船载双平台式惯导加速度计零位动态标定研究
2015-06-23 16:27:36吴兴存
无线电工程 2015年9期
刘 智,刘 航,吴兴存
(中国卫星海上测控部,江苏 江阴 214431)
船载双平台式惯导加速度计零位动态标定研究
刘 智,刘 航,吴兴存
(中国卫星海上测控部,江苏 江阴 214431)
在惯导系统中,如果加速度零位不准确便会影响到测量船精度的提高。船载情况下,船体晃动明显,惯导工作环境比较恶劣且时间长,因此加速度计会出现精度下降甚至无法正常工作的情况。因此在更换加速度计后,需要在静稳定的情况下对零位进行标定。论述了惯导原理,通过对船载惯导工作中的具体情况以及数据的分析,提出了在某些特殊的应急条件下,加速度计零位的动态标定方法。实验结果表明,该方法可靠性高,能够满足应急条件下加速度计的标定,标定的结果满足船载惯导系统需求。
平台惯导;加速度计零位;标定;测量船
0 引言
目前我国航天测量船为单站定位体制,船载测控设备是在动态条件下进行的。由于载体位置和姿态处于变化当中,必须在测量设备跟踪被测目标的同时,进行同步测量载体的位置和姿态,并在甲板坐标系和大地坐标系之间进行变换,才能与整个试验航区建立联系[1]。
因此测量船上完成船姿船位测量的设备的精度直接影响测量船的总体精度,在设备装船以及任务中必须对其精度进行标定就成了关键[2]。惯性导航系统(简称惯导)是航天测量船船姿船位基准测量设备。惯导标校是指对惯性元件即陀螺仪和加速度计的标度、漂移及零位等参数进行标定和校准的过程,标校结果的准确度直接关系到测量船的精度。惯导系统在更换惯性元件、部分电子线路板检修、惯性平台维修后,一般都需要进行相应的参数标定工作。
在惯性原件的标定中,陀螺漂移和水平陀螺标度等参数可在码头进行自标定,除此之外的方位陀螺大小档标度、加速度计零位、加速度计标度和姿态角零位等大多参数的标定需要在静基座条件[2]下进行。实际情况中,满足静基座条件的只有干坞坐墩标校即坞内标校。如果在码头或海上需要更换惯性元件,不能满足静基座条件,惯性原件的大部分参数无法精确标定。惯导的动态标校是相对静基座条件而言的,在码头、航行状态下标校都可称为动态标校。
为了解决这些问题,之前的研究中有平台旋转法估算加速度计零位误差、平台施矩法估算方位陀螺大档标度误差等[3]。但是,加速度计标度、加速度零位等参数,还没有行之有效的、系统的动态标定方法。
本文针对上述情况,研究在动态条件下加速度计零位的标定。经过试验验证,并与静态条件下的加速度零位标定进行对比,其精度能够满足要求。
1 动态标校的主要内容
水平、方位电气零位标定一般统称为姿态角电气零位标定,即标定惯导系统的航向、纵摇和横摇的电气零值,也是全船坞内标校的主要项目。惯导系统的标定在静基座条件下进行。在静基座条件下,位置不变、速度为零,水平姿态角为接近于零的固定值,能够排除有害加速度干扰;在码头条件下,位置不变,速度近似为零,但是姿态角并不是固定值,存在一定的外界加速度干扰;在海上条件速度、位置、姿态角都不是固定值,因此在动态条件下对系统的参数精确标定是比较困难。
航天测量船的惯导系统为船载双平台系统,经过较长时间校准后惯导系统具有很好的短期稳定性,因此可以使得一套惯导保持稳定的工作状态以作为参考基准,通过动态标定方案,推导出动态标定的数据处理模型,对另一套惯导按设计方案进行特定的平台施矩控制,惯导显控台同步录取数据,经过对2套惯导数据进行同步处理和运算,得到被标定惯导的标定结果,实现惯导系统的动态标定。
惯导加速度计动态标校要求在动态条件下加速度计零位标定小于0.3脉冲/s。
2 加速度计零位动态标定
2.1 加速度计零位含义及影响
加速度计零位是指惯性平台在静态条件下,平台处于水平状态,加速度回路每秒输出的脉冲数[4]。
加速度计零位误差主要影响惯导的水平精度。设ΔAy0、ΔAx0分别为北向、东向加速度计零位误差,根据误差理论,引起2条水平回路的稳态误差为:

