
基于PCS7的Smith-模糊PID控制器设计与应用
2015-06-15 06:06:26单长考韦强余
常熟理工学院学报 2015年4期
单长考,韦强余
(常熟理工学院 电气与自动化工程学院,江苏 常熟 215500)
在工业生产过程中,列管换热器是不可缺少的换热设备,它的物料出口温度的控制,是充分利用二次能源,保证节能的关键.对列管换热器出口温度变化动态曲线特性的分析表明,其具有时滞、时变、非线性等特性[1].列管换热器温度系统时滞环节的存在,使被调节量不能及时反映系统的扰动或系统的输入信号变化,会造成系统控制不稳定,影响控制效果,同时换热器在不同负荷时,出口温度的时间常数均不相同,这使得列管换热器系统出口温度的控制更加复杂.采用传统的PID控制,系统的鲁棒性较差,难以满足实际的控制要求,因此需要采用具有较强自适应能力的控制算法进行控制.
1 列管换热器出口温度控制系统概述
列管换热器出口物料温度主要是受冷凝水流量的影响,即冷凝水管线调节阀开度越大,则减温器温度就越低.所以选取冷凝水管线调节阀为执行机构实现对列管换热器出口物料温度的单回路控制,结构图如图1所示.
在单回路结构基础上采用改进的Smith预估补偿控制方法[2],克服系统大延迟、模型不精确的不良影响,提高控制系统稳定性.
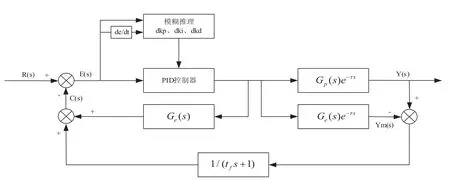
图1 列管换热器出口温度控制系统框图
PID控制是以被控对象工作点的模型为控制基础,在时变、非线性系统中很难达到理想的控制效果.模糊控制因其控制的理论依据是生产实践的经验,而非被控对象模型,因此,模糊控制在非线性、时变系统中得到了广泛的使用.针对列管换热器的对象特性采用模糊PID作为系统主控制器,发挥传统PID与模糊控制结合的优势,可以提高换热器出口温度的控制效果.
2 Smith-模糊PID控制器的设计
2.1 模糊PID控制原理
模糊PID算法实现传统PID控制参数的实时在线调整[3],根据PID控制原理及系统的动态特性,采用偏差e和偏差变化率de为模糊PID控制器输入变量,dkp、dki、dkd为输出变量.
(1)各变量论域、模糊集、隶属度函数的确立
根据输入、输出变量的变化范围和实时值,确定量化因子、模糊隶属度.选取e、de、dkp、dki、dkd的量化论域为:{一 6,一 5,一 4,一 3,一 2,一 1,0,1,2,3,4,5,6};选取 e、de、dkp、dki、dkd对应的模糊集为:{NB、NM、NS、ZO、PS、PM、PB},分别代表负大、负中、负小、零、正小、正中、正大. 采用三角形隶属函数作为e、de、dkp、dki、dkd的隶属函数.
(2)制定模糊控制规则表,常规PID对系统具有以下控制规律:
a.|e|较大,应取较大的Kp加快系统的响应;同时去掉积分作用防止积分饱和.
b.|e|中等大小,适当减小Kp并引入积分,减小系统的超调;微分作用根据ec,取较小的值.
c.|e|比较小,取适中Kp、较大的Ki和适宜Kd减小系统的稳态误差并提高抗干扰性.
根据以上PID控制规律制定模糊PID控制规则表,如表1所示.
(3)模糊推理及反模糊化
偏差e及偏差变化率ec的论域为[-6,6],故有13×13条模糊规则语句,规则前件及规则蕴涵均采用“取小”操作运算,得到模糊语言值隶属度.采用中心值平均法进行反模糊化运算,制定模糊PID控制器离线控制表.通过在线查表,将查表结果乘以比例因子,即得到控制器输出值.
