
被动箝位大行程直线压电驱动器的设计
2015-06-13 07:30曲建俊郭文峰
吉林大学学报(工学版) 2015年4期
曲建俊,郭文峰,李 将,刘 畅
(哈尔滨工业大学 机电工程学院,哈尔滨150001)
0 引 言
随着压电驱动技术的快速发展,蠕动式直线压电驱动器在精密测量、精密加工以及精确定位等领域得到了广泛的应用[1-3]。其特点是响应速度快、运行速度低、单步输出位移小、输出力较大、结构简单和操控方便。目前,根据箝位体箝位方式可分为主动箝位驱动器和被动箝位驱动器。
近几年,国内外在蠕动式直线压电驱动器方面研究较多。我国主要集中在吉林大学、南京航空航天大学、清华大学、天津大学和哈尔滨工业大学[4-12]。压电驱动器结构形式较多,主要分为内驱式[5-6,9-12]和 外 驱 式[4,7-8]两 大 类,但 多 数 为 主 动箝位的工作方式,其特点是在通电状态下箝位体对导轨箝位锁紧,断电时对导轨放松。国外的研究则主要集中在日本、美国、加拿大和瑞士等国家[13-16]。相对于主动箝位压电驱动器研究成果,被动箝位式蠕动直线压电驱动器研究成果相对较少,且多数为内箝位工作方式,如吉林大学研制的内箝位步进式压电驱动器通过箝位体和驱动体与轨道之间的摩擦力的不同,实现驱动器的运动[6];南京航空航天大学研制的多足箝位式压电直线驱动器通过增加两个箝位单元,实现箝位体任意时刻均与导轨处于接触状态[10]。2005年,加拿大学者研制了一款圆柱形被动箝位式外箝位压电驱动器,其箝位体采用了三角放大结构,并将其应用于结构形变控制[16]。
本文利用被动箝位原理,设计了一台大行程、速度低的非谐振蠕动直线型压电驱动器,利用ANASY 仿真软件研究了驱动体、箝位体、三角放大铰和预紧柔性体等部件的结构设计,确定出电机的结构尺寸,测试了驱动器的空载和负载等性能,验证了其原理的可行性。该驱动器可以实现断电自锁,适用于行程大、精密直线驱动的工作环境。
