
基于AMT并联混合动力系统的CAN通信设计*
2015-06-22 15:05宋超席力克罗锐谢勇波朱田文健峰王文明
网络安全与数据管理 2015年13期
宋超,席力克,罗锐,谢勇波,朱田,文健峰,王文明
(湖南南车时代电动汽车股份有限公司,湖南株洲412007)
基于AMT并联混合动力系统的CAN通信设计*
宋超,席力克,罗锐,谢勇波,朱田,文健峰,王文明
(湖南南车时代电动汽车股份有限公司,湖南株洲412007)
针对AMT并联混合动力系统部件组成与通信性能要求,提出了一种双总线CAN拓扑结构的实时性通信解决方案。该方案构建了基于AMT控制器“路由”转发的消息系统,设计了符合TTCAN协议内容的消息时间触发机制,能够满足换档过程整车控制器、AMT控制器、电机控制器、发动机ECU之间数据通信的高实时性要求,实现整车控制器与AMT控制器命令的无缝集成,建立持续可靠的通信连接。
AMT并联混合动力;整车控制器;AMT控制器;TTCAN
0 引言
随着能源危机与环境问题的日益突出,国家对于新能源汽车产业的扶持力度逐步加大,混合动力作为新能源汽车的重要组成部分,吸引了不少企业与机构的加入。电控机械式自动变速箱(Automated Mechanical Transmission,AMT)并联混合动力以其良好的操作性与相对低廉的价格,从众多混合动力车型中脱颖而出,在多个城市得到应用。
AMT混合动力包含直连式、角传动等多种结构,直连式系统由于驱动电机位于变速箱输入侧,功率配置较大,可直接进行电机低速驱动,制动回收效果好,成本控制与经济性效应明显。
与传统AMT车辆相比,直连式混合动力系统更加复杂,变速器档位切换与离合控制过程涉及的部件更多,需要频繁地使用整车控制器局域网络(Controller Area Network,CAN)进行通信,数据交互量大,实时性要求高。为确保整车通信安全、可靠,选择较优的网络结构设计与交互方式显得尤为重要。
1 AMT车辆结构
直连式AMT并联混合动力系统传动链同轴耦合,由发动机、电控离合器、驱动电机、AMT变速器组成,支持电机直驱、发动机直驱以及混合驱动3种工作模式。系统结构如图1所示。
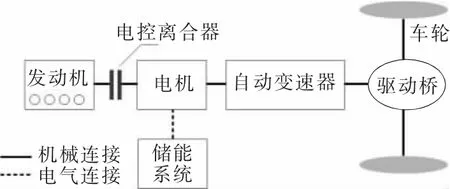
图1 AMT并联混合动力系统机电耦合结构
低速阶段,电机进行直驱;当速度上升或电压不足时,离合器结合,发动机参与驱动。整车控制器负责电机/发动机的动力分配;AMT控制器负责车辆运行过程的档位切换与离合控制。因此AMT并联系统需要构建基于整车控制器(Vehicle Control Unit,VCU)与自动变速箱控制器(Transmission Control Unit,TCU,即AMT控制器)的混合网络控制系统。
2 CAN网络设计