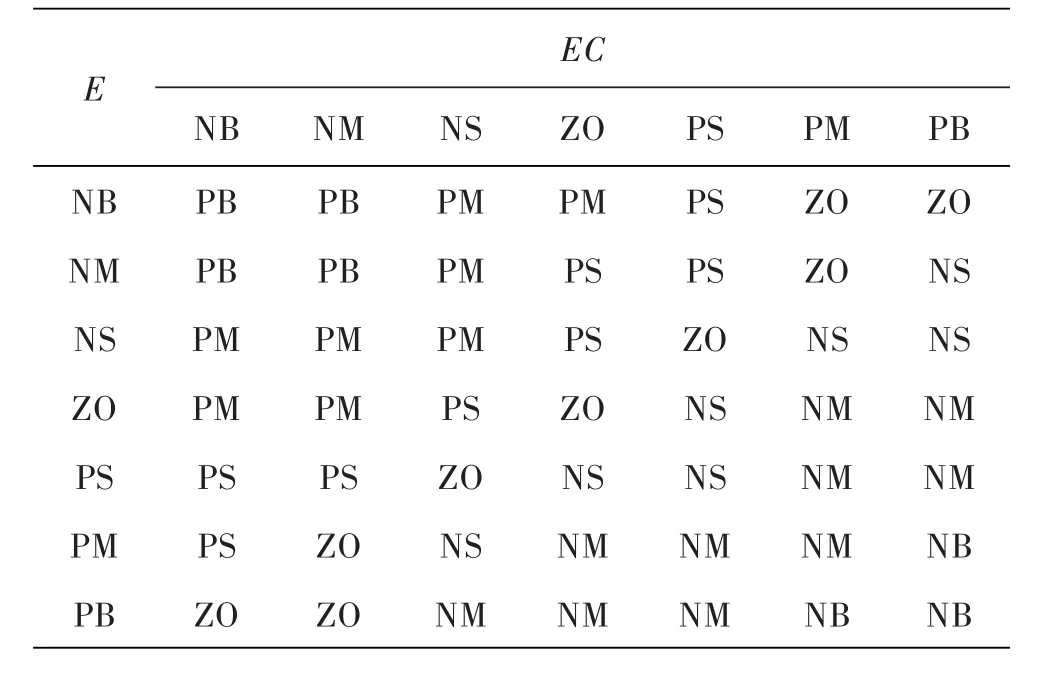
表1 △Kp模糊控制规则表
2.2 Smith预估控制及其补偿原理
Smith预估控制将被控对象的纯滞后部分与线性部分分开,这样仅使得控制过程推迟τ时间,从而消除了过程滞后的影响,提高控制系统动态性能.但其依赖精确的对象模型,这在实际工业控制过程中较难实现.改进的Smith预估补偿控制可以克服对象模型不精确的缺点,其控制框图如图2所示.
主控制器为PID控制器,传递函数为 Gc(s),Gp(s)e-τs为被控对象的传递函数,τ为纯滞后时间,Ge(s)e-τs为被控对象辨识模型.在常规Smith补偿控制的反馈通道上增加一个一阶惯性环节,通常令tf=τ,该惯性环节对系统辨识模型输出Ym(S)与被控对象实际输出Y(s)的误差进行滤波,再反馈到PID控制器,消除了模型辨识不精确的影响,提高了系统稳定性.

图2 改进的Smith预估控制框图
3 Smith-模糊PID控制器实现
3.1 系统模型辨识及离散化
本文利用WinCC数据库管理功能,将工业现场的生产数据归档、整理以备系统模型辨识使用,由列管换热器动态特性分析可知其为高阶复杂的温控对象,选择二阶加纯滞后模型来近似描述列管换热器温控的动态特性,其传递函数可假设为:
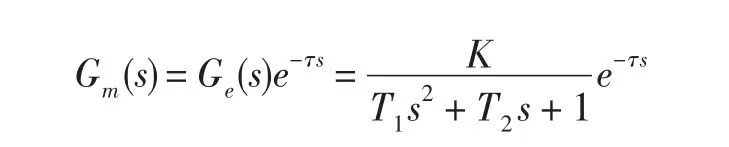
K为放大增益,τ为滞后时间,T1和T2分别为对象模型的时间常数.
