
智能搬运机器人的设计与实现
2015-06-09 12:33刘少军王瑜瑜
机械与电子 2015年8期
刘少军,王瑜瑜
(西安航空职业技术学院,陕西西安 710089)
智能搬运机器人的设计与实现
刘少军,王瑜瑜
(西安航空职业技术学院,陕西西安 710089)
0 引言
在工业生产中,为了改善工人的劳动条件,提高劳动生产率,加快实现工业生产机械化和自动化的步伐。需要一种能够进行简单重复性劳作、花费少、效率高的机械设备,尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合这种需求更为迫切。因此,搬运机器人应运而生。搬运机器人在实际的工作中就是一个机械手,它的快速发展正是因为其积极作用和影响日渐被人们意识到。首先,它在很多场合能够替代人工作业;其次,它能够严格按照预先设定的程序,快速准确地完成工件的拆装及运输;再次,它能操作必要的机具进行焊接和装配,因而,受到很多国家的重视,投入大量的人力物力来研究和应用。所设计的搬运机器人能够自行判断物体的位置,并实现自动抓取、运送及放置的功能,实用价值较高。
1 系统的总体设计
机器人平台控制系统包括16路巡线传感器、传感器信号处理板、主控制板、电机驱动板和其他待开发扩展部件组成。
系统采用STC12C5A60S2单片机为控制中心,8通道传感器输入接口用于连接光电、接近传感器或者超声传感器等,充分利用各种传感器探测外部信息,并在自动机器人平台底部安装了16路巡线传感器,可以可靠地探测到地面白条以及白条的十字交叉点。上述信号经由单片机分析处理后,通过调速电机驱动板对可调速电机实现进行PWM控制[1],最终完成相应的工作任务。
2 机械设计
2.1 平台的机械部分
机器人平台的总体构成如图1所示。平台的机械部分是指机器人完成相应功能时所需的机械部件,主要包含主动轮、从动轮、直流电机、铝合金框架、铝板等。
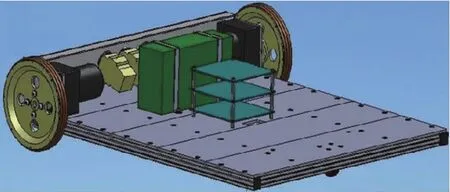
图1 自动机器人平台的总体构成
2.2 上部机构
机器人的上部机构部分是指机械手,机械手有空间直角坐标X,Y,Z轴3个方向,它能实现按一定程序去运动,完成指定的任务。每个轴上都装有定位传感器,控制机械手臂在合适的位置动作;还装有光电传感器用来识别工件颜色的,机器人装有两路光电传感器,一路是抓取工件时检测存储台工件颜色的(本课题以红色为例),另一路是放置工件时检测存储台工件颜色的,以保证正确放置工件。机械手的主要任务即就是将物体从1号存储台准确地运送至2号存储台相应的位置。
3 电气设计
3.1 主控制板
主控制板是机器人的大脑,承担着信息接收、处理、外部设备控制的重要任务,主控制板中处理器选用了STC12C5A60S2芯片为主控芯片,控制板支持2大类输入,即16通道专用巡线传感器输入和8通道传感器输入;输出也是支持2大类,即可调速行走电机控制输出和不可调速行走电机控制输出;并具有一个可扩展接口[2]。
3.1.1 8通道传感器输入接口
8通道传感器输入接口用于连接光电、接近传感器或者超声传感器等,充分利用各种传感器探测外部信息。
输入信号使用了单片机的P0.0- P0.3口,插座J8- J11分别接4个不同传感器,传感器直接使用市场现有的成熟产品,主要有红外传感器、接近传感器或超声传感器,在机器人中,主要用来探测四周是否存在障碍或者是否到达预定w位置。传感器上有3根引线,分别接J8- J11的3个引脚。需要注意的是,使用的传感器必须是NPN型,工作电压在6~36 V之间。电路均为低电平有效,即传感器探测到目标时,反相器输出端即单片机的P0.0 -P0.3脚为低电平信号,否则为高电平。
3.1.2 非调速电机输出接口