AMT并联混合动力系统是基于CAN总线构建的整车网络。CAN总线是一种串行多主站控制器局域网总线,具有很高的网络安全性、通信可靠性和实时性,简单实用,网络成本低,特别适用于汽车计算机控制系统和环境温度低劣、电磁辐射强和震动大的工业环境[1]。
AMT并联混合动力系统中的CAN通信设备包括整车控制器、电机控制器、发动机ECU(Electronic Control Unit,汽车专用控制器)、AMT控制器、超级电容或电池管理系统、仪表等,部分电气部件如空调、绝缘检测装置等也可能集成CAN通信功能,具体视车辆配置而定。
整车CAN网络波特率设定为250 kb/s,为避免总线负荷率过高,需要针对不同通信任务指定不同级别的通信周期。整车控制器、电机控制器、AMT控制器的通信任务影响车辆运行状态与驾驶安全,实时性要求最高;发动机ECU消息遵循SAE J1939协议;仪表主要接收数据;超级电容或电池管理系统对储能系统的运行状态进行维护,实时性要求一般,但消息数量大。
整车CAN网络设计应考虑对传统车辆CAN结构的兼容性,如发动机ECU与仪表应处于相同的通信子网。
整车控制器、AMT控制器既参与电机控制,也存在与发动机ECU的交互,为减少路由导致的消息冗余,要求通信双方处于相同子网。
根据上述原则,AMT并联混合动力系统采用CAN双网络拓扑结构,包含CANA和CANB 2个子网,如图2所示。CANA由实时性要求较高的通信设备构成,包括整车控制器、电机控制器以及AMT控制器;CANB包含传统部件如发动机ECU、仪表等,也包括通信实时性要求不高的管理系统。由于整车控制器、AMT控制器存在与发动机ECU的通信,因此也连接到CANB子网。
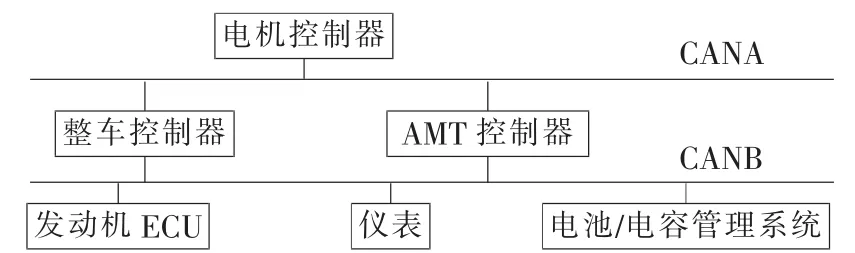
图2 整车CAN网络结构
对于AMT并联控制系统,动力性、经济性与换档平顺性是衡量车辆性能的重要指标。整车控制器根据整车电量、当前档位、部件状态等参数决定当前车辆是工作在纯电驱动模式还是并联驱动模式,不同模式下的整车需求扭矩由整车控制器根据司机踏板深度、当前档位速比进行换算,并最终由电机控制器、发动机ECU执行。
纯电驱动模式下,整车控制器建立与电机的通信连接,实现车辆加速、制动等驾驶需求;档位切换过程中,AMT控制器对变速箱前后端转速进行调节,需要短暂剥夺整车控制器对电机控制器的通信能力,以控制电机转速实现档位快速切换。这样整车控制器到电机控制器,AMT控制器到电机控制器的通信会存在“建立-断开”的过程。这种方式可以完成换档操作,但是连接状态的频繁改变,会增大通信连接的滞后时间,增加通信协议的复杂程度,也不利于通信状态的检测。为此,建立基于AMT控制器“路由”的通信方式,整车控制器到电机控制器的消息并不直接发送,而是通过AMT控制器进行地址修改与路由转发。如图3所示。如果当前没有进行换档,AMT控制器修改消息ID后直接转发消息内容;如果当前正在进行换档同步,AMT控制器修改电机工作模式为转速控制,添加目标转速等参数到消息,然后再进行发送。整个过程整车控制器到AMT控制器、AMT控制器到电机控制器的通信连接一直建立,避免通信状态的变化,提高连接过程的可靠性。
