐振器件,就能使电路中的开关管在零电压的条件下开通关断。
(2)功率管的选择
目前智能充电系统中基本都选择IGBT管作为开关元件,因此,根据本文所设计的车载充电系统的要求,选择IGBT管作为开关器件构成系统的逆变电路,实现对智能快速充电的控制。经过对目前市场上主要使用的几款IGBT参数的综合分析,选择三菱公司的CT60AM-20快速型IGBT模块,它非常适合高速开关电路,耐高压1 000 V,允许最大电流60 A。
(3)高频变压器的设计
变压器作为开关电源不可缺少的磁性元件,对整个车载充电系统的正常工作有很重要的影响。本文设计的变压器输入原边电压Uin为240 V,输出副边电压Uout为168 V。具体计算如下:
初级绕组匝数:

式中:D为变压器最大占空比;fs为开关频率;N1为初级绕组匝数;Bm为磁芯工作磁感应强度;Ae为磁芯有效截面积。在实际选择中确定初级绕组匝数为8匝。
次级绕组匝数:

式中:n为初级绕组与次级绕组的匝数比;N2为次级绕组匝数,实际设计中选取6匝。
3 充电方法选择
传统的恒流、恒压充电技术无法动态跟踪电池的实际可接受充电电流的大小,难以满足车载蓄电池组的充电要求。本文选择快速脉冲充电法,如图3所示,它可以使电池充电电流始终处于电池可接受最大充电电流值附近,使电池几乎在无气体析出的条件下充电延长电池使用寿命。目前,脉冲式快速充电方法已经得到了广泛的应用。

图3 脉冲式充电曲线
脉冲充电法的原理是利用电池暂停充电的休息时间使电解液进行平衡,以增加反应的完整性。脉冲充电法在充电期间的一段停止充电时间内,电池内的电解液可以获得均匀的扩散,电池得到的电能充分转化为化学能,而不是大部分以热能的形式散发出去,故其充电效率比传统的充电方法更高。带有放电脉冲的充电法,在停充期间进行一次放电脉冲可以消除极板的气泡,降低内阻,提高电能转化为化学能的效率。
4 充电模糊控制器的设计
模糊控制器是智能车载充电系统的控制核心,而模糊控制规则表的制定又是整个模糊控制器的核心。一般来说,每个模糊控制器有3个主要的功能模块:模糊化模块、清晰化模块(反模糊化模块)、模糊推理模块。针对本文的车载蓄电池参数,设计的充电模糊控制器结构如图4所示。

图4 充电模糊控制器结构
4.1 模糊输入和输出量的选取
锂离子电池组中的单个电池由于使用条件的不同会存在个体差异,但是单个电池在充电过程中电压的上升快慢趋势是相差不大的,同时当电池电压越接近最大额定电压时,电池的温度上升速度越快,这样对电池的伤害也非常大。因此如果使电池电流按照最大可接受充电电流特性曲线变化,那么充电就可以达到最佳,最大程度地减少对电池的伤害,同时缩短充电时间。根据这一特点,设定模糊控制器的输入分别为连续两次电压检测值的变化率du/dt和电池理想的最高额定电压与测量得到实际电压值之差dv,而输出值为脉冲充电电流的变化量di。
4.2 模糊语言变量及隶属函数的选取
因为在充电时蓄电池电压随着充电的进行呈逐渐上升的趋势,所以蓄电池实测电压值与电池理想的最高额定电压之差dv的模糊语言变量选为dv={ZE(零),PS(正小),PM(正中),PB(正大),PVB(正非常大)}。根据锂离子电池充电曲线和本文车载蓄电池组参数技术资料,充足电时单个电压一般在3.9~4.2 V,锂离子电池放电后电压到2.5 V左右时,认为电池已经放完电,而需要进行充电。因此确定dv基本论域为[0,60]。量化论域选择(0,1,2,3,4,5,6),量化因子Kdv=7/60。
同样,根据锂电池组充电电压的变化情况,分析它的最大变化率为6.09×10-4V/s,因此电压变化率du/dt的基本论域为[0,6.09],它的模糊语言变量选为{ZE(零),PS(正小),PM(正中),PB(正大)}。量化论域也选择为(0,1,2,3,4,5,6),量化因子Kdu/dt=7/6.09。
输出电流变化量基本论域定为[0.01C,0.1C](C为蓄电池额定容量),量化论域选择(-3,-2,-1,0,1,2,3),输出电流变化量的语言变量选择di={NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中),PB(正大)},比例因子Kdi=7/0.09C。在这里选择输入、输出都采用三角形隶属函数trimf:

式中:a、c分别为对应三角形下部左右的两个顶点,b为对应三角形上部的顶点。
其隶属函数图形如图5所示。

图5 隶属函数
语言变量赋值分别如表1、表2、表3所示。
4.3 反模糊化及模糊控制查询表的建立
通过对锂离子蓄电池充电曲线的分析可知,当电压测量值与理想电压最大值相差较大时,蓄电池电压上升不大,因此可以制定规则为:当两者差值较大时,可以适当增大充电电流;两者差值较小时,应适当减少充电电流。如果电压变化率过大,表明蓄电池析气量增大,就应该减少充电电流。采用重心法进行反模糊化:

表1d/d的语言变量赋值变量0 1 2 3 4 5 6 P S 0 0 . 3 0 . 7 1 0 . 3 0 0 P B 0 0 0 0 0 0 . 3 1 Z E 1 0 . 7 0 . 3 0 0 0 0 P M 0 0 0 0 0 . 7 0 . 7 0

变量 0 1 2 3 4 5 6表2d的语言变量赋值P S 0 0 . 2 0 . 8 0 0 0 0 Z E 1 0 . 8 0 0 0 0 0 P M 0 0 0 . 2 1 0 . 2 0 0 P B 0 0 0 0 0 . 8 0 . 8 0 P V B 0 0 0 0 0 0 . 2 1

表3d的语言变量赋值变量 -3 -2 -1 0 1 2 3 N M 0 . 8 1 0 . 7 0 .3 0 0 0 P M 0 0 0 0 0 . 7 1 0 . 7 N B 1 0 . 7 0 . 3 0 0 0 0 N S 0 . 2 0 . 6 1 0 .7 0 . 2 0 0 Z E 0 0 0 . 5 1 0 . 5 0 0 P S 0 0 0 0 .5 1 0 . 7 0 . 3 P B 0 0 0 0 0 . 3 0 . 8 1

得到的充电模糊控制查询表如表4所示。只需将模糊控制规则固化到程序存储器里,通过DSP查表的方法,在充电过程中进行微调,即可控制充电脉冲电流值的大小。

表4 充电模糊控制查询
5 车载充电系统的建模与仿真
使用Matlab/Simulink软件对整个充电过程建立了系统仿真模型,并对结果进行分析。
5.1 主电路仿真模型的建立
根据前文对车载充电系统的主电路设计,具体仿真参数如下:输入电压为220 V交流单相市电;电池模型采用Matlab自带模型,选择锂离子电池,额定电压48 V、容量10 Ah;开关器件频率80 kHz;交流侧、直流侧电感都为1 mH。整个主电路仿真模型如图6所示。
5.2 模糊控制仿真模型
利用Matlab/Simulink仿真软件中的Fuzzy Logic Toolbox模糊控制模块,建立模糊控制仿真模型如图7所示。
5.3 仿真结果波形分析
图8为前级整流输出电压波形图,由图8可以看出此电压波形脉动值非常小,在整个充电过程中电压可以保持在380 V左右。