采用精度较高的最小二乘法辨识模型结构中的参数值K、τ、T1、T2,并采用后向差分法近似离散化二阶加纯滞后对象模型,得到其差分方程如下,其中T为采样周期:

3.2 模糊PID程序设计
SCL是PCS7中类PASCAL高级语言,它可以实现优化过程的复杂算法编程任务[4].模糊PID控制器的SCL程序由四部分组成——实时输入变量模糊化、模糊推理、去模糊化、功能块实时输出.
(1)功能块初始化及属性定义
SCL功能块属性在功能块开始语句之后定义系统属性,根据用户自定义需要添加[5].
(2)控制器输入、输出变量定义及模糊化处理
输入变量偏差e和偏差变化率de的论域[-6,6]被分为13个等级,将论域加一个偏移量6转化为[0,12].通过设置量化因子ke、kde改变控制器计算范围,提高FB功能块的通用性和精确性.
ER_C:=rk-ek;
de:=(ER_C-e1)/T;
ie:=ER_C*T+ie;
ERCC:=ER_C;
DEE:=de;
ec1:=ROUND(ke*ERCC+6);
dec1:=ROUND(kde*DEE+6);
(3)在线查询控制表及实时控制输出
采用Matlab编写模糊PID控制器伪码程序实现模糊推理并制定离线控制表[6].模糊化后的偏差ERCC和偏差变化率DEE偏移6转化为[0,12],在已制定的模糊PID控制表中按址查询,得到相应的模糊值dkp/dki/dkd.将得到的模糊值dkp/dki/dkd解模糊后,调用PID控制算法计算[7].
kp0:ARRAY[1..13,1..13]OF REAL;
FOR i:=0 TO 12 BY 1 DO
IF i=ec1 THEN
kpk:=kp+kp_p*kp0[i,j];
END_IF;
END_FOR;
uk:=kpk*ER_C+kik*de+kdk*ie;
………………………
编译SCL源程序,生成CFC功能块.使用时在pcs7中通过CFC调用.
4 模糊PID-Smith控制器的工程应用
本文以SMPT-1000半实物仿真平台上的列管换热器为被控对象,验证设计的Smith-模糊PID控制器控制效果.阀门FV1103控制锅炉上水量,冷水进入减温器E1101预热,同时对高温过热蒸汽温度进行调节,使其符合工艺生产要求,阀门FV1105控制过热蒸汽流量负荷,E1101的PI&D图见图3.
首先进行列管换热器出口温度的模型预估,初始状态FV1103开度0%,FV1105开度30%,过热蒸汽温度为200℃,设置FV1103为10%,计算预估模型的参数得到E1101出口温度模型为:

图3 列管换热器PI&D图

在PCS7中实现组态并投运测试Smith-模糊PID控制器控制效果,分别进行如下实验测试:
1.系统初始状态:冷凝水阀门开度0%,热物料出口阀门开度30%,热物料出口温度为200℃,热物料在图3中为过热蒸汽.
2.系统投运自动模式:系统初始化稳定后,设定列管换热器出口温度为150℃.
3.系统抗扰动测试:
①当出口温度稳定在150℃后,在128秒时刻,在锅炉上水阀门FV1103施加10%的阶跃扰动,出口温度响应曲线见图4.
②当出口温度稳定在150℃后,在130秒时刻,在换热器热物料负荷控制阀门FV1105施加换热器热物料出口流量10%的阶跃扰动,出口温度响应曲线见图5.
