
应用于数字近景摄影测量的可配置三维控制场
2015-06-09 22:39胡祥超吴祖堂朱宝良
计量技术 2015年4期
胡祥超 吴祖堂 朱宝良 郭 弦
(西北核技术研究所,西安 710024)
应用于数字近景摄影测量的可配置三维控制场
胡祥超 吴祖堂 朱宝良 郭 弦
(西北核技术研究所,西安 710024)
三维控制场是影响数字近景摄影测量技术现场应用效能的关键因素之一。提出了一种新颖的可用于数字近景摄影测量的三维控制场实现方法;研制了一套可应用于地下工程围岩变形监测的便携式精密三维控制场系统装置,系统可根据被测目标实际情况动态配置控制场各控制点物方坐标,从而实现控制场网型结构优化,具有小型化、便携化、快速化以及原位化等优点;对控制场精度影响因素及对应抑制措施进行了分析;基于该装置构建了数字近景摄影测量系统并进行了相关应用性实验,实验结果证明了该三维控制场完全满足地下工程围岩变形监测的应用需求。
可配置三维控制场;数字近景摄影测量;围岩变形监测;控制场网形优化
0 引言
地下工程结构的变形测量直接涉及工程安全性问题[1-2]。基于非量测数码相机的数字近景摄影测量技术以其高性价比、易于实现、非接触、无损和高效率等优点,在土木工程安全监测领域有着其它测量手段不可替代的作用,已经成为近年来工程结构健康监测领域研究的热点之一[3-6]。然而由于非量测相机的内方位元素未知且成像畸变较大等缺点,需要预先进行相机标定,在实际测量过程中一般也需要设定一些已知物方坐标控制点,形成控制网从而将被测目标引入控制网内[7-8]。这些工作都需要建立高精度的三维控制场。围岩变形监测贯穿整个地下工程施工过程,这就对三维控制场的自身体积、安装的快捷性以及现场的适应性能提出了更高的要求[9-10]。目前,围岩稳定性的研究还是针对单一具体工程实例,三维控制场的建立多针对特定应用场合,通用性不好,或因提前建立而对现场适应性不好。针对以上原因,提出了一种可应用于数字近景摄影测量的可配置三维控制场实现方法,据此建立的控制场系统装置可根据现场实际环境动态配置控制场网型结构,具有小型化、便携化、快速化以及原位化等突出优点,能够有效提高地下工程围岩变形数字近景摄影测量的工作效率,减少施工交叉干扰因数影响。
1 实现原理
1.1 目标