式中,α、β为相对于大地方位正北和正东方向的倾斜量,在船摇纵摇、横摇上的表现随航向变化而变化;g为重力加速度。
2.2 加速度计零位的坞内标定方法
根据加速度计零位的定义,要求在静态条件、平台处水平状态下,加速度计每秒输出的脉冲数。但是在实际情况中,平台真正的水平状态非常困难。将平台内、外环用定位销销住固定,并用橡皮筋捆牢,将平台台体方位输出拨动至0°、90°、180°和270°四个方位,然后再求平均值[5]。
加速度计零位人工标定方法具体步骤为[6]:
①船坐墩稳定后,系统加电开机,加温,不启动陀螺(陀螺启动开关在断开位置),在加速度计到温后,停机断电。
②去平台上盖,插入销钉(粗销)后,固定平台或用橡皮筋绑内、外环,开机加电,用绝缘螺丝刀拨动台体,将方位转到0°。
③启动控制计算机程序。装订系统命令“14018”系统每100 s自动进行加速度计零位的计算(打印脉冲数)。待数据稳定后,记录10组有效数据,取平均值做为该方向的加速度计输出值。
④拨动台体,进行下一个方向上再进行统计计算。
2.3 加速度计零位动态标定原理
通过惯导原理分析,加速度计零位误差将引起惯导系统的水平稳态误差[7]。系统更换加速度计后,需要对加速度计零位进行精确标定,而加速度计零位标定需要在静基座条件下进行。测量船出于机动状态,如果系统需要,或者加速度计需要更换后,船没有进坞条件,就只能在动态条件下对系统进行水平误差估算和加速度计零位调,也就是加速度计零位的动态标定[8]。
利用在航天测量船上的2套独立的惯导系统,可以在动态条件下进行加速度计零位标定,需要将其中一套惯导做比对基准,对另一套惯导进行标定。
根据式(1),在正常情况下惯导的加速度计零位误差将引起水平姿态角误差。从数据上分析为,船摇纵摇、横摇的表现随航向K变化而变化[9,10]。设惯导水平姿态没有误差时的真实横摇θ真、纵摇ψ真,惯导正常工作状态时,实际横摇θ、纵摇ψ与加速度计零位引起的水平误差α、β有以下关系:

加速度计零位动态标度的方法为平台旋转法,是由人工设置、计算机控制将其中一套惯导平台旋转使其工作在“北—西—天”状态,此状态在惯导初校的第一阶段。这时东向加速度计零位误差将引起台体南北倾斜,北向加速度计零位误差引起台体东西倾斜。这时船摇ψ、θ与α、β的关系为:

为了区别2种状态下的水平姿态角,分别以下标EN、NW表示惯导处于“东—北—天”(正常工作状态)和“北—西—天”状态的纵横摇。若旋转惯导1,则推到过程如下:
平台旋转前,2套惯导需要进行综校,使系统经过较长时间的稳定工作,漂移得到充分补偿。这时惯导1和惯导2都处于正常工作状态,船摇ψ、θ与α、β的关系为:

在船载平台中,2套惯导的位置在装于同一吊桶内,2套惯导之间没有变形,船摇真值相同,当惯导1在正常状态时,船摇真值的下标记为“真EN”。同时记录惯导1与惯导2的水平数据,做差,Δψ1EN-2=ψ1EN-ψ2、Δθ1EN-2=θ1EN-θ2,得到

另外一套惯导保持工作状态,船体航向K保持不变,要求在码头状态或匀速直线航行,旋转惯导1平台,使它工作在“北—西—天”状态,稳定后有:
同时记录下2套惯导的水平数据,2套之间做差:Δψ1NW-2=ψ1NW-ψ2,Δθ1NW-2=θ1NW-θ2,

对Δψ1EN-2、Δψ1NW-2和Δθ1EN-2、Δθ1NW-2进一步做差,可消除惯导加速度计零位误差引起的水平误差。得到
根据式(10)解得:
求得的α1、β1即为由平台旋转法求得的惯导1的水平误差。
根据水平误差角α、β,估算加速度计零位误差ΔAx0、ΔAy0的关系式为:

式中,Jx、Jy分别为对应东向、北向加速度计的标度。
东向、北向加速度计新零位ΔAx0、ΔAy0计算公式为:

式中,ΔAx0、ΔAy0即为新标定的加速度计零位;ΔAx0_old、ΔAy0_old为原加速度计零位。
2.4 加速度计零位动态标定试验
测量船在海上航行中,惯导导航运行后通过经纬仪测星发现2套惯导纵横摇有一定偏差,惯导1纵横摇误差分别为-x.45′、x.25′,惯导2纵横摇误差为-x.3′、x.1′,均不满足要求;随后对2套惯导分别进行码头系泊状态下加速度计零位动态标定检查,检查发现惯导1东向加速度计变大1.5脉冲/s,北向加速度计零位变小2.1脉冲/s,惯导2北向加速度计零位变小1脉冲/s。针对此情况,利用靠码头期间,更换加速度计,利用加速度计零位动态标定方法对2套惯导加速度计零位进行了标定,利用惯导2作为基准对惯导1加速度零位进行标定,结果如表1所示。之后结合备件更换,以惯导1为基准,对惯导2加速度计零位进行了标定,结果如表2所示。
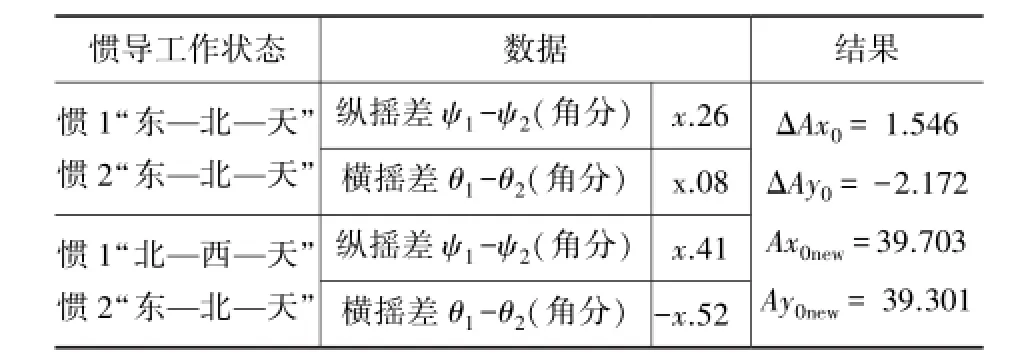
表1 惯导1加速度计零位动态标定结果

