
总线式船用应急车钟设计
2015-06-27 05:45刘冬森
船电技术 2015年6期
刘冬森
(安徽省阜阳市地方海事局,安徽 阜阳 236000 )
总线式船用应急车钟设计
刘冬森
(安徽省阜阳市地方海事局,安徽 阜阳 236000 )
船用电子应急车钟是船上驾驶室主控车令控制器的备份控制设备。在应急情况下,通过相应按钮或选择开关操作向“机舱”和“集控室”发送用车指令,保证船舶正常行驶。应急车钟由发送器,复示器和接收器三部分组成。具有驾驶室、集控室和机舱三地传递显示车钟命令、报警等功能。系统以单片机为控制核心,发送器、复示器和接收器间采用CAN总线通讯,具有配置灵活和比老式车钟的电缆芯线少、节约造船费用等优点。
应急车钟 单片机 CAN总线
0 引言
当前制造的船舶设备大都采用了自动化的控制手段。计算机技术的飞速发展及广泛应用,为船舶自动化开辟了更广泛的发展领域,采用微机控制的系统成为一种必然的发展趋势。船用车钟作为船舶操纵信号设备,是船舶主机遥控系统的主要组成部分,是现代化船舶机舱必不可少的设备之一,应急车钟是船舶主车钟的冗余设备,用于船舶驾驶室、集控室、机舱三地间的通信和联系。当船舶遇到特殊紧急情况,如主控车令控制器损坏或失灵等情况,就得启动应急车令的通信,以实现由“驾驶控制室”向“机舱”和“集控室”等多个控制部位的相互间通信,使船舶免于失控,能正常安全行驶。
1 系统的总体设计
1.1 系统的总体机构
系统由驾驶台发送器,集控室以及机舱的复示器、接收器三个独立的单元组成,在集控室操作面板上转换开关进行复示器与接收器的切换,各个单元都由单片机控制,由单片机内嵌的CAN控制器(MultiCAN)通过CAN总线相连,同时驾驶室的发送器通过RS485总线连接着VDR(航行参数记录仪),各单元再分别由24 V电源供电。
系统的基本框图如图1所示。
1.2 系统的主要功能
系统设计有正车全速、正车半速、正车慢速、正车微速、停车、备车、完车、倒车微速、倒车慢速、倒车半速、倒车全速11个档位来指示主机的转速和转向。通过车钟系统各单元面板上的各种按键,依靠声、光信号来进行船舶航行工况指令或部位转换指令的传递和应答。车令从一个车钟发送器(当前发令单元)传送到所选定的车钟接收器(接收单元) 在车钟发送器上操作某一欲发指令的相应按键时,车钟系统中所有单元面板上的对应指示灯闪光,被取代的指示灯熄灭,并在所选定的车钟接收器和发令器上发出声响信号。应答信号只能在被选定的接收单元上进行。应答的方法是按压所选定的接收单元面板上的闪亮指示灯所对应的按键。应答后,所有车钟面板上的闪亮指示灯变为常亮,所选定的车钟接收器和发令器上的声响消失,表明发送的指令已被接收。
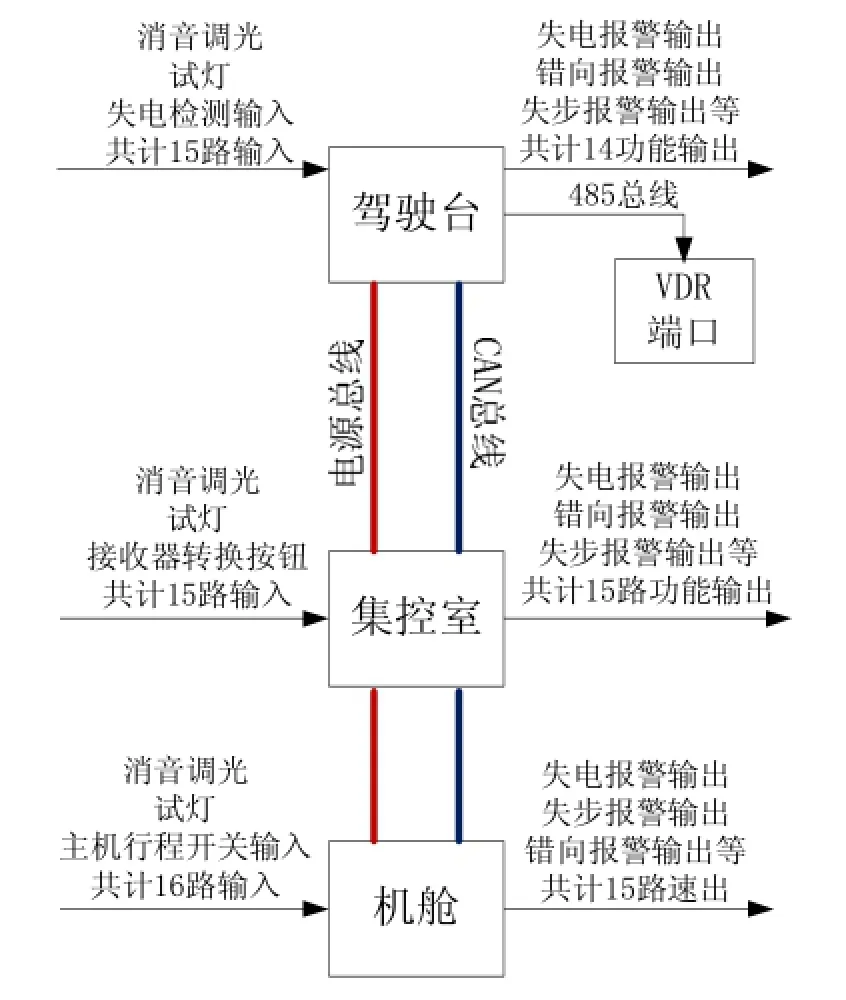
图1 系统总体结构