1 驱动器结构及工作原理
1.1 驱动器整体结构
蠕动式箝位压电直线驱动器的工作原理是通过两个箝位体和一个驱动体三者之间在一定的信号时序控制下实现电机的直线驱动。本文研制的压电驱动器同样由驱动箝位体、保持箝位体和驱动体组成,整体结构如图1所示。
1.2 箝位体结构
箝位体分为驱动箝位体和保持箝位体,两者结构相同,分别对导轨进行箝位和放松,并配合驱动体伸缩实现导轨直线运动,结构如图2 所示。箝位原理是采用上下两组具有三角放大功能的对称结构实现对导轨的箝位。当箝位压电叠堆通电伸长时,该结构将压电叠堆的水平位移转换为箝位头的垂直位移,实现对导轨的放松;断电时,箝位体在自身弹性力的作用下恢复对导轨的箝位。
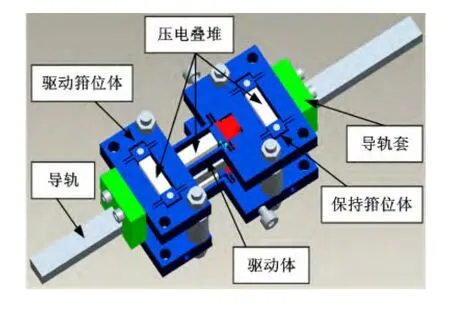
图1 驱动器整体结构Fig.1 Whole structure of piezoelectric driver
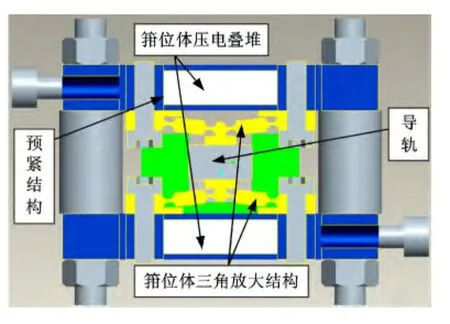
图2 箝位体结构Fig.2 Structure of clamping
1.3 驱动器工作原理
本文研究的被动箝位压电驱动器的工作原理如图3所示。
由图3可见,设计的驱动器与主动箝位式驱动器箝位原理相反。驱动器装配时,箝位体预先给导轨施加一定的预紧力。工作时,箝位体压电叠堆通电。
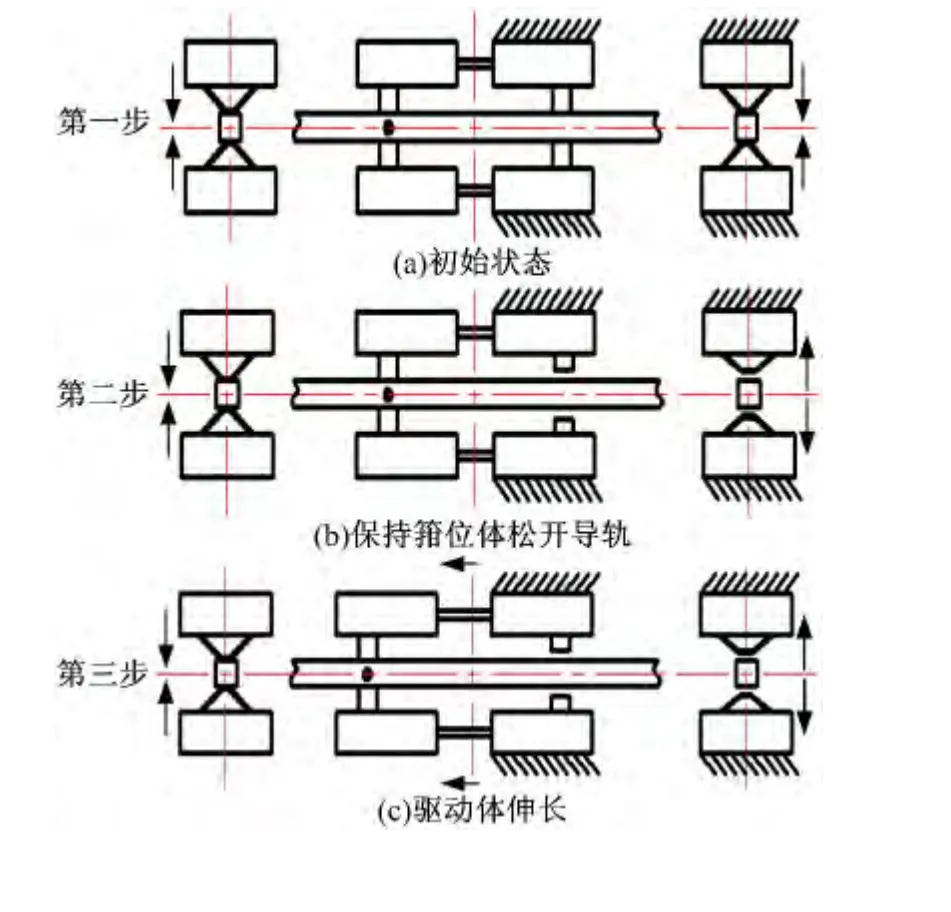
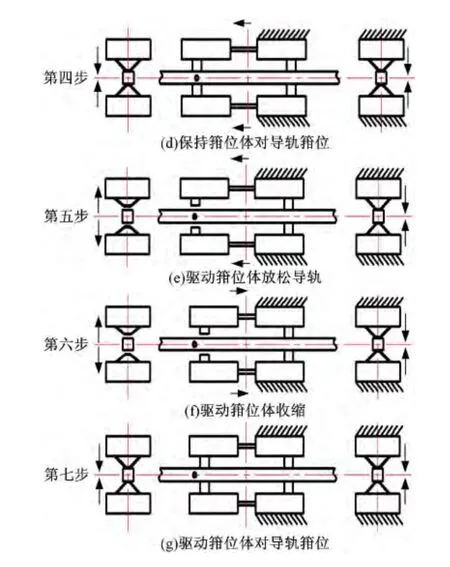
图3 驱动器工作原理Fig.3 Working principle of piezoelectric driver
2 驱动器主要结构设计
2.1 驱动体设计
驱动体采用具有矩形截面的薄壁结构,其结构简图如图4所示,其优点在于结构简单、加工方便,等效拉伸刚度容易确定。
