基于人工势场的潜艇搭载AUV回收路径规划*
2015-06-23 13:52刘昌鑫李勇强
火力与指挥控制 2015年7期
高 剑,刘昌鑫,李勇强
(西北工业大学航海学院,西安 710072)
基于人工势场的潜艇搭载AUV回收路径规划*
高 剑,刘昌鑫,李勇强
(西北工业大学航海学院,西安 710072)
紧密结合未来无人作战侦察对潜艇搭载自主水下航行器(AUV)水下自主回收的需求,对水平面内基于水声定位的AUV的自主回收对接技术进行了研究。运用了基于人工势场的导引方法规划了AUV的回坞路径,然后基于AUV的运动方程设计了滑模跟踪控制律来解决AUV在复杂的回收环境下的避障问题,并通过引入“填平势场”来引导AUV走出局部极小点。最后采用了REMUS AUV的模型参数对水下回收进行了仿真试验研究,仿真结果验证了方法的有效性。
自主水下航行器,自主回收,人工势场,局部极小点
0 引言
自主水下航行器(Autonomous Underwater Vehicle,AUV)具有低成本、高自主性、隐蔽性好及机动性强等优点,在军事海洋侦察、武器投送、科学考察、海洋环境监测、海底勘测、管路检修、海底打捞、油田勘测、水下反恐等领域有着重要而广泛的应用。AUV执行任务时需要自带能源,受体积和质量的限制,所携带的能源十分有限,特别是潜艇搭载的AUV,需要在水下回收对接以进行能量补充与工作数据交换。因此,水下对接回收技术成为目前AUV研究的一个重要方向[1]。
美国海军研究生院(Naval Postgraduate School,NPS)采用模糊控制方案,研究了Phoenix AUV的潜艇鱼雷发射管回收方案[2-3],将回收分为9个区域,在每一个区域都预先确定一条期望的路径,制定不同的模糊策略。当AUV依据声纳系统航行至回收管附近时,由战术层完成环绕回收管的路径规划。当AUV进入回收管开口区域,战术层发出回收命令,执行层利用规划好的回收路径控制AUV完成回收。韩国船舶与海洋工程研究所的Pan-Mook Lee等人提出了视觉伺服控制(Visual Servo Control)[4-5],将对接目标投影在CCD平面上,建立了该投影坐标变化与AUV运动的联合线性时变方程组,通过预测控制求解该MIMO控制问题。韩国科技高等研究所的Myung-Hwan Oh和Jun-Ho Oh将回收过程划分为基于LBL的回坞阶段和基于SSBL和CCD摄像机的对接阶段[6],在回坞阶段,基于回收目标点的坐标和斜率、起始点坐标和斜率,采用三次样条算法进行路径规划,并对曲线长度和最大曲率进行优化,然后采用基于线性模型的滚动时域模型预测控制方法进行路径跟踪控制,并考虑了回收器水平和垂直晃动的情况。英国南安普顿大学的Pakpong Jantapremjit和Philip A.Wilson依据安装在回收器上的传感器网络,采用基于人工势场方法的平均矢量场计算期望的轨迹[7-8]。在回坞阶段,采用传统的人工势场法,产生一条无碰航路到达对接准备点。在对接阶段,采用切换加权系数的矢量场法,导引AUV沿一定路径运动,最终到达对接所要求的方位和位置。
本文紧密结合未来无人作战侦察对潜艇搭载AUV水下自主回收的需求,采用基于人工势场的导引算法,研究了AUV的水下对接导引控制问题,定义潜艇周围的危险区域为障碍物,通过对引力场的改进满足AUV到达终点时刻的方向要求,并引入填平势场解决了复杂环境下的局部极小点问题,然后基于AUV的运动方程设计了AUV的滑模跟踪控制律。仿真结果验证了方法的有效性,具有较好的工程应用前景。
1 问题描述

图1 AUV在回收过程中的避障航行轨迹示意图
AUV在潜艇回收对接过程中,如图1所示其回收站设在潜艇背部时,AUV在航行的过程中要安全的避开潜艇的尾部和潜艇的首部等禁止航行的危险部位,最后AUV能够安全到达回收站,成功实现对接。
在自主回收对接过程中,AUV通过自身搭载的超短基线(USBL)测量安装在对接站上的信标距离和方位角进行定位。与其他机器人导引问题相比,AUV的对接导引除了要解决到达目标点的问题,还要保证AUV到达目标位置的方位。
2 回收路径规划
人工势场法(APF)的概念最初由Khatib提出,在他的博士论文机器人操作臂的避障运动规划中得到成功运用[9]。人工势场法不需要提前获取运动空间全局信息,且相对于其他路径规划方法有规划时间短、执行效率高的优点,故适用于对实时性和安全性要求较高的任务。针对AUV的特殊运动环境和自身的特点,采用人工势场法为AUV规划一条平滑、安全的回收轨迹。
本文将危险区域作为障碍物产生斥力场,目标回收站产生引力场,AUV在运动空间中运动沿其受到的引力和斥力的合力方向,向回收站方向运动。假设全局坐标系下AUV在工作空间中的位置为X=[x y]T,回收站的位置为Xg=[xgyg]T,则回收站与AUV之间的引力场为:

定义引力Fatt为引力的负梯度:

障碍物与AUV之间的斥力场的定义为:

则斥力定义为斥力场的负梯度:

其中,η为位置增益系数,ρ(X,Xg)是AUV与回收站之间的欧氏距离,μ为斥力增益系数,ρ(X,X0)为AUV与障碍物之间的欧氏距离,ρ0为常数,是障碍物之间的影响距离,N为大于零的任意实数。此时根据人工势场的基本原理可知,总势场U以及回收对接控制中的AUV所受的合力分别可表示为:

传统的人工势场规划出的路径虽然比较高效、平滑和安全,但在复杂工作环境下通常存在着局部极小点的问题[10],即AUV在靠近回收站时同时受到引力和斥力的合力为零,人工势场法会产生局部极小点,一旦AUV陷入局部极小点就不能到达回收站的位置,便会出现回收站不可达问题,在狭窄区域易发生路径抖动等现象。当AUV处于局部极小点时,现引入填平势解决局部极小点问题,填平势模型为:

其中,ρ(X,Xg)为AUV与回收站目标点之间的欧氏距离,ρa为AUV是否到达回收站目标点的评判距离,s为正比例系数,则全方位AUV的总势场如式(7)所示,当AUV处于局部点时由式(7)加上填平势作为总的势场,如式(10)所示:

回收对接控制中的AUV运动体所受的合力为:

其中,Fadd为填平势场对AUV产生的引力。若AUV在航行过程中,AUV分别受到回收对接控制中的势场合力F在x轴方向上的力Fx和y轴方向上的力Fy,则AUV在人工势场中的参考航向角度为:

参考航行的角度在-180°~+180°之间。
3 航向滑模跟踪控制
在全局坐标系下,AUV的航向角为ψ,前向速度为u,侧向速度为v,航向角速度为r。定义潜艇回收站中轴线为期望的入坞直线航路,建立入坞坐标系oDxDyD,xD轴沿入坞直线指向进入回收站的方向,原点oD位于xD轴上,yD轴与xD轴垂直向右。于是回坞直线航迹跟踪误差用坐标yD描述,称为横向跟踪误差。假定AUV具有良好的速度控制,前向速度u=uc>0为常值。直线航迹跟踪对AUV的坐标xD无控制要求,AUV的水平面运动模型可以描述为:

其中,m11、m22、m33为包含附加质量的惯性系数,d22、d33为阻尼系数,δr为方向舵,Nδr为方向舵的力矩系数。
现采用滑模控制技术设计AUV航向跟踪算法,使AUV跟踪势场力导引指令。
定义航向角跟踪误差:

及切换函数:

设计滑模控制,令切换函数的导数:

4 仿真研究
采用了REMUS AUV的模型参数对本文所提出的基于传统人工势场的AUV回收对接控制与引入填平势场后的人工势场回收对接控制分别进行了数学仿真验证。
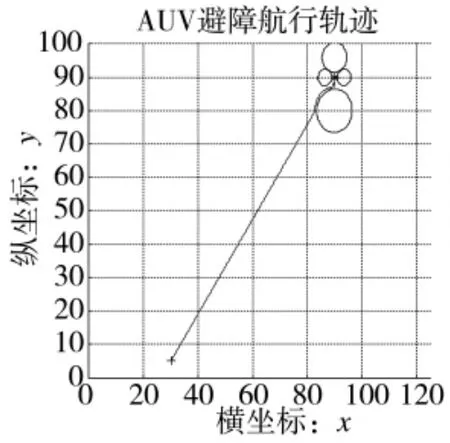
图2 AUV在传统人工势场的航行轨迹图