为满足地下工程围岩收敛变形数字近景摄影测量的现场应用需求,可配置式三维控制场应该具有“系统体积小型化,携带运输便易化,系统安装快速化以及现场应用原位化”的总体特性。因此,需要在满足应用需求和系统精度的前提下,严格控制控制场体积,系统各配件便于拆卸运输且现场安装方便快捷,最后应能根据现场被测目标特征快速配置三维控制场网型结构以便于原位监测应用。
1.2 原理
依据设计目标提出了一种可配置三维控制场的快速实现方法,如图1所示,控制场由基板、标识杆和标识球三部分组成。其中,基板上均匀对称分布有一定数量的控制孔,各控制孔直径相同,均为m,控制孔之间的间距均为固定值k。标识杆一端与控制孔螺纹连接,杆的高度为h,h非固定值可依据设计需求选择不同的数值,标识杆另一端与标识球螺纹连接,所有标识球直径相同,数值为d。标识球圆心作为三维控制场的控制点,各控制点相对物方空间位置可以直接通过控制孔位置与标识杆高度确定,从而能够快速提供三维控制场网形结构。

图1 便携式三维控制场实现原理示意图
1.3 控制场网型的确定
三维控制场为近景摄影测量提供标准控制网,各控制点物方坐标可依据实际需求灵活配置从而形成不同的控制场网型结构。如图1所示,控制场的三维坐标系建立方法为以基板正中心的控制孔圆心为坐标系原点,以基板平面为xoy平面建立空间直角坐标系,各坐标轴分布方向符合右手定则。以图1中A点为例,其物方坐标为x=-2×k、y=-1×k、z=h+d/2-p(p为连接球冠部位切削尺寸),通过合理布置在各控制孔的标识杆与标识球,各控制点物方三维坐标可马上得到,则控制网型立即得到确定,从而能够为数字近景摄影测量技术的现场应用快速提供参考。
2 三维控制场实例
依据前面提出的可配置式三维控制场设计方法,结合地下工程施工实际情况并兼顾非量测数码相机快速标定与畸变校正需求,设计了一套应用于数字近景摄影测量的便携式三维控制场系统装置。该三维控制场具备精度高、重量轻、体积小、拆装便捷以及长期稳定性好等特点。
2.1 控制场组成
可配置三维控制场的组成如图2所示,主要由物理支撑部与坐标控制部组成。物理支撑部的功能是为整个三维控制场系统提供承载支撑以及为坐标控制部提供xoy平面物理约束基础。坐标控制部为控制场关键核心部分,其主要功能是形成各控制点相对物方空间坐标严格精准的三维空间坐标系统,为数字近景摄影测量技术提供精密的三维控制场网形结构。其中,物理支撑部由三角架、底座、托板、支撑杆以及加强板(与坐标控制部共用)组成;坐标控制部由标识球、标识杆、精密微距调节装置以及加强板组成(其实物如图3所示)。