表2 惯导2加速度计零位动态标定结果
根据以上标定结果,装订新加速度计零位后,分别再进行一轮次的检查,发现2套惯导的“北—西—天”和“东—北—天”状态的姿态角差稳定,变化在0.1角分以内,说明加速度计零位误差在0.3个脉冲以内。
通过试验与数据分析发现,这种动态标定方法措施有效,能够最大程度地满足测量船需要。
3 结束语
针对加速度计零位对于惯导精度的影响进行分析,进而从提高测量船精度提高以及加速度计对于测量船精度的影响进一步剖析。根据实际航天测量船环境,从惯导原理出发,提出了一种动态环境下标校的方法,经过试验验证该方法切实有效。该方法能够弥补无法进坞环境下,对加速度计的应急要求,为今后测量船水平姿态精度的提高提供了有力的保障条件。
[1] 潘 良.航天测量船船姿船位测量技术[M].北京:国防工业出版社,2009.
[2] 张振庄,耿大孝.船载天线动态校相技术研究与实现[J].无线电通信技术,2015,41(1):52-55.
[3] 肖正林,钱培贤.惯导平台加速度计安装误差自标定方法研究[J].弹箭与制导学报,2005,25(4):759-762.
[4] 李 巍,任顺清,赵洪波.惯性元件的失准角分离技术研究[J].哈尔滨工业大学学报,2012(1):43-46.
[5] 毛友泽,张 海.无依托状态加速度计的新型标定方法[J].北京航空航天大学学报,2011(1):123-126.
[6] 李 巍.惯导平台测试方法与参数辨识研究[D].哈尔滨工业大学,2008.
[7] 乔仁晓,孟晓风,季 宏.加速度计非线性项系数校准误差分析与建模[J].系统仿真学报,2008(6):1 633-1 635.
[8] 焦 巍,刘光斌.加速度计动态误差系数在三轴转台上标定的仿真[J].兵工自动化,2005(6):71-73.
[9] 任顺清,冯士伟,马向斌.加速度计的全组合标定方法[J].中国惯性技术学报,2007(6):760-764.
[10] 胡礼勇,李 钊,李建军.基于小波的惯导系统初始对准方法研究[J].无线电工程,2011,41(4):31-33.
[11] 张 鑫,刘 锋,刘 勇.多相编码信号谱相关特征检测与参数估计[J].无线电通信技术,2011,37(5):31-33.
The Research on Dynamic Calibration for Accelerometer Zero of Shipborne Double INS
LIU Zhi,LIU Hang,WU Xingcun
(China Satellite Maritime Tracking&Control Department,Jiangyin Jiangsu 214431,China)
There aremany factors influencing themeasurementaccuracy of TT&C ship.In the inertial navigation system(INS),if the acceleration zero is inaccurate,themeasurement precision of a ship would be affected.In marine environment,the ship often shakes seriously and INSworks in poor environment for long hours.The accelerometer accuracy degrades and even does notwork.In case of replacing the accelerometer,the ship is required to calibrate the accelerometer zero in static stability condition.Explanation of INS principle and analysis of the shipborne INS data and situation is provided.A method of dynamic calibration of accelerometer zero in emergency conditions is proposed.Experiment results show that themethod provides high stability and meet emergency conditions accelerometer calibration.Calibration results satisfy the onboard INS requirements.
INS;accelerometer zero;calibration;TT&C ship
U666.12;V249.322
A
1003-3106(2015)09-0030-04
10.3969/j.issn.1003-3106.2015.09.08
刘 智,刘 航,吴兴存.船载双平台式惯导加速度计零位动态标定研究[J].无线电工程,2015,45(9):30-33.
刘 智男,(1987—),工程师。主要研究方向:航天测控。
2015-05-11
刘 航男,(1987—),工程师。主要研究方向:航天测控。
猜你喜欢
环球时报(2022-08-15)2022-08-15 17:13:41
军事文摘(2021年22期)2022-01-18 06:21:58
现代机械(2021年3期)2021-07-12 00:47:42
客车技术与研究(2019年5期)2019-10-24 02:22:44
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
智富时代(2017年7期)2017-09-05 10:08:11
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
计算机工程(2015年4期)2015-07-05 08:28:57
电子设计工程(2015年3期)2015-02-27 12:03:53