电路板上设置了8个非调速电机输出接口,可以用来控制4个正反转直流电机或者8个单向运转直流电机。P16,P17,P32- P37为8个控制信号,使用了单片机的P1.6,P1.7和P3.2- P3.7口,这些信号均是低电平有效。
3.2 巡线传感器
自动机器人平台底部安装了16路巡线传感器,可以可靠地探测到地面白条以及白条的十字交叉点。巡线传感器主要有光源发射部分、接受部分及输出插座3部分构成。其中,光源发射部分由16个高亮度的LED发射管组成;接受收部分由16个光敏电阻组成,它们能够接受地面反射回来的光线并最终将光信号转化成电信号;输出插座用来连接传感器信号处理板的巡线传感器输入接口。
3.3 传感器信号处理板
传感器信号处理板电路原理框图如图2所示。16路巡线传感器将采集到的地面白条信息送入本电路板,对于采集的信息先进行放大处理,放大后的信号跟标准电压比较,保留白条反射的有效信号,过滤掉地面背景反射信号,有效信号再通过稳压、反向、放大处理后送入单片机控制板,同时用发光二极管的亮暗指示当前某路传感器是否在地面白条上。巡线传感器输入接口连接安装在机器人平台底部的16路巡线传感器;信号输出接口连接单片机控制板,插座JP接12 V电源[3]。

图2 传感器信号处理板电路原理
3.4 颜色识别
3.4.1 检测传感器
检测工件采用一种集发射和接受于一体的光电传感器,检测距离可以根据要求进行调节。光电传感器一般由光源,光学通路和光电元件3部分组成。光电检测方法不仅精度高,反应灵敏,而且可测参数多,结构简单,检测距离远,成本低,便于安装。因此,在控制和检测领域中得到了广泛应用。
3.4.2 检测原理
光电传感器主要由2部分构成,它们分别是投光部(发射光线)和受光部(接受光线)。所采用的传感器为扩散反射型。当投光部发射的光线照射到被测物体时,反射回来的光线首先由接收电路的光敏三极管接受,将光信号变换为相应的电流信号,再经放大器放大和同步选通整型,然后用数字积分或RC积分方式排除干扰,触发驱动器输出光电开关控制信号。机器人一共装了2个光电传感器,一个是用来抓取时检测工件的位置,以便于准确取货;另外一个是放工件时检测存储台上的工件是否与机械手上的颜色一致,检测到工件时信号灯亮,否则不亮。
3.5 机械手的定位
3.5.1 定位传感器
机械手的定位是靠灰度传感器来实现的,灰度传感器有一只红外发射二极管和一只红外接收二极管,安装在同一面上。当灰度传感器工作时,首先由红外发射二极管发出白光并照射在检测面上,紧接着接收二极管会接收检测面的反射光线,并将其转换为相应电信号,检测距离可以根据要求进行调节。灰度传感器上有信号指示灯(白色灯亮黑色灯灭),还配有检测颜色返回模拟量大小调节器。欲使检测给定的颜色时,可以将发射/接收头置于给定颜色处,配合调节器即可调出合适的返回模拟量[4]。将调节器逆时针方向旋转,返回模拟量变大;将调节器顺时针方向旋转,返回模拟量变小。
3.5.2 机械手的定位方式
机械手臂上都贴有事先定好的位置,X,Y,Z轴上分别都有0,1,2号位置,0号位置为复位位置(装有限位开关),1,2号位置是黑色,其他部分都是白色,根据任务要求,机械手会按照写入的程序运动。
机械手复位时都处于空间坐标(0,0,0)位置,置位时机械手处于(0,1,0)位置,在左边检测工件时机械手处于(1,0,0)位置,在右边检测时机械手处于(1,2,0)位置,夹住工件时机械手处于(0,0,1)位置[5]。
4 系统的软件设计
4.1 搬运机器人库函数
机器人库函数件文件包含了大量的标准C语言的接口函数,它们全都部利用嵌入式C语言开发完成,为用户实行二次开发提供了便利。开发的库函数主要有:
a.Void Init ADC()。初始STC12C5A60S2所带的ADC模块的寄存器。