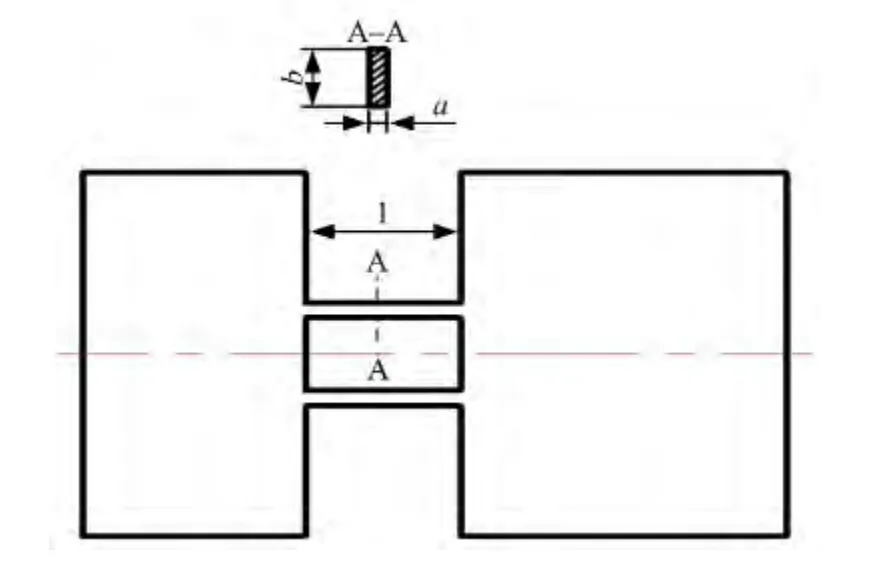
图4 驱动体结构简图Fig.4 Structure of extension body
驱动器选用哈尔滨芯明天公司销售的压电叠堆,型号为PSt 150/5×5/20,其结构尺寸为5 mm×5mm×18mm,额定电压为150V,标称位移为20μm,等效刚度为60N/μm。设计的驱动体厚度a=0.5 mm,高度b=8 mm,长度为18 mm。
根据设计尺寸,利用ANSYS软件对驱动体结构进行等效拉伸刚度和固有频率的仿真计算。通过不同载荷的仿真分析得出,驱动体等效刚度为31.2×106N/m,纵振固有频率为5000Hz。
2.2 箝位体设计
驱动器箝位体结构如图2所示,其结构采用了三角放大原理。由于压电叠堆的输出位移为微米级,若采用直接箝位的方式对导轨箝位和放松,箝位体对导轨的释放间隙量较小或不能完全放松。因此,本文所设计的驱动器箝位体采用了三角放大结构,以此来提高箝位压电叠堆的输出位移,增加箝位体释放间隙。
三角放大结构每侧由两个半圆形直圆柔性铰链构成,通过柔性铰链形变实现压电叠堆输出位移的转化和放大。其结构简单,易于机械加工。具体结构参数如图5所示。图5为左侧半个三角放大结构的示意图。
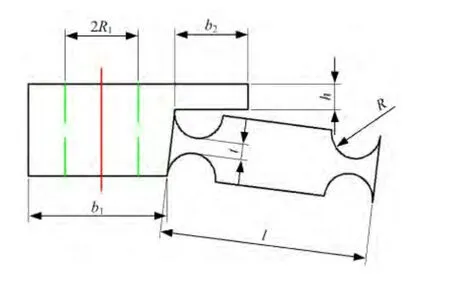
图5 箝位体三角臂尺寸参数Fig.5 Dimension parameter of triangulation amplifier
根据三角放大结构的放大原理,放大倍数由三角臂与水平轴的夹角α 决定,其放大关系为[17]:

式中:y 为三角放大结构垂直方向运动的距离;x为三角放大结构单侧水平方向运动的距离。
本文设计的箝位体位移放大倍数的理论值为4,即y/(2x)=4,此时的三角臂与水平轴的夹角α=7°。图6为水平方向加载位移载荷,使三角放大结构产生19μm 位移时箝位头垂直方向的位移云图。