车钟系统各单元均设有试灯和调光功能。通过按压各单元面板上的“试灯”按键,则该单元面板上的所有指示灯均被点亮。“试灯”按键松开后,则该单元面板上的所有指示灯将恢复原状。按下各单元面板上的“调光+”或“调光-”按键,则可以对该单元面板上的所有指示灯的亮度进行渐亮或渐暗的调节。
应急车钟电源由两路供电提供,一路是由AC220 V经电源转换器转换成DC24 V,此为主电源,另一路为DC24 V的备用电源。当由AC220 V变换成的DC24 V主电源失电时,自动转换到另一路(蓄电池DC24 V)电源,并有声光报警和24 V有源触点输出。主电源恢复正常后,自动撤消报警。
失步报警为按下发送接收器按键时,此时处于失步状态,例如按下应急车钟操作面板的“正车全速”按键,此时发令车位“正车全速”指示灯闪烁,而回令指示灯仍停留在“停车”位置,失步报警蜂鸣器将会发出报警。
错向报警即为车令处于正车方向时,将主机操向倒车方向;或者是在车令处于倒车方向时,将主机操向正车方向,这两种情况都将产生错向报警。
驾驶室发送器通过RS485总线连接VDR,能够实时对车钟车令信息进行自动检测和记录,因而可以作为海事部门分析和裁决海事事故的重要依据。
2 系统的硬件介绍
2.1 单片机的选型及最小系统

图2 单片机外围电路结构
设计选用英飞凌系列XC886八位单片机,英飞凌系列单片机在汽车电子行业广泛应用,芯片可以在汽车恶劣环境下工作,比如温度范围(-40℃~+125 ℃),这与船舶柴油机监测控制环境相似;世界上一些著名船舶动力控制系统厂商采用英飞凌系列单片机为控制核心,如康斯堡主柴油机机舱监测、安全保护系统,主机遥控系统;该芯片性能稳定,适应恶劣环境能力强,因此完全可以满足本次设计对于控制及环境适应能力的要求。
此款单片机其设计基于和工业标准8051处理器兼容的XC800内核,12KB Boot ROM,256B RAM,1.5KB XRAM,32KB Flash,48个数字I/O引脚,8个数字/模拟输入引脚。设计主要运用单片机的串口、定时器、CAN控制器这几个功能模块。
2.2 单片机外围电路介绍
1)电源电路模块如图3所示。

图3 电源电路模块
系统电源采用的是外接24 V电源,熔断器在电路中起到保护电路的作用,防止电路因为过载或短路等原因而损坏;双向瞬态抑制二极管加在电源线上能防止因为瞬间脉冲而造成单片机失灵;开关型降压稳压器LM2576将输入的24 V电压转换成5 V的电压输出;扼流线圈在电路中就是起到抑制共模干扰信号的作用(滤波)。
2)上电复位电路如图4所示。

图4 上电复位电路