图6 主电路仿真模型
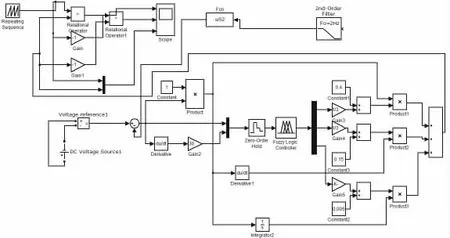
图7 模糊控制仿真模型

图8 前级整流输出电压波形
图9为变压器原变电压波形图,也就是经逆变器逆变后的交流方波电压,此波形与前文变压器实际设计的波形相当吻合。
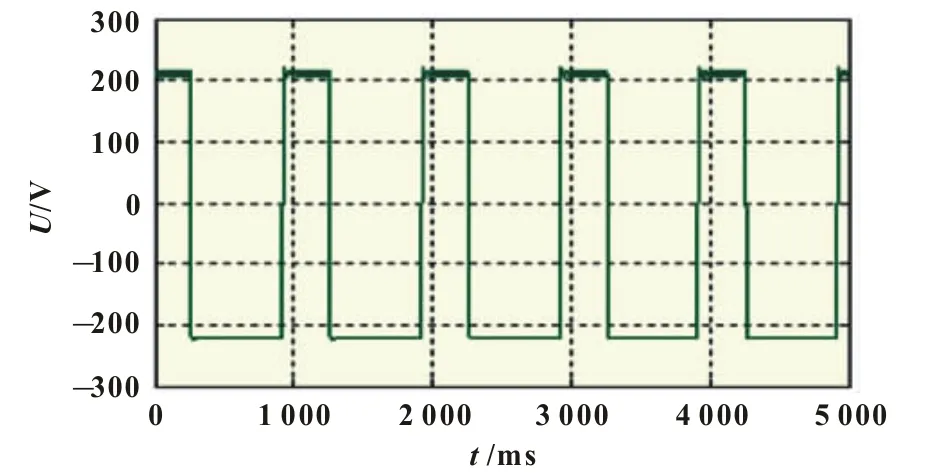
图9 变压器原变电压波形
图10和图11为4个IGBT管的驱动脉冲波形图,仿真采取的是PWM双极性控制方式,四个开关管中前桥臂Q1与Q3为互补导通,后桥臂Q2和Q4也为互补导通,斜对角开关管同时导通与关断。

图10 Q1和Q3管驱动脉冲

图11 Q2和Q4管驱动脉冲
图12和图13分别为蓄电池充电电流和电压波形。充电电流为脉冲电流,随着充电的进行,脉冲电流值有所减少,可以很好地与蓄电池最大可接受充电电流曲线相吻合。充电电压维持在50 V且纹波很小,可以很好地满足蓄电池的充电要求。

图12 蓄电池充电电流波形

图13 蓄电池充电电压波形
6 结论
(1)根据蓄电池充电特性,本文采用基于模糊控制的脉冲式充电法,抛开了对蓄电池具体数学模型的分析,在该充电模式下,充电电流可以根据蓄电池的充电状态实时调整,实现智能化、快速化充电。
(2)根据系统主电路和控制电路的设计,以48 V/10 Ah锂电池为充电对象搭建仿真模型,仿真结果表明设计的车载充电系统是合理可行的。
[1]胡骅,宋慧.电动汽车[M].北京:人民交通出版社,2003.
[2]聂昕,毛永志.电动汽车的关键技术及发展[J].新材料产业, 2006(10):37-42.
[3]NING L.An economical single stage battery charger with power factor correction[J].IEEE,2003(2):760-763.
[4]高田,景占荣,王琪.蓄电池快速充电模糊控制技术的研究[J].计算机仿真,2006(10):58-6l.
[5]杜娟娟,裴云庆,王兆安.电动车铅酸蓄电池的脉冲快速充电设计[J].电源技术应用,2005,8(3):28-31.
[6]CHIU H J.A rapid charger of lead-acid batteries with energy recovery[J].IEEE,2003(2):756-759.
[7]汪根华.大功率智能型充电机的研究与应用[D].郑州:河南大学,2004.
Integration design and fuzzy control of vehicular charging system for electric vehicle
DENG Yuan-wang,WEN Bin,ZHOU Shuai,YIN Liang
(College of Mechanical and Vehicle Engineering,Hunan University,Changsha Hunan 410082,China)
In order to meet the small,fast,intelligent requirements for vehicle charging system,the charging system of electric vehicle based on fuzzy logic was designed by using Matlab fuzzy control toolbox.A pulse charging method with fuzzy control was put forward,the current can well approach acceptable charging current curve,weakening the influence of battery charging polarization.The isolated DC/DC full bridge high-frequency converter was adopted in main circuit, reducing the charging system volume; the fuzzy controller with double inputs and one output was adopted in control part,so that the acceptable charging current curve could be real-time and dynamically tracked during the charging, effectively preventing the overcharging and overheating and greatly improving the charging efficiency.The simulation results show that designed electric vehicle charging system with fast charging and high efficiency can realize the optimal control for the whole charging process,fully meeting the performance requirements for the charging system.
electric vehicle;vehicular charging system;fuzzy control;pulse charging
TM 912
A
1002-087 X(2015)08-1722-04
2015-01-15
邓元望(1968—),男,湖南省人,工学博士,主要研究方向为电动汽车充电系统。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
中国新通信(2020年1期)2020-05-25
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
中国公共安全(2017年11期)2017-02-06
电脑知识与技术(2016年24期)2016-11-14
广西电力(2016年5期)2016-07-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