在确定三角放大倍数的基础上,固有频率为箝位体结构设计的另一个主要参数。根据驱动器工作原理可知,若要满足驱动器正常运行,箝位体固有频率与驱动体固有频率应满足以下关系:即箝位体固有频率应大于等于驱动体固有频率,以满足箝位体对导轨及时地放松和箝位。

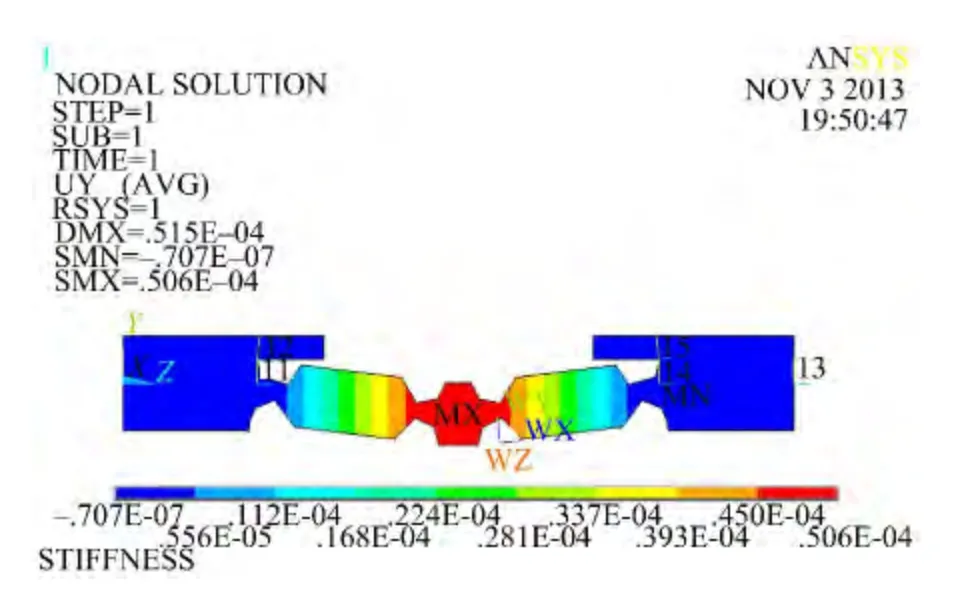
图6 三角放大结构水平和垂直位移云图Fig.6 Vertical displacement of triangulation amplifier
利用ANSYS多次仿真计算可得,当直圆柔性铰链厚度t=0.6mm,半径R=1mm 时,其响应频率为8888Hz,远大于驱动体响应频率5000 Hz。因此,该结构尺寸可以满足驱动器运行的基本要求。
2.3 箝位压电叠堆预紧柔性体设计
箝位压电叠堆预紧柔性体结构简图如图7所示。其结构可简化为中间具有集中质量,两端为固定端支撑结构。通过柔性体弹性变形作用实现对箝位压电叠堆的预紧和定位,同时起到保护压电叠堆,避免其承受弯曲载荷的作用。
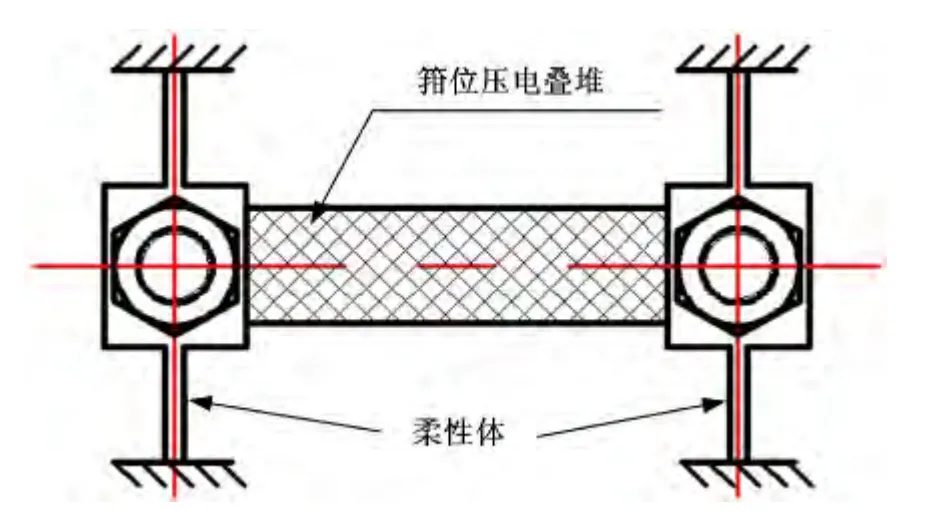
图7 箝位压电叠堆预紧结构Fig.7 Structure of preloading clamping PZT
通过改变柔性体厚度和长度,并利用ANSYS进行多次仿真计算得出,当厚度为0.7 mm,长度为5 mm 时,其动态响应频率为8785 Hz,远大于驱动体响应频率,满足驱动器的运行要求。
3 实验结果与讨论
3.1 驱动器制作
驱动器驱动体和箝位体结构均采用7075硬铝合金材料,并利用线切割加工制作而成。加工装配后的驱动器原理样机如图8所示。
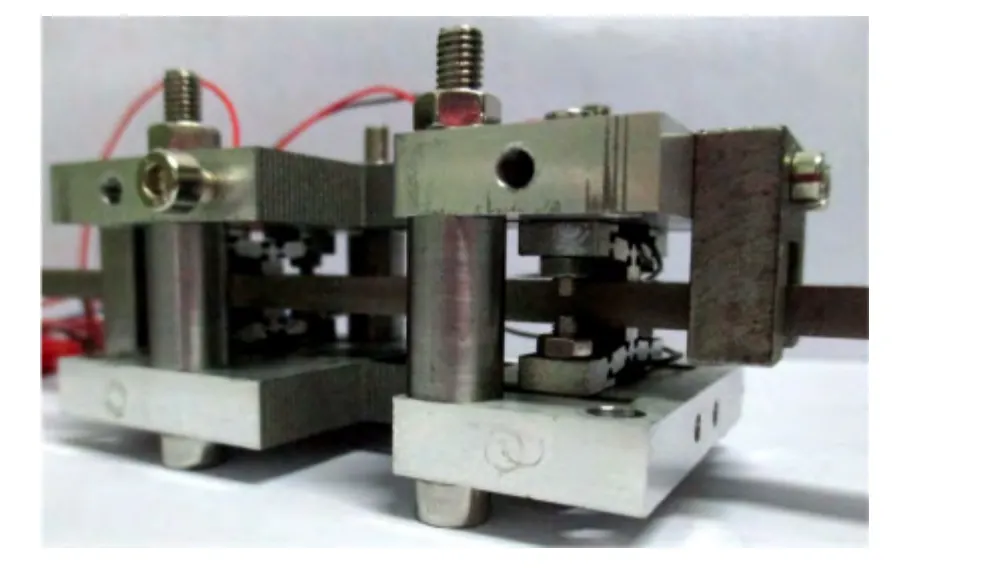