传统复位电路利用RC充电原理实现。电容在上接高电平,电阻在下接地,中间为RST。这种复位电路的工作原理是:上电瞬间,电容电流量最大,电容相当于短路,RST端为高电平,自动复位。当电容两端电压达到电源电压时,电容充电电流为0,电容相当于开路,RST端为低电平,程序正常运行,复位结束。此次设计给出的是一种改进电路,电路中并联二极管能保证电源断电瞬间电容能够迅速放电。当上电时,电容两端导通,RST端通过电容接地,低电平输出,则有复位动作。当继续给电容充电时,RST端输出高电平,复位结束。如果不加二极管电源断电将产生电源毛刺,由于电容不能迅速放电,待电源恢复时,电容两端仍是高电压,电路不能自动复位,故而不能正常工作。
3)并转串接口电路如图5所示。
八位移位寄存器74LS165的作用是并行输入,互补串行输出。由图6的时序控制图可知,当移位/置入控制端(SH/L D)为低电平时,并行数据(A-H)被置入寄存器,当移位/置入控制端为高电平时,并行置数控制端被禁止。并行数据被置入寄存器中时,当时钟给一个上升沿后,寄存器中的数据开始移位输出。

图5 并转串接口电路
4)CAN总线接口电路设计如图7所示。为了提高CAN总线的抗干扰性,在设计时应注意以下两点:
(1)选择搞可靠性的CAN收发器,收发器本身具有抗EMI功能;
(2)有针对的设计抗干扰,静电保护的电路。

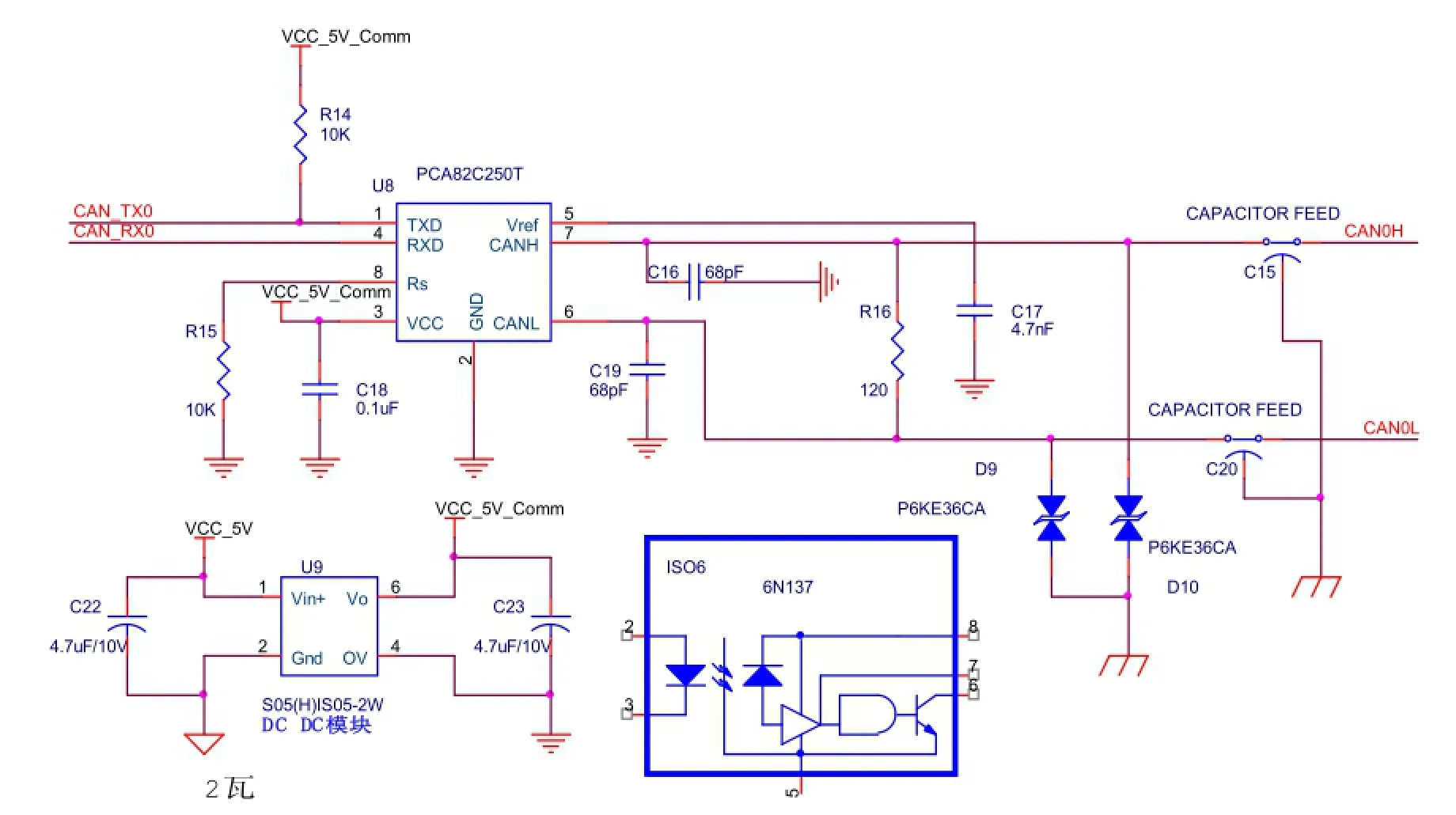
图7 CAN通讯电路
设计中采用双绞线作为CAN总线的数据线,可使回路面积非常小,能消除外部对CAN总线的差模干扰,同时也可以减少CAN总线的磁偶极天线效应,也减少对外辐射干扰。设计采用电气隔离的方式抗干扰。6N137为高速光电耦合器,实现CAN的收发器82C250与单片机的内嵌CAN控制器MultiCAN之间的电气隔离,隔阻电磁干扰的传递,6N137的传输延时时间仅为48ns,满足CAN总线有效回路传输时间的要求。设计中还采用了三端电容,双向抑制二极管起到滤波的作用,图中的左下角为隔离电源模块,可以隔离高速光耦两侧的电源VDD与VCC,否则光电隔离将失去应有的作用,在收发器与光电隔离器的电源端与地之间接一个较小的电容,可以降低干扰。
5)485 总线通讯电路如图8所示。
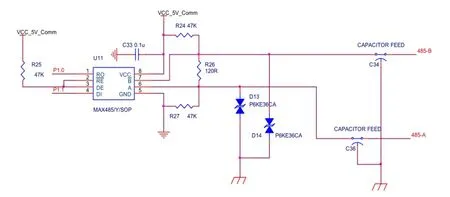
图8 485总线通讯电路
系统设计将驾驶室通过485通讯电路接到VDR,将应急车钟使用状态实时发给VDR。电路中采用了MAX485芯片作为收发器,MAX485芯片采用半双工的通讯方式,即发送数据和接收数据两者只能同时有一种动作。由于设计需要将车令状态发送给VDR,因此收发器接入高电平端。同时电路中加上双向抑制二极管和三端电容,起到滤波的作用,增强电路的抗干扰能力,提高通讯的可靠性。
6)报警输出电路电路如图9所示。
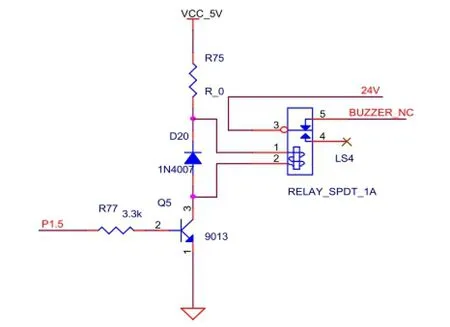
图9报警输出电路