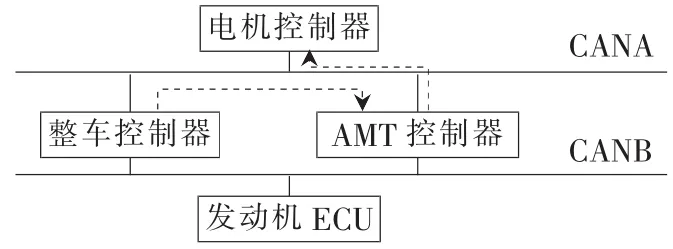
图3 换档过程整车CAN网络“路由”
并联驱动模式下,整车控制器建立与发动机ECU的通信,确保发动机工作在油门控制模式,目标扭矩通过转换成油门信号发送给ECU。换档过程中,需要进行离合控制,AMT控制器剥夺整车控制器对ECU的通信能力,控制发动机工作在转矩/转速控制模式,实现离合控制过程的调扭、转速同步等功能,因此整车控制器、AMT控制器与发动机ECU之间的通信连接也存在“建立-断开”的过程,同理也需要建立基于AMT控制器“路由”的通信方式。如图4所示,整车控制器到发动机ECU的消息由AMT控制器进行转发,离合时由AMT修改相关控制命令与参数,实现通信连接的无缝切换。
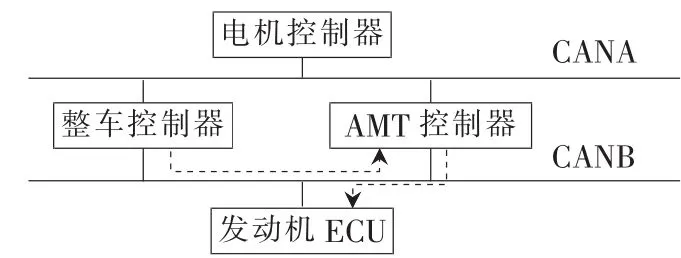
图4 离合过程整车CAN网络“路由”
3 TTCAN通信协议设计
档位切换与离合控制过程中,整车CANA网络通信实时性要求较高,AMT并联混合动力系统采用基于时间触发的TTCAN通信协议设计,可提高网络通信效率,降低总线峰值负荷,确保数据交互安全可靠。
TTCAN是建立在原有CAN协议基础之上的高层协议,对网络上所有CAN节点进行通信时序同步,并提供了全局系统时间。所有节点同步以后,任何消息都只能在特定时间段内发送,不需要与其他消息进行竞争[1]。
整车CANA网络各部件CAN通信芯片不支持TTCAN通信功能,需要制定符合TTCAN标准的通信协议矩阵,从软件层面实现通信消息的时序控制。
整车CANA网络存在的通信消息如表1所示。
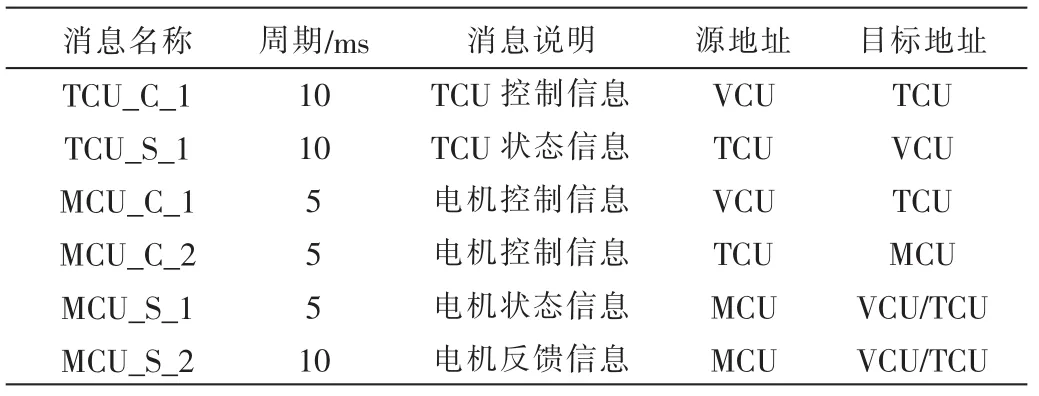
表1 整车CANA网络通信消息
整车CANA网络采用扩展消息帧格式,有29位标识符,其数据帧由7个不同的位场组成,包括帧起始、仲裁场、控制场、数据场、CRC场、应答场和帧结束。
为满足周期型消息帧的传递,采用TTCAN协议的每个独立的消息帧需要占用的最小时长w按下式计算[2-3]:

其中,ti为帧间时间间隔,取3tbit(tbit为位传输时间);tTX_EN为消息帧可触发区,取16tbit;Cj为消息帧传输时间,其计算公式为:

其中,dj为消息帧的数据场字节长度。
整车CAN网络通信速率为250 kb/s,每个消息帧传递至少需要0.6ms。以TCU_C_1为参考消息帧,基于1ms时间段建立TTCAN协议矩阵,10个时间段构成1个循环周期,所有消息帧的发送顺序和时间间隔如图5所示。