图8 驱动器原理样机Fig.8 Prototype of driver
硬铝合金的优点在于强度高、弹性模量小,驱动体和箝位体等效刚度小,压电叠堆在其弹性负载作用下输出位移较大,最大限度地减小压电叠堆输出位移的损失。
3.2 实验系统
驱动器实验系统如图9所示。该实验系统可以测量驱动器空载以及不同负载下的驱动器性能。驱动器电源由哈尔滨芯明天公司生产,其型号为XE-501,其输出电压为0~150V。驱动器输出位移测试传感器采用基恩士公司生产的LKG 系列的高速、高精确CCD 激光位移传感器,其精确测量位移值为0.1μm。
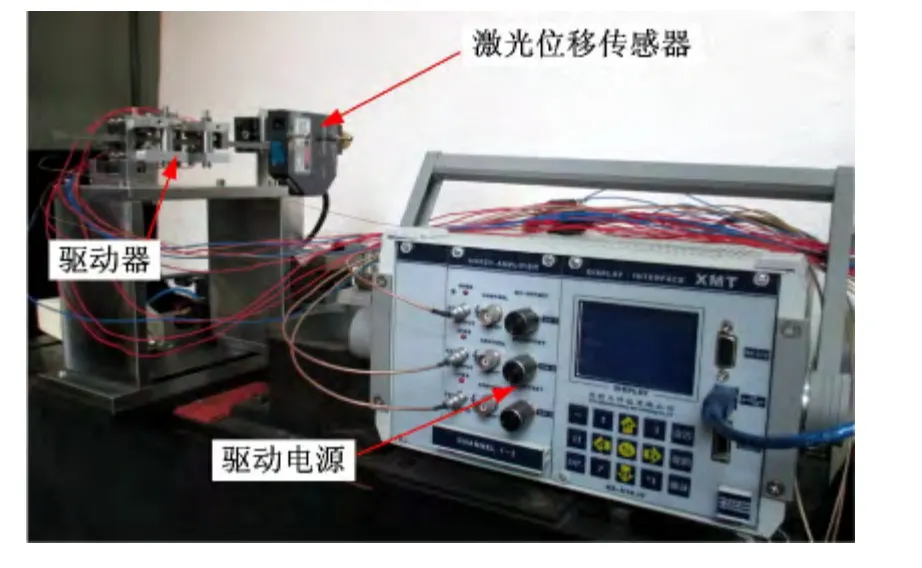
图9 驱动器实验系统Fig.9 Experimental testing system of driver
3.3 驱动器空载特性
驱动器在150V 额定驱动电压下,空载特性如图10所示。驱动器空载运行速度随驱动频率的增大先增大后减小。当驱动频率为70Hz时达到最大值,其值为0.43mm/s。
理想工作状态下,驱动器运行速度与驱动频率和单步位移的关系为:

式中:v为驱动器运行速度;L0为驱动体单步输出位移。
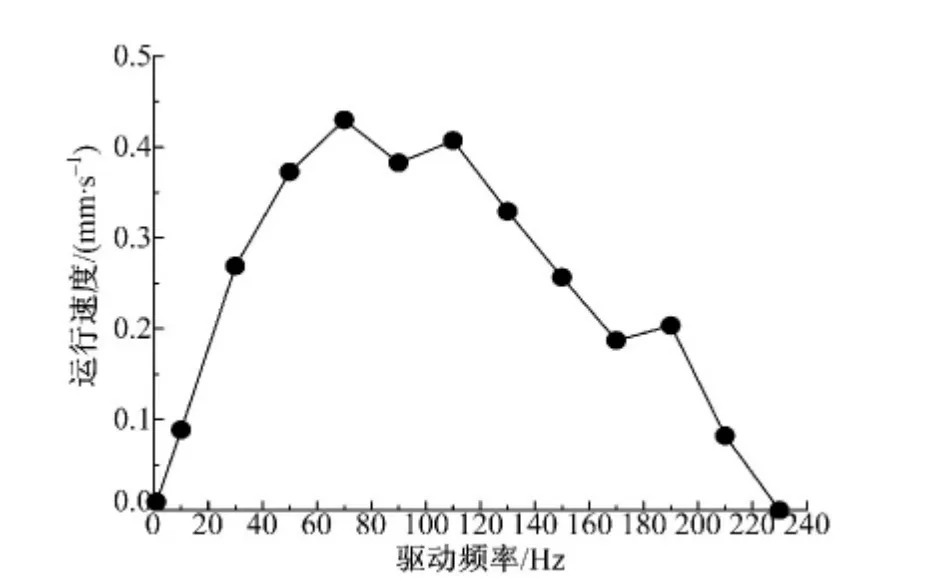
图10 驱动器空载特性Fig.10 No load characteristic of driver
实际运行状态是驱动频率大于一定值后,驱动器运行速度开始下降。分析产生此工作状态的原因是由于金属材料存在阻尼,导致驱动体动态响应频率较低。高频驱动时,驱动体伸缩状态不能随压电叠堆的断电复位而复位,驱动体出现振动悬浮状态,导致单步输出位移减小,驱动器速度下降。
3.4 驱动器负载特性
研究了驱动器在不同驱动频率、额定驱动电压150V 条件下的负载特性,结果表明,当驱动频率为50Hz左右时,驱动器负载特性较平稳,驱动力和空载运行速度较大,分别为2.1 N 和0.38 mm/s,如图11所示。