b.Unsigned int Light(unsigned char ch)。获取某个A/D通道的转换结果。入口参数为所要获取的A/D通道,0- 7。出口参数为所选择的A/D通道测得的转换结果。
c.void Serve Moto(unsigned int par)。舵机控制函数,控制舵机转过一定角度从而控制机械手的动作。入口参数Par取值范围为5~25,其中5~15时对应舵机反传,15~25时舵机正传。
d.void Moto(unsigned char Moto Type,int Speed Par)电机控制函数,其中Moto Type取值为1时表示对左轮发送运动命令,取值为0时表示对右轮电机发送控制命令。后面的Speed Par参数决定电机的转动速度。
e.void InitPWM()。对STC12C5A60S2的PCA模块进行初始化,使其工作在PWM模式,并对于PWM进行初始化。
f.void UartInit(void)。串口初始化函数,初始化串口1,方便通过串口调试搬运机器人。
g.void GetColor(unsigned int Color[])。进行一次颜色采集,将目标物料的各颜色分量和总量值存于Color[]数组中,其中Color[0]对应红色分量,Color[1]对应蓝色分量,Color[2]对应颜色总量。
h.void SysInit()。搬运机器人工作初始化函数,其中包含各模块的初始化函数,例如电机初始化,定时器初始化等。
4.2 系统的流程
系统的子程序模块主要包含搬运货物子程序和机械手运动子程序2部分[6]。其中搬运货物的流程图如图3所示,搬运机器人按提前设定的路径前进,直至到达指定的地点。对货物颜色进行判断后将其放入指定的区域,当运送完所有的货物后任务
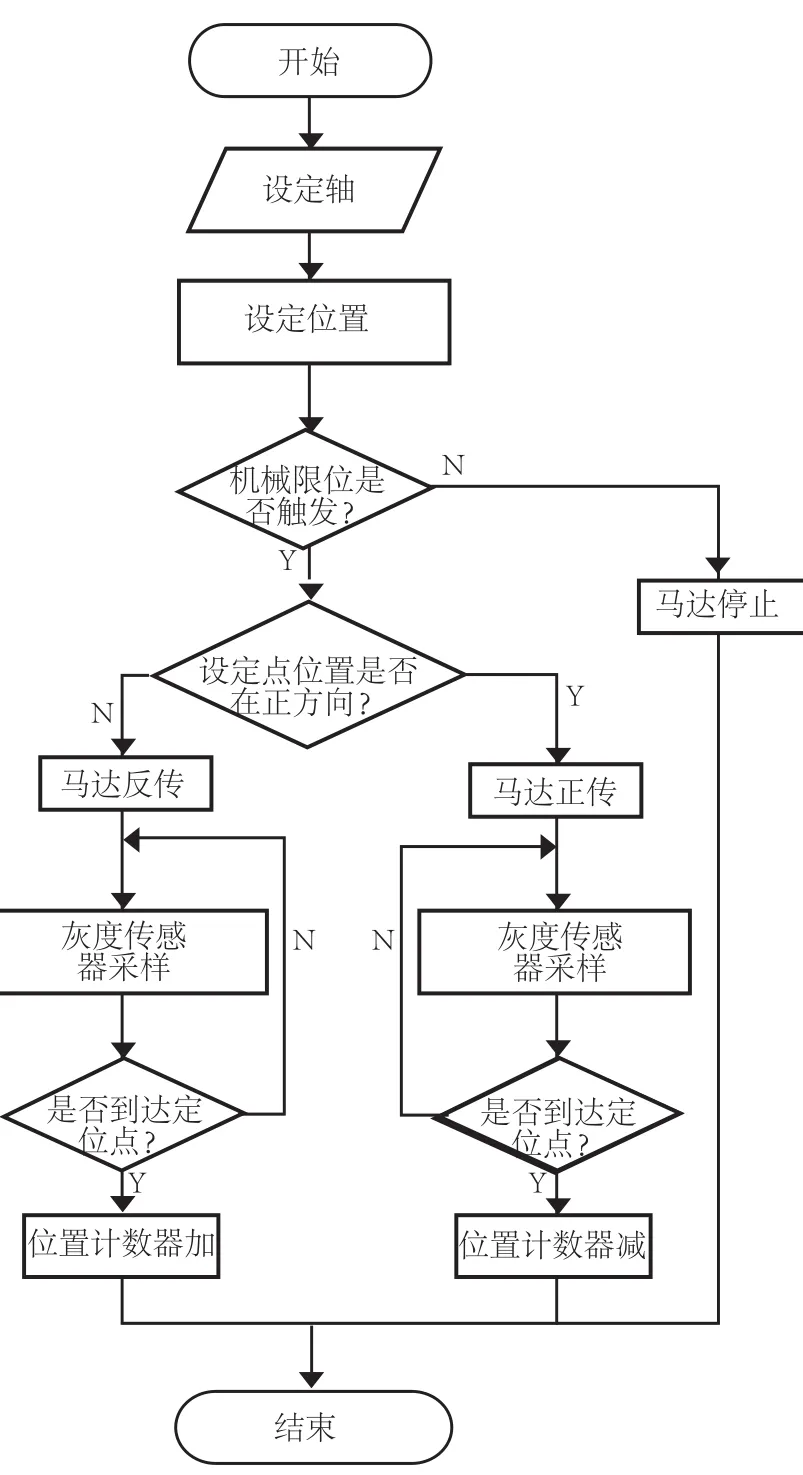
图3 搬运货物流程
5 结束语
设计的基于STC12C5A60S2单片机控制的智能搬运机器人,软硬件设计合理,扩展性强,采用通用的软件开发平台Keil u Vision3进行开发。该搬运机器人包含的检测存储模式,使得机器人能够对场地环境进行实时检测,从而提高了机器人的抗干扰能力及稳定性,具有较高的实用价值。当然系统还存在不足之处,有待进一步的完善发展。如缺少对避障策略环节的研究。若搬运机器人在运行过程中遇到障碍物时,无法绕过障碍到达目的地,而只能将货物置于临时存放区,再执行下一步动作。
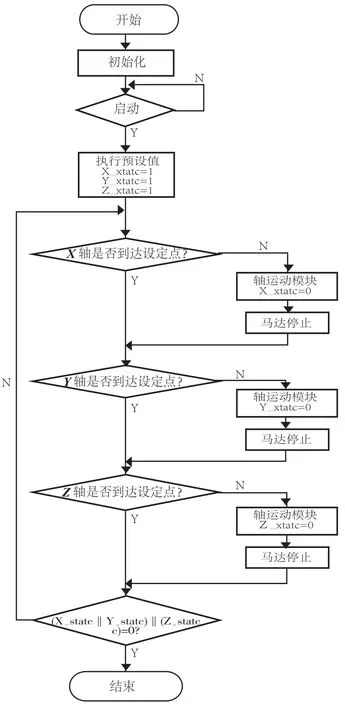
图4 机械手运动流程
[1] 王文凭,李天培.一种智能搬运机器人的设计与实现完成。机械手运动流程如图4所示。[J].计算机测量与控制,2011,19(2):395- 397.
[2] 杜树青.基于Proteus和Keil C51的单片机设计与仿真[M].北京:电子工业出版社,2012.
[3] 李艳春.竞赛机器人性能测试平台的研究与设计[D].西安:西安科技大学,2011.
[4] 曾国强,葛良全.机器人比赛中直流电机驱动电路的设计[J].微计算机信息,2008(14):236- 238.
[5] 李雷.基于MCS- 51控制的军用自动仓储搬运机器人设计实现[J].系统仿真技术,2011,7(2):100- 103.
[6] 王文斌,陈伟.基于AVR的比赛机器人控制系统研究[J].电气传动,2010,40(7):7- 9.
Design and Implementation of Intelligent Handling Robot
LIU Shaojun,WANG Yuyu
(Xi’an Aeronautical Polytechnic Institute,Xi’an,710089,China)