系统检测到诸如失电报警、错向报警、失步报警的信号时,单片机引脚将输出信号,三极管导通,高电压将接入到继电器,继电器线圈将产生感应电动势,使得继电器开关吸合从而输出报警信号,当断电后由于续流二极管IN4007的续流作用,同二极管并联的继电器回路仍然存在电流,继续输出报警信号。
3 系统的软件介绍
3.1 系统的主程序流程
图10是车钟主程序流程图,包括了初始化程序、按键扫描程序、相应的通讯程序。主程序首先需要进行初始化,硬件的初始化在DAvE中已经完成。软件的初始化设定车钟档位最初处于停车同步状态,当达到同步后再通过CAN总线以中断的形式接收,系统开始要进行按键扫描,检测标志位及试灯相关操作,系统定时将这些信息通过通讯总线发送至控制单元。控制单元要将所接收的信号与自身的状态相比较,得出结论判断是否需要报警。
3.2 CAN通讯程序设计
实现应急车钟系统的CAN网络通讯,包括对系统硬件及软件的初始化及总线的收发程序。熟悉这三部分程序的设计就能编写利用CAN总线进行通讯的一般应用程序。在通讯中我们采用定时发送的方式发送报文,以中断的方式接收报文。
3.3 485通讯程序设计
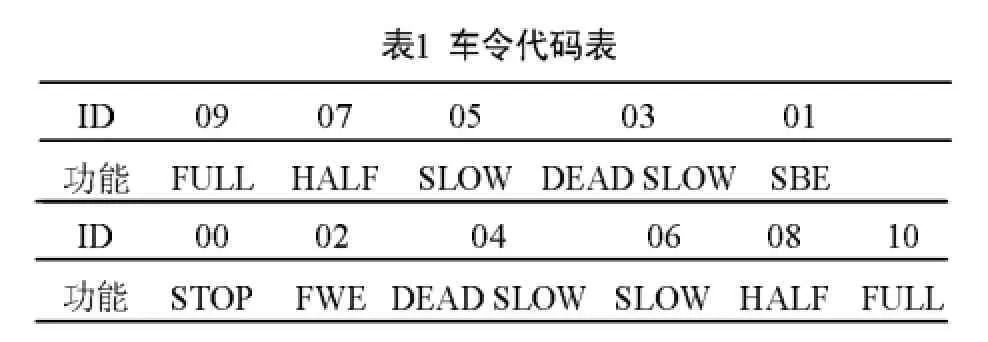
车钟与VDR 之间通讯数据格式见图12。车令代码见表1。其中单数为正车档,双数为倒车档。
3.4 实验平台
图13为系统联调框图,包括了发送器、复示器、接收器、USB-CAN适配器四个节点,分别都接在CAN总线上,USB-CAN适配器的作用是实现现场总线与PC机之间的通讯,电缆线两端跨接有终端电阻,以消除通讯电缆中的信号反射,提高通讯可靠性。

图10 主程序流程图

图11 CAN的通信流程图

图12 车钟与VDR 之间通讯数据格式
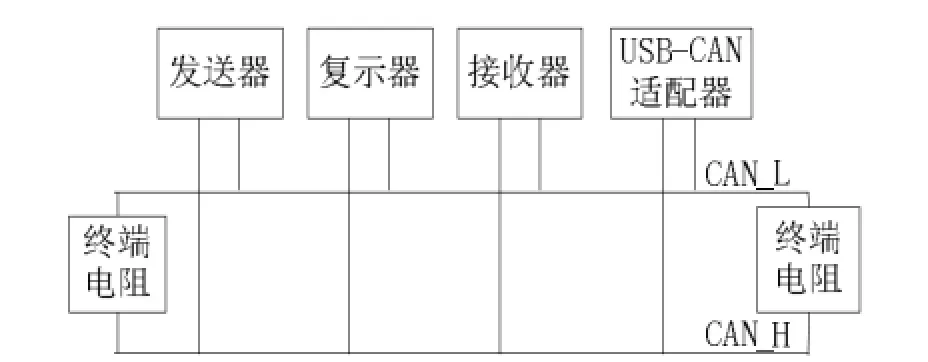
图13 系统联调框图
4 小结
设计的基于单片机控制的船用应急车钟系统,实现了驾驶室、集控室、机舱三地之间对于主机的转速和转向的遥控。系统结构简单、操作方便、易于掌握、具有高可靠性、抗干扰能力强等优点,系统运行时安全可靠,完全可以满足船舶航行时抗振动、耐高温、耐潮湿的要求。
设计了应急车钟电路原理图,绘制了电路板PCB封装图,设计了操作面板,焊接制作了三块电路板,组装了可以满足系统功能调试的应急车钟样机。现已在多条内河船舶试运行,反馈效果良好。
[1] 黄宇航. 新型船用电子应急车令设计方案介绍[J].微计算机信息, 2007, (23): 32.
[2] 邱宏. 基于RS485通讯技术的船舶应急车钟系统[P]. 中国, 实用新型专利, 201020186961. 2010. 05. 07.
[3] 简庆年, 韩华, 陈其浩. YCC型船用分布式单片机传令车钟系统的研制[J]. 机电设备, 1999,(l).
[4] 张永浩, 韩小刚. 计算机通讯技术在船舶上的应用[J]. 船海工程, 2002, 147(4).
Design of CAN-bus Marine Emergency Telegraph
Liu Dongsen
(Fuyang Local Maritime Bureau, Fuyang 236000, Anhui, China)
Marine electronic emergency telegraph is applied to a driving control of ships' electronic communication device which is the backup of main engine telegraph on board, and the order can be send to the “ control room” and “engine room” to make sure that the ship can sail safety under emergency situation. The emergency telegraph has three parts like the transmitter, repeater and receiver. It can provide transmission of information during bridge, control room, engine room, and also has the function alarm. The design use MCU as the control center, and use CAN bus as the communication carrier during transmitter, repeater and receiver, having the configuration flexibility and less wire compared to old-fashioned telegraph.
emergency telegraph; MCU; CAN-bus
TP273
A
1003-4862(2015)06-0054-06
2015-03-17
刘冬森(1990-),男,助理工程师。研究方向:船舶系统仿真与自动化。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
防爆电机(2021年3期)2021-07-21
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
电子制作(2017年7期)2017-06-05
中国科技信息(2016年19期)2016-10-25
空间控制技术与应用(2015年2期)2015-06-05