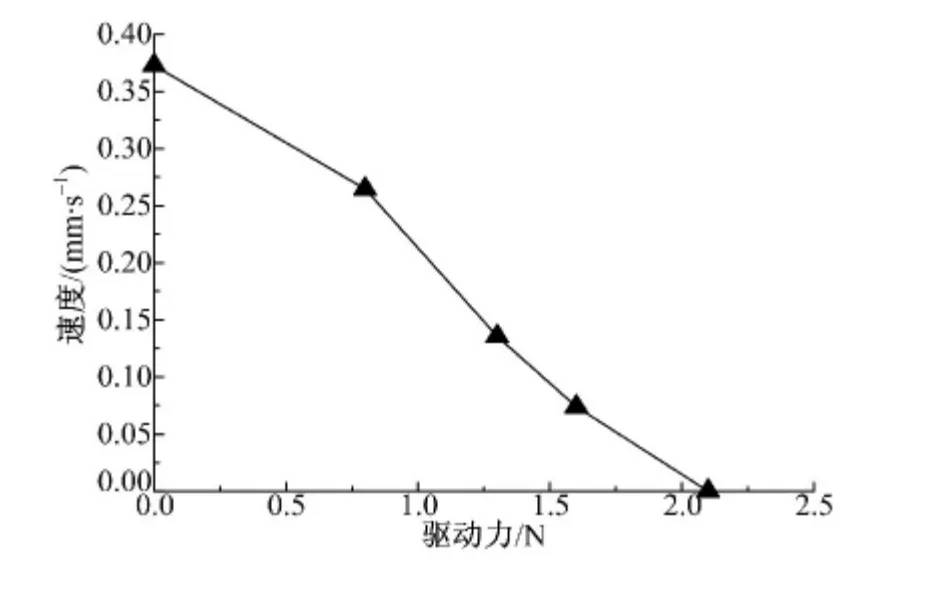
图11 50Hz频率驱动下的负载特性Fig.11 Load characteristic of driver under 50Hz
由图11可见,驱动器驱动力远小于箝位体保持力(后面章节阐述),分析导致驱动力较小的原因是由于箝位体在通电时不能实现对导轨完全放松,仍具有一定的箝位保持力,影响驱动器正常工作,导致驱动力较小。
3.5 驱动电压对驱动力的影响
在50 Hz驱动频率、0.05 mm/s 运动速度下,测试了驱动电压对驱动力的影响,结果如图12所示。
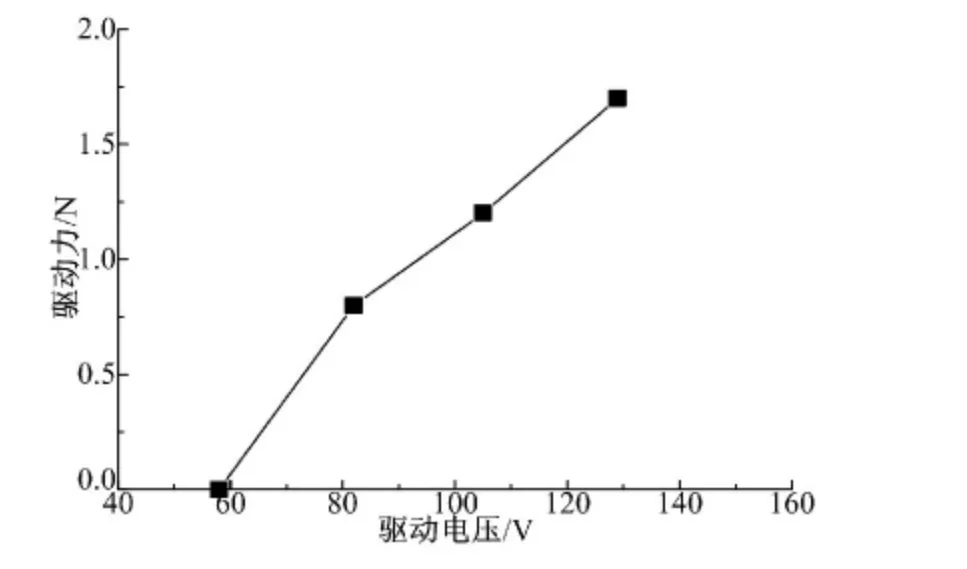
图12 驱动器驱动力与驱动电压关系Fig.12 Relationship between driving force and voltage
由图12可见,驱动力随驱动电压的增大近似线性增长。当驱动电压为58V、运动速度为0.05 mm/s时,驱动力为零。表明箝位体三角放大结构在导轨预紧力的作用下产生了一定的压缩量,箝位体压电叠堆在驱动电压较低时,水平位移量较小,不足以克服预紧压缩量,致使箝位体三角放大结构箝位头不能产生垂直方向的位移,实现对导轨的放松。
3.6 箝位体保持力
在通电和断电时,分别测试了驱动箝位和保持箝位对导轨的箝位力,测试结果如图13所示。由图可见,曲线1为保持箝位体在额定电压下,驱动箝位体电压不同时,驱动器保持箝位力的大小;曲线2表示驱动箝位体在额定电压下,保持箝位体电压不同时,驱动器保持箝位力的大小。由图13可见,驱动箝位体从断电至额定电压时,驱动器对导轨箝位力减小约2N;同理,保持箝位体从断电至额定电压时,驱动器对导轨箝位力减小约3N。上述2种情况的箝位力减小量均远小于驱动器17N 的保持箝位力。