图3 AUV在传统人工势场的航行轨迹局部放大图
图2是AUV在传统的人工势场中的AUV避障航行轨迹示意图,图中AUV初始位置是(30,5),回收站的位置坐标是(90,90),图中的4个圆代表的是禁止对接区域,即障碍物的位置,其坐标分别为(90,96),(90,80),(86.5,90),(93.5,90),AUV与潜艇保持相对静止。图中显示,AUV在航行过程中避开了障碍物,最后到达了回收站。但是如图3所示,AUV在回收对接过程中进入回收站时,航行轨迹出现了徘徊抖动的现象,并且局部反复出现锯齿状的航行轨迹,航向角度不断出现大角度的变化,在回收站入口时,AUV出现停止不前的状态。并且AUV的航行轨迹不是很光滑,不是较为理想的AUV航行轨迹。
图4是AUV在引入填平势场后的AUV避障航行轨迹示意图,其中控制参数障碍物的影响范围ρ0=1.5,斥力的增益系数μ=50.0,调节常数N=0.55,引力系数k=0.2,填平势场的引力系数s=2.0,4个禁止对接区域即障碍物用圆表示,圆心坐标分别为(90,96),(90,80),(86.5,90),(93.5,90),半径分别为4.5,6.5,2.5,2.5。其中图5是AUV在局部极小点附近的航行轨迹图,由图显示,AUV在进入回收站附近时,AUV安全地避开了禁止航行区,最终到达了回收站目标点。航行的轨迹较为平滑,没有出现曲线的反复抖动,所以采用改进型的人工势场能有效地消除传统的人工势场法的局部极小点问题,使AUV能够安全地避开禁止回收对接区域,能够进入期望的回收站实现回收对接。

图4 AUV避障航行轨迹回收对接图

图5 AUV避障航行轨迹回收对接局部放大图
5 结论
本文采用人工势场法对潜艇搭载AUV的自主回收路径规划问题进行了研究,通过引入填平势场使AUV走出局部最小点,避免了回收站不可达和狭窄区域的路径抖动。仿真结果证明了该方法的有效性。下一步将针对潜艇在运动状态下的AUV回收路径规划问题进行研究。
[1]燕奎臣,吴利红.AUV水下对接关键技术研究[J].机器人,2009,29(3):267-273.
[2]Davis D.Precision Maneuvering and Control of the Phoenix Autonomous Underwater Vehicle for Entering a Recovery Tube[D].Master's Thesis,Naval Postgraduate School,1996.
[3]Kevin M B.Real-Time Modeling of Cross-Body Flow for Torpedo Tube Recovery of the Phoenix Autonomous Underwater Vehicle(AUV)[D].Master’s Thesis,Navel Postgraguate School,1998.
[4]Pan M L,Bong H J,Chong M L.A Docking and Control System for an Autonomous Underwater Vehicle[C]//Proceedings of the MTS/IEEE OCEANS Conference,2002:1609-1614.
[5]Pan M L,Bong H J,Sea M K.Visual Servoing for Underwater Docking of an Autonomous Underwater Vehicle with One Camera[J].Proceedings of the MTS/IEEE OCEANS Conference,2003(2):677-682.
[6]Myung H O,Jun H O.Homing and Docking Control of AUV Using Model Predictive Control[C]//Proceedings of the fifth ISOPE Pacific/Asia Offshore Mechanics Symposium,2002:138-142.
[7]Jantapremjit P,Wilson P A.Guidance-Control Based Path Following for Homing and Docking using an Autonomous Underwater Vehicle[C]//Proceedings of the MTS/IEEE OCEANS Conference,2008:1-6.
[8]Pakpong J,Philip A W.Control and Guidance for Homing and Docking Tasks using an Autonomous Underwater Vehicle[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,2007:3672-3677.
[9]Khatib O.Real-time Obstacle Avoidance for Manipulators and Mobile Robots[C]//IEEE International Conference on Robotics and Automation.St.Louis,Missouri,1990:500-505.
[10]Koren Y,Borenstein J.Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation[C]//Proceedings of the IEEE International Conference on Robotics and Automation,Sacramento,California,1991:1398-1404.
Artificial Potential Field Based on Path Planning of an AUV Docking to Submarine
GAO Jian,LIU Chang-xin,LI Yong-qiang
(School of Marine Engineering,Northwestern Polytechnical University,Xi’an 710072,China)
To meet the needs on the underwater autonomous recovery ability in the fields of military reconnaissance in the future war fighting,the horizontal autonomous docking strategy of AUV based on underwater acoustic positioning is studied.To fulfill the requirements of obstacle avoidance in the recycling process,the sliding mode control methods and the artificial potential field method are adopted,and an“added potential field”was introduced to guide the AUV step off the local minimum points.This autonomous recovery method is demonstrated suitable and effective for practical applications by the simulation studies with the REMUS AUV model.
AUV,autonomous docking,artificial potential field,local minimum points
TJ6;TP273
A
1002-0640(2015)07-0004-04
2014-05-05
2014-08-07
国家自然科学基金资助项目(51279164)
高 剑(1979- ),男,陕西西安人,副教授。研究方向:水下航行器运动控制与视觉伺服。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
诗歌月刊(2020年11期)2020-11-23
小哥白尼(趣味科学)(2020年2期)2020-06-16
北京汽车(2019年4期)2019-09-17
数学大王·低年级(2018年10期)2018-12-18
电脑爱好者(2018年13期)2018-08-05
少年文艺·开心阅读作文(2016年9期)2016-05-14