为了提高生产效率,研究设计了一种基于STC12C5A60S2单片机控制的的智能搬运机器人。机械部分主要介绍了机器人的手抓、手臂的机械结构的设计;控制部分系统利用两路光电传感器分别在抓取和放置工件时识别其颜色,通过主控制板输出的PWM信号控制可调速电机按预先设定的路径运行,能够自行判断货物的方位并最终运送到指定位置。并利用ISP下载模块来实现PC机与主控板的程序下载通信。实验证明,设计的智能搬运机器人设计合理,能够实现自动搬运货物的目的。
STC12C5A60S2;光电传感器;PWM;ISP模块
In order to improve production efficiency,this paper designed an intelligent handling robot based on the STC12C5A60S2 single- chip microcomputer.The mechanical part mainly introduces the design of mechanical structure of robot hand and robot arm.The control system uses the two photoelectric sensors for fetching and placing the product,respectively,so that colors can be identified during fetching and placing.The main control board outputs a PWM signal which controls the adjustable speed motor according to the pre- determined path and can automatically judge the orientation of the goods and ultimately deliver the goods to the specified location.The system uses an ISP download module to download program communication between the PC machine and the main control board.The experiment shows that the intelligent handling robot designed in this paper is appropriate for the task,and can achieve the goal of automatic handling of goods.
STC12C5A60S2;photoelectric sensors;PWM;ISP download module
TE937
A
1001- 2257(2015)08- 0077- 04
刘少军(1982-),男,陕西西安人,实验师,研究方向为测控技术与仪器及电子技术。王瑜瑜(1983-),女,山东烟台人,硕士研究生,研究方向为计算机控制和自动化理论。
2015- 01- 21
猜你喜欢
中国电业与能源(2021年4期)2021-05-22
橡塑技术与装备(2021年5期)2021-03-16
广西电业(2020年11期)2020-03-23
电子制作(2019年23期)2019-02-23
制造技术与机床(2018年11期)2018-11-23
无人机(2018年1期)2018-07-05
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
火控雷达技术(2016年2期)2016-02-06
电测与仪表(2015年3期)2015-04-09