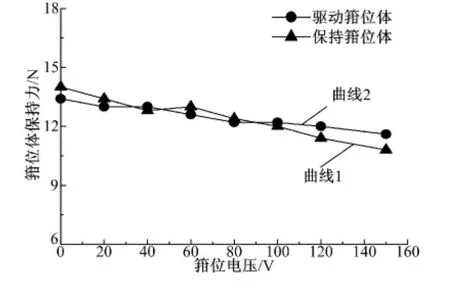
图13 箝位体保持力Fig.13 Holding force of clamping bodies
图13中结果证实了驱动箝位体和保持箝位体在通电状态下对导轨不能完全放松或放松程度较小,从而导致驱动力较小。分析产生此现象的实质是由于箝位体压电叠堆预紧柔性体的等效刚度大于三角放大结构的等效刚度。当对导轨进行预紧时,三角放大结构被压缩,产生预紧压缩现象。当箝位体压电叠堆通电伸长时,需要先克服该压缩量,然后才能实现箝位头的垂直运动。当压缩量过大时导轨不能被完全放松。因此,在下一阶段的深入研究中,应重点优化箝位体的各部分结构的等效刚度,实现各部分结构的刚度匹配,提高驱动器的驱动性能。
4 结 论
(1)研制了一款蠕动式被动箝位压电直线驱动器。驱动器箝位体采用了三角放大结构,放大箝位压电叠堆的输出位移,提高箝位体运动位移。驱动器具有断电自锁、节能以及大行程的特点,可应用在精密驱动和定位系统。
(2)驱动器在50Hz时运行比较平稳,其最大驱动力约为2.1N,空载运行速度约为0.38mm/s,在70 Hz时,空载运行速度最大,约为0.43 mm/s。
(3)驱动器具有较高的响应频率。驱动器目前驱动力较小,其值远小于导轨的保持力,主要是由于箝位体受到压缩导致其在额定电压驱动下不能对导轨完全放松,需进一步优化箝位体尺寸,实现预紧和放大的刚度匹配。此外,还应研究不同预紧状态对驱动器性能的影响。
[1]Li Jun,Zhu Zhen-qi.Design of a linear piezomotor with ultra-high stiffness and nanoprecision[J].IEEE/ASME Transactions on Mechatronics,2000,4(5):441-443.