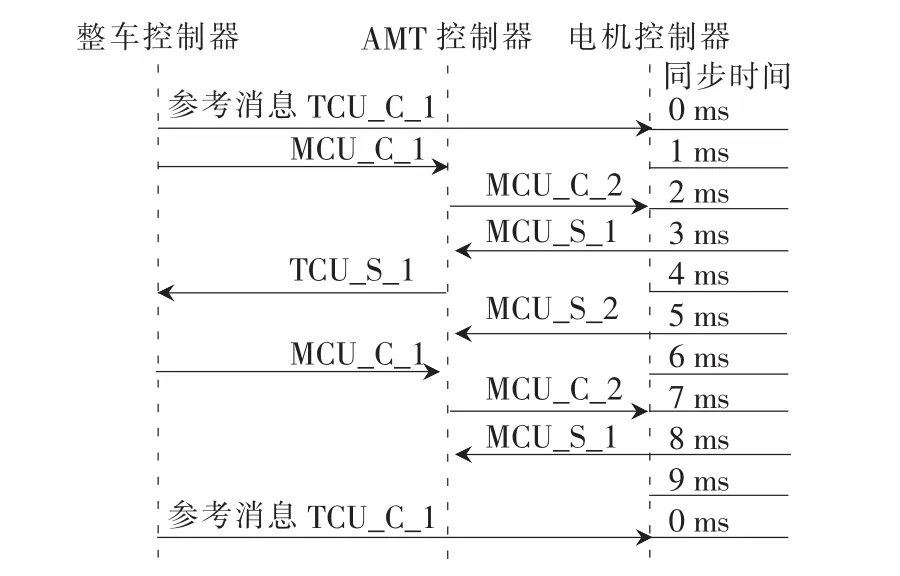
图5 CANA网络各消息帧时间触发
对于整车控制器,发送完参考消息帧后,启动时间计数,当计数周期到达时间间隔时,发送对应帧;对于电机控制器和AMT控制器,接收到整车控制器发送的参考消息帧后,启动内部定时器进行计数,当计时达到时间间隔,发送对应帧。
由于内部时钟电路的不一致性以及时钟漂移等影响,导致整车控制器、电机控制器与AMT控制器对于时间段长度的“认定”存在差别,需要进行时间单元比率的修正,修正公式如下:

式中,tref为电机控制器接收到相邻两个参考消息帧的时间间隔,tclock为电机控制器按照其时钟定义计算的单个时间段长度。AMT控制器时间单元比率计算类似。
电机控制器、AMT控制器需要设置同步失效时间:
如果电机控制器、AMT控制器超出此时间长度仍未检测到参考消息帧,则退出TTCAN协议;如果后续接收到有效的参考消息帧,则自动切换至TTCAN协议发送。电机控制器、AMT控制器的详细处理流程如图6。
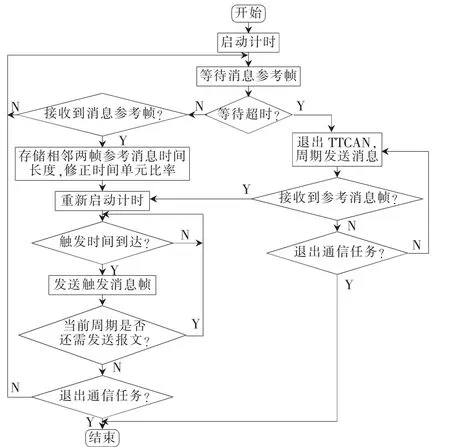
图6 TTCAN消息处理机制
4 应用实例
基于AMT并联混合动力系统进行通信连接与可靠性测试,采集档位切换与离合控制过程电机、发动机转速/扭矩等相关信息,绘制如图7所示曲线。
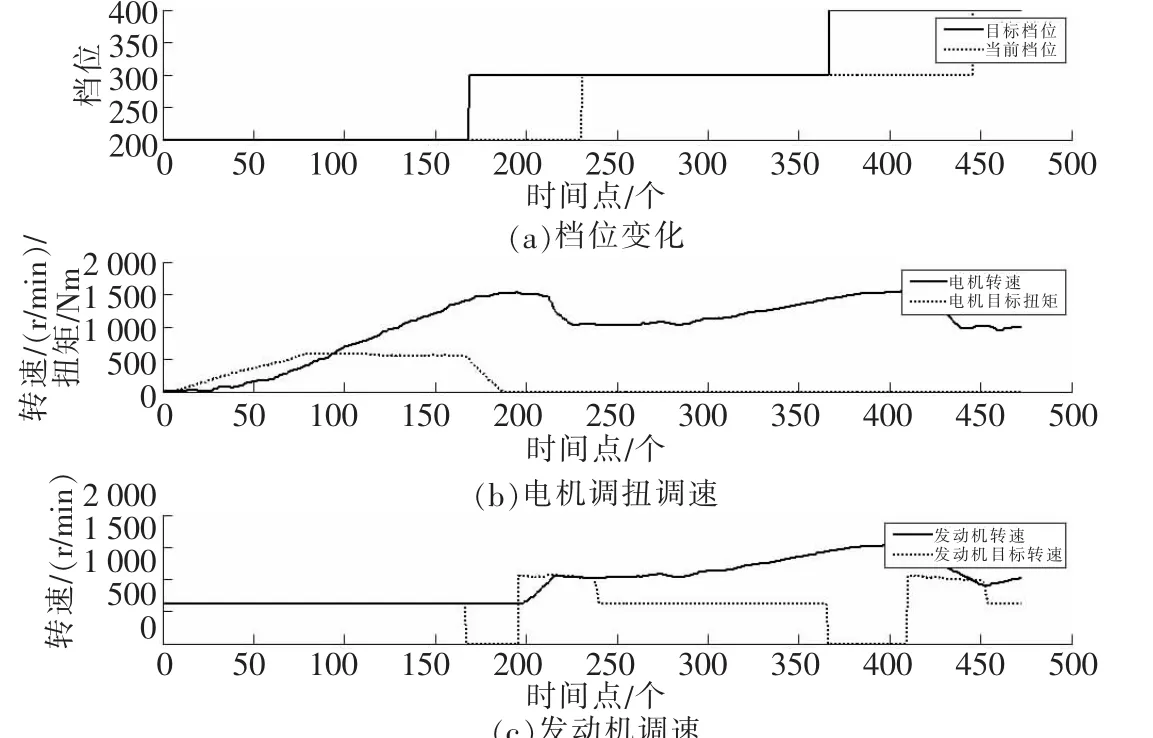
图7 AMT并联混合动力客车换档过程
此时AMT并联混合动力客车处于并联工作模式。由图7可知,档位切换过程中,AMT控制器获得电机控制权限,电机不再响应整车控制器发送的目标扭矩命令,AMT控制器控制电机降扭、同步转速;离合控制过程中,AMT控制器获得发动机控制权限,发动机不再响应整车控制器油门命令,发动机ECU工作在转速控制模式,响应AMT控制器发送的目标转速,实际转速逐步逼近目标转速,当两转速差达到结合条件,离合器执行结合动作,换档过程全部完成。整个过程电机、发动机实现了对整车控制器、AMT控制器命令切换的无缝响应。通过对比CANA实际通信数据,发现各消息帧发送有序、时间间隔固定,满足TTCAN协议矩阵的设计内容。
5 结论
基于AMT并联控制系统的CAN通信设计采用双网络拓扑结构,根据通信数据实时性要求划分子网,在兼容传统CAN网络拓扑的基础上,实现电动总成批量数据的高速、可靠传递。
档位切换与离合控制过程,针对电机、发动机转速/转矩精准控制与快速响应的要求,建立基于AMT控制器的消息路由机制,确保数据直接、高效传递,通信连接无缝切换。
针对实时通信子网CANA采用时间触发式TTCAN协议设计,制定固定时序的消息发送策略,实行连接异常出现后的同步失效控制,确保网络通信可靠、灵活。参考文献
[1]罗峰,孙泽昌.汽车CAN总线系统原理设计与应用[M].北京:电子工业出版社,2010.