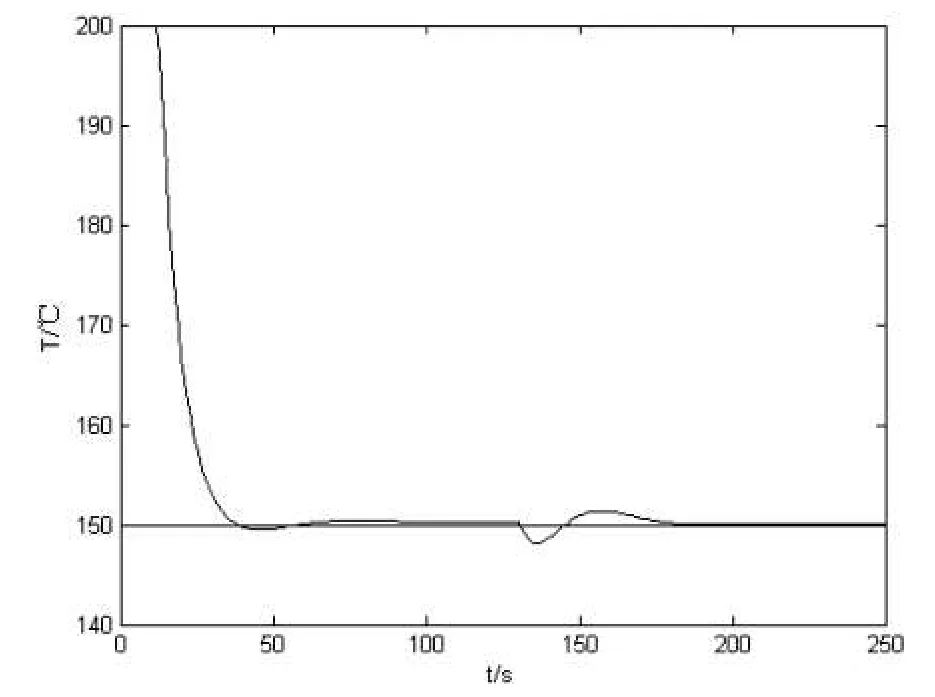
图4 冷凝水阀门10%脉冲扰动

图5换热器热物料出口阀门增大10%的阶跃扰动
控制效果分析:采用Smith-模糊PID控制器时,系统的动态指标得到明显改善:调节时间、上升时间更短;当系统的时间常数T、时滞常数t变化时,系统的响应曲线形状效果较好,同时在脉冲扰动、持续扰动作用下,其动态性能与PID控制相比,有较好的抗干扰性能.
5 结束语
设计了列管换热器出口温度控制的Smith-模糊PID控制器,并采用SCL编程开发该控制器功能块,在SMPT-1000高级多功能过程控制实训平台上进行测试,取得了良好的控制效果.本文所得结果可以为模糊控制与Smith预估补偿算法应用到控制工业实际过程中提供一定的参考.
[1]马昕,王平,李文博,等.基于PCS7的内模控制器设计与应用[J].计算机测量与控制,2010,18(10).
[2]李静.基于遗传算法优化的模糊Smith控制方法的研究[D].桂林:桂林理工大学,2011.
[3]席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008:90-91.
[4]Siemens A G.SIMATIC S7-SCL V5.3 for S7-300/400 Manual[M].北京:SIEMNS公司,2008:1-10.
[5]姜建芳.西门子S7-300/400 PLC工程应用技术[M].北京:机械工程出版社,2012:450-452.
[6]刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社,2011:288-295.
[7]王宏斌,赵曙光,顾炯.基于SCL的模糊自适应PID功能块的开发及应用[J].工业控制计算机,2012,25(2).
猜你喜欢
云南警官学院学报(2024年1期)2024-05-31 19:51:19
设备管理与维修(2018年17期)2018-03-12 01:15:58
科技与创新(2017年14期)2017-08-09 15:16:16
方圆(2017年8期)2017-05-04 14:21:41
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
中国氯碱(2015年9期)2015-11-02 01:03:41
电源技术(2015年11期)2015-08-22 08:50:38
中国锰业(2015年2期)2015-01-26 13:05:22