[2]Chen Quan-fang,Yao Da-jeng,Kim Chang-jin,et al.Mesoscale actuator device:micro interlocking mechanism to transfer macro load[J].Sensors and Actuators,1999,73(1):30-36.
[3]Park J,Keller S,Carman G P,et al.Development of a compact displacement accumulation actuator device for both large force and large displacement[J].Sensors and Actuators A,2001,90(3):191-202.
[4]刘建芳.压电步进精密驱动器理论及实验研究[D].长春:吉林大学机械科学与工程学院,2005.Liu Jian-fang.Theoretical and experimental study on piezoelectric precision step actuator[D].Changchun:College of Mechanical Science and Engineering,Jilin University,2005.
[5]刘建芳,杨志刚,程光明,等.压电驱动精密直线步进电机研究[J].中国电机工程学报,2004(4):102-107.Liu Jian-fang,Yang Zhi-gang,Cheng Guang-ming,et al.A study of precision PZT line step motor[J].Proceedings of the CSEE,2004(4):102-107.
[6]张鹏.内箝位步进式压电驱动机构研究[D].长春:吉林大学机械科学与工程学院,2005.Zhang Peng.Research on theory and experiment of method of stepping driving by piezoelectric strangulated inside[D].Changchun:College of Mechanical Science and Engineering,Jilin University,2005.
[7]吕超.新型压电步进直线精密驱动器结构的研究[D].长春:吉林大学机械科学与工程学院,2006.Lv Chao.Research on a new structure of precision piezoelectric linear stepper actuator[D].Changchun:College of Mechanical Science and Engineering,Jilin University,2005.
[8]张兆成.新型压电尺蠖精密驱动器柔性机构分析与实验研究[D].哈尔滨:哈尔滨工业大学机电工程学院,2010.Zhang Zhao-cheng.Compliant mechanism analysis and experiments for a new type piezoelectric inchworm precision actuator[D].Harbin:School of Mechatronics Engineering,Harbin Institute of Technology,2010.
[9]Zhang Zhi-jun,Xu Ming-long,Feng Bo,et al.Research for a new actuator with variable step and large displacement[J].International Journal of Applied Electromagnetics and Mechanics,2010,33(1):597-604.
[10]肖文兰.尺蠖式压电步进进针机构的研究[D].天津:天津大学精密仪器与光电子工程学院,2011.Xiao Wen-lan.Study on piezoelectric inchworm-type probe-approaching stepper[D].Tianjin:College of Precision Instrument and OPTO-Electronics Engineering,Tianjin University,2011.
[11]潘雷.多足箝位式压电直线电机的研究[D].南京:南京航空航天大学航空工程学院,2012.Pan Lei.Study on multi-foot clamping piezoelectric linear motor[D].Nanjing:College of Aerospace Engineering,Nanjing University of Aeronautics and Astronautics,2012.
[12]赵宏伟,吴博达,程光明,等.高精度压电步进直线驱动器[J].吉林大学学报:工学版,2006,36(3):350-354.Zhao Hong-wei,Wu Bo-da,Cheng Guang-ming,et al.Ultra-precision piezoelectric stepping linear actuator[J].Journal of Jilin University(Engineering and Technology Edition),2006,36(3):350-354.
[13]Ferrier N,Markovic M,Perriard Y.Conception of a piezoelectric linear motor for the generation of high linear forces[C]∥International Conference on Electrical Machines and Systems(ICEMS),Beijing,2011:1-6.
[14]Itatsu Yuki,Torii Akihiro,Ueda Akiteru.Inchworm type microrobot using friction force control mechanisms[C]∥International Symposium on Micro-Nanomechatronics and Human Science,Japan,2011:273-278.
[15]Liang Yuan-chang,Taya Minoru,Xiao John Q,et al.Design of an inchworm actuator based on a ferromagnetic shape memory alloy composite[J].Smart Materials and Structures,2012,21(11):1-8.
[16]Li J,Sedaghati R,Dargahi J,et al.Design and development of a new piezoelectric linear Inchworm actuator[J].Mechatronics,2005,15(6):651-680.
[17]杜习波.基于三角放大原理的压电型精密定位机构研究[D].焦作:河南理工大学机械与动力工程学院,2009.Du Xi-bo.Study on precision positioning mechanism of piezoelectric actuator based on the principle of triangulation amplification[D].Jiaozuo:School of Mechanical and Power Engineering,Henan Polytechnic University,2009.
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
中国外汇(2019年9期)2019-07-13
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
电机与控制学报(2018年9期)2018-05-14
家庭影院技术(2018年3期)2018-05-09
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年17期)2016-04-11
通信电源技术(2016年5期)2016-03-22
火控雷达技术(2016年3期)2016-02-06
