
斜坡补偿在制动能量回收中的应用研究
2015-06-27 05:45刘小虎吕兆瑞
船电技术 2015年6期
刘小虎,吕兆瑞
(海军工程大学电气工程学院,武汉 430033)
斜坡补偿在制动能量回收中的应用研究
刘小虎,吕兆瑞
(海军工程大学电气工程学院,武汉 430033)
针对制动能量回收中BUCK变换器的不稳定问题,从斜坡补偿的基本原理出发,设计了一种斜坡补偿电路,该电路采样简单的阻容电路和RS触发器对主控芯片TMS320F2812的PWM信号进行了修正,实验结果验证了理论分析的正确性。
制动能量回收 BUCK变换器 斜坡补偿
0 引言
制动能量回收技术是电动汽车节能减排的关键技术之一,制动能量回收的主电路一般采样双向DCDC的拓扑结构,而双向DCDC的控制模式分为电压控制和电流控制模式,其中电流控制模式因为其动态响应快,补偿电路简单,增益带宽大,输出电感小,易于均流等优点而被广泛应用。当采用峰值电流模式并且占空比大于50%时存在如下问题:次谐波震荡、系统开环不稳定以及由此引起的抗干扰能力差,特别是当电感中的纹波电流成分很小时,这种情况更为严重[1-2]。解决上述问题的方法就是引入斜坡补偿电路。
目前对斜坡补偿的研究集中在补偿信号的产生及补偿斜率的调整,文献[3]设计了一种自适应斜坡补偿电路,利用占空比和补偿斜率之间的关系,实现斜率的自适应调整。文献[4]设计了一种基于CMOS的斜坡发生器电路来实现斜坡补偿,该方案避免了片内震荡参数对斜坡补偿的影响,并使斜坡线性度和温度稳定性更好。上述方案都存在控制电路复杂,同时不能对主控芯片PWM的信号进行修正。本文采用了简单的阻容电路和RS触发器,实现了斜坡补偿,实验结果验证了该方案的有效性。
1 斜坡补偿原理分析
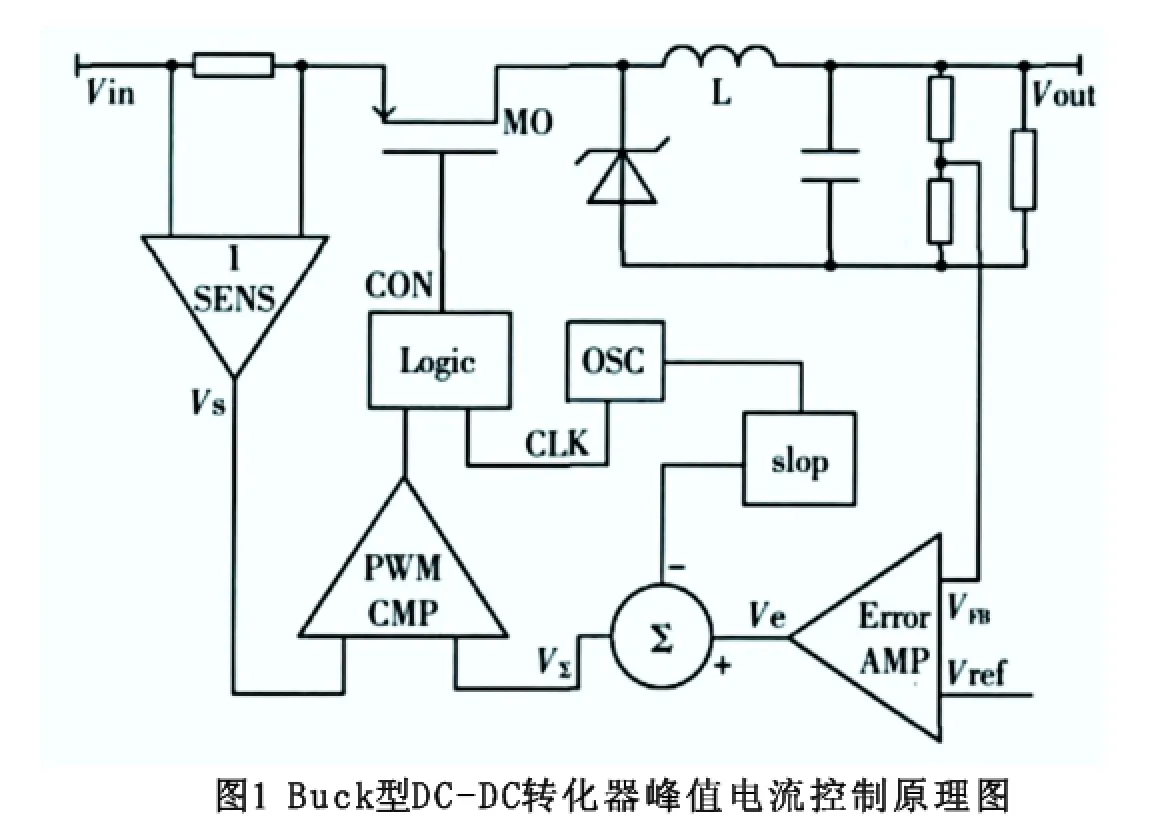
图1是BUCK型DCDC变换器峰值电流控制控制原理图。误差比较器Error AMP对输出电压采样信号Vfb与基准电压Vref的差值进行放大,得到控制信号Ve。在一个开关周期内,Vfb的变化很小,因此可以近似认为Ve在一个开关周期保持不变。Ve与斜坡补偿模块slop产生的斜率为k的斜坡电压Vslop相减,产生一个斜率为-k的周期性控制电压VΣ。电流采样放大器对开关电流进行采样并放大,得到电流采样信号Vs,输入到PWM比较器正向端。当电流上升,Vs=VΣ时,PWM比较器翻转输出高电平,关断功率管,电感电流线性下降,直到下一个时钟周期到来。可以得出结论:在一个时钟周期内,控制电压VΣ为本周期内的电流设定了最大值,因此也称为峰值电流控制模式。
在峰值电流控制模式下,如果电感电流连续,在每个控制周期,电感电流上升和下降的波形见图2:

图2 CCM模式下电感电流波形
由图2可得:

可见,要使系统稳定,应有ΔIL<ΔI0,也就是D<0.5。当D>0.5时,电感电流IL波形变化量越来越大,系统进入不稳定状态。为了解决D>0.5时工作在CCM模式下的峰值电流变换器的不稳定性问题,可以引入斜坡补偿,见图3。
根据图3的波形可以看出,通过引入斜坡-m,可以得到:

经过n个周期后,0IΔ引起的电流误差nIΔ为:

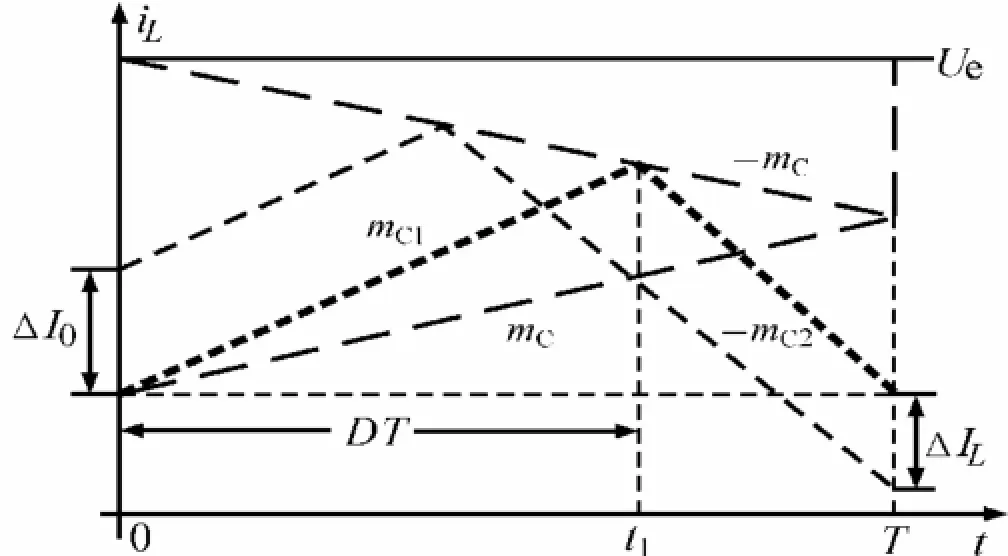
图3 补偿后波形
如果能保证

那么电流误差将逐渐衰减到0。根据式(1),消去m1,可以得到加入斜坡补偿后,保证系统稳定的条件:

式(5)说明了峰值电流控制斜坡补偿和电源系统稳定性之间的关系:①系统未加入斜坡补偿,即m=0时,稳定的条件是占空比必须小于50%;②m是D的函数,D越大,所需m也越大。
2 斜坡补偿电路实现
下面给出一个基于RC谐振方式的斜坡补偿电路的实现,其原理图见图4:

图4 斜坡补偿电路原理图
图4中,Q1,R3,C1构成充电回路,R4,C1,Q2构成放电回路,该斜坡信号与电流采样信号叠加后与参考值进行比较,最后经过LM111比较器输出后对TMS320F2812信号进行校正,该电路的最大特点是斜坡的斜率随占空比自动调整,克服了斜坡补偿在固定斜率补偿时可能出现的问题。
3 实验验证
在某制动能量回收系统中,直流发电机组带直流电动机工作。当设备制动时,直流电动机改为发电模式,要求制动能量回收系统能够将制动时的电能贮存在蓄电池中,而当直流电动机正常运行时,蓄电池放电回馈到直流电动机。为了完成该制动能量回收的任务,采用了并联双向DCDC在直流母线侧,同时为了解决直流母线电压大范围波动的难题,采用了两级DCDC串联工作的方式。具体来说,当对蓄电池充电时,先用BOOST电路对直流母线电压升压到1600 V,然后再用BUCK电路对蓄电池充电。反过来,当蓄电池回馈能量时,先BOOST电路对蓄电池电压升压到1600 V,然后用BUCK电路降压到直流母线。图5为蓄电池回馈时的电压电流波形。
图5从上之下分别为:蓄电池电压,蓄电池回馈电流,PWM波形,输出电压,从图中可以看出,当占空比大于50%时,系统能够稳定的运行。
4 结论
本文从基本的斜坡补偿原理出发,结合制动能量回收系统的具体应用特点,设计了一种基于RC谐振方式的斜坡补偿电路,该斜坡补偿电路能够自动随占空比调整斜率,实验结果验证了该方案的有效性。

图5 实验波形
[1] 陈富吉, 来新泉, 李玉山.一种自适应斜坡补偿电路的设计与实现[J]. 半导体学报, 2008, 27(4): 494.
[2] 李帅, 张志勇, 赵武等.一种用于BUCK DCDC转换器的自适应斜坡补偿电路[J]. 电子技术应用, 2010: 51-53.
[3] 田锦明, 王经卓, 曹双贵等.峰值电流模式变换器自适应斜坡补偿电路设计[J].电子器件, 2008, 31(2): 480-483.
[4] 刘树林, 刘健, 钟久明. 峰值电流控制变换器斜坡补偿电路的优化设计[J]. 电力电子技术, 2005, 39(5): 78-80.
Slope Compensation Circuit for Regenerative Brake System
Liu Xiaohu, Lyu Zhaorui
( School of Electric Engineering, Naval University of Engineering, Wuhan 430033, China)
Buck DC-DC converter has the problems such as instability in the application of regeneration brake system. According to the principle of slope compensation, simple slope compensation circuit is carried out for peak current mode converter. The slope compensation circuit is composed of one resistor and one capacitor in series to rectify PWM duty from control chip TMS320F2812. The experimental results show its validity and feasibility.
Buck DCDC; regeneration brake; slope compensation
TN432
A
1003-4862(2015)06-0045-03
2015-03-26
国家科技支撑计划“大型机械能量回收与利用关键技术开发与应用”( 2014AA04B00);海军工程大学2015大学自然科学基金(HGDQNEQJJ15011)
刘小虎 (1976-),男,博士。研究方向:逆变技术及其应用。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
河北理科教学研究(2020年2期)2020-09-11
物理之友(2020年12期)2020-07-16
当代陕西(2019年6期)2019-04-17
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
天津诗人(2017年2期)2017-11-29
福建中学数学(2016年7期)2016-12-03
中学生数理化·高二版(2016年5期)2016-05-14
有色金属设计(2014年4期)2014-03-11