[2]林凯,罗禹贡,李克强.混合动力电动车TTCAN网络系统设计[J].微计算机信息,2007,23(32):267-268.
[3]孙国良,耿庆波,李保奎.TTCAN在分布式客房控制系统中的应用[J].控制工程,2010,17(9):49-51.
The CAN communication design based on AMT parallel hybrid system
Song Chao,Xi Like,Luo Rui,Xie Yongbo,Zhu Tian,Wen Jianfeng,Wang Wenming
(Hunan CSR Times Electric Vehicle Co.,Ltd.,Zhuzhou 412007,China)
For AMT parallel hybrid system components and communication performance,a real-time communication solution based on two CAN bus topology structure is proposed.In this solution,the message system based on TCU is constructed,and the message time trigger mechanism which meets the TTCAN protocol content is designed.Finally,the data communication high realtime requirement among VCU,TCU,MCU and ECU is satisfied.The control command integration between VCU and TCU is achieved,and the reliable communication is established.
AMT parallel hybrid system;VCU;TCU;TTCAN
TP273.5
A
1674-7720(2015)13-0059-03
2015-02-02)
宋超(1987-),通信作者,男,硕士,中级工程师,主要研究方向:动力系统匹配与整车控制软件开发。E-mail:songchao2@csrzic.com。
国家高技术研究发展计划(863计划)(2011AA11A209)
席力克(1972-),男,硕士,高级工程师,主要研究方向:混合动力与纯电动车型开发。
罗锐(1987-),男,硕士,初级工程师,主要研究方向:整车控制软件开发。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
铁路通信信号工程技术(2014年5期)2014-02-28