控制点的xoy平面坐标由加强板上的控制孔的分布位置实现,控制点的z坐标由标识杆的长度实现。在某些特殊应用场合,为了提高控制场控制网型结构精度,需要对部分控制点的物方空间坐标做细微调整,设计了精密微距调节装置,由标距球、定位块以及调节螺杆组成(如图3(c)所示),依据需求通过旋转调节螺杆使得标距球在定位块径向方向移动,移动距离可从定位块侧面的标度尺上读出,从而实现标距球在细微尺度上的调节(这时以标距球圆心代替标识球圆心作为控制点)。
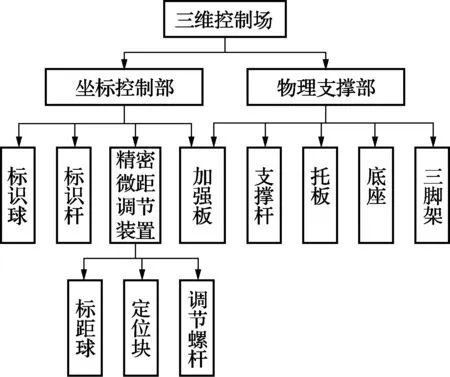
图2 可配置三维控制场组成
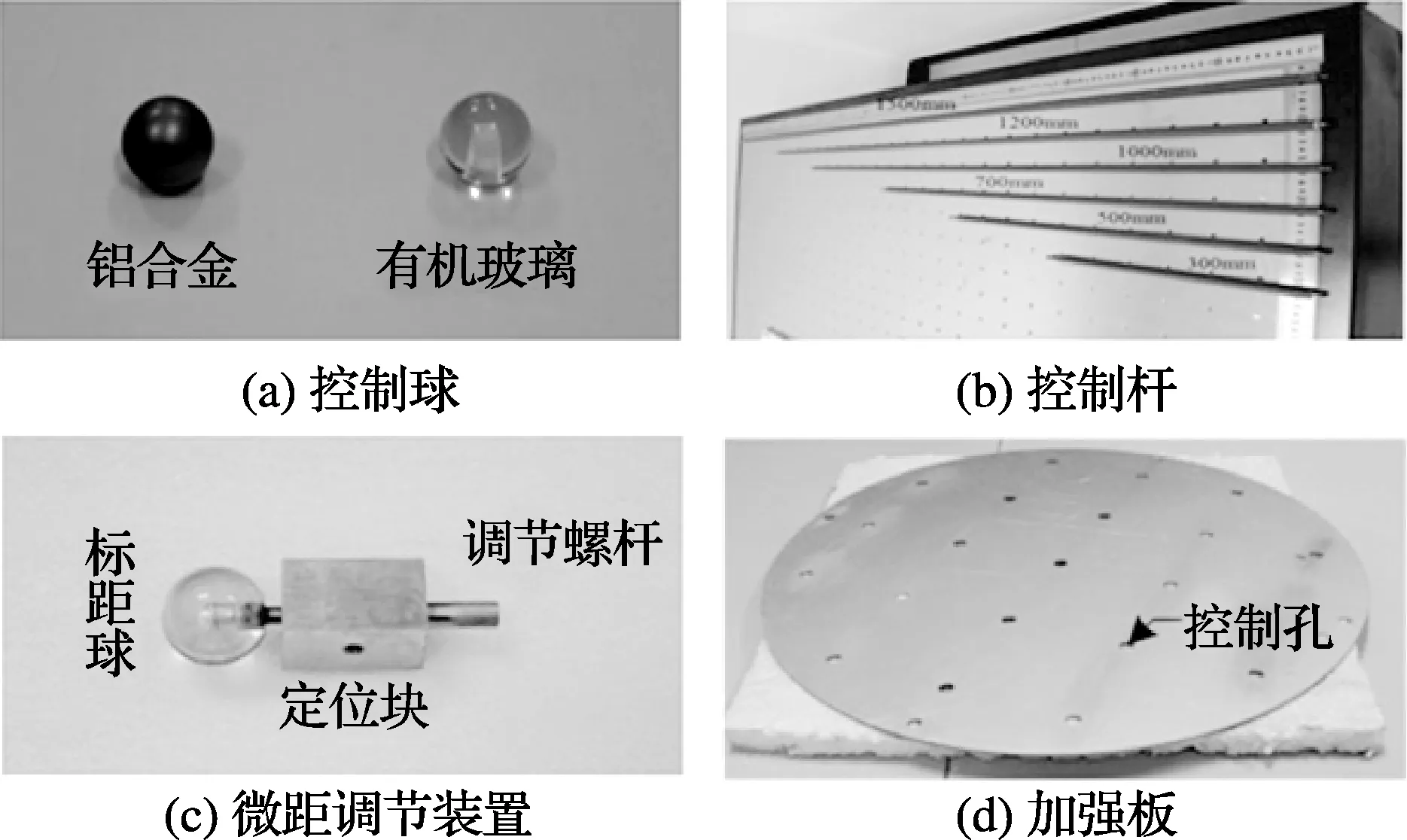
图3 控制场关键配件实物图
为提高数字近景摄影测量技术在地下工程围岩变形监测应用中的自动化程度,对摄影照片的像方坐标需要采用自动提取,同时,为提高提取精度常采用亚像素定位技术。依据计算,为利于图像目标的亚像素定位(控制点像方坐标提取),在采用尺寸为20~30mm的标示球,连接部位球冠弦长在10mm以内,被测物体跨度在2m以上,并使用1800万有效像素普通单反相机的前提条件下,如果标示球相对位置精度控制在0.3mm以内,对于基于直接线性变换算法的空间目标坐标解算精度的影响可以忽略。因此,在设计可配置三维控制场时,所有关键配件等都有严格的尺寸精度和形位公差的限制,以确保总体装配公差控制在0.3mm以内,满足现场使用要求。
整个可配置三维控制场拆装方便,携带运输时可依据坐标控制部与物理支撑部分装于两个整理箱,而现场安装时可根据实际需求快速原位组装成型,系统实物如图4所示,包含拆卸装箱及组装完毕两种情形。

图4 可配置三维控制场实物
本次三维控制场实例的机械设计以标识球物方空间相对位置精度小于0.3mm为基本设计指标输入,由机械设计以及机加工精度来保证,与装配方式和装配次数无关。三维精密控制场可作为标准计量器具用于现场数字近景摄影测量工作中,一般来说,需要在一定时间范围内(例如一年)重新进行标定,以修正量具老化、操作损伤等原因导致的系统误差。
表1给出了控制场部分配件的关键技术指标参数,其中标识球的直径为25mm,采用铝合金和有机玻璃材料制作(如图3(a)所示)以保证在不同应用场合的物理参数的长期稳定性。标识杆长度提供了控制点在z方向上的尺度,因此,标识杆长度越细分对控制场网形的优化越有利,但由于加工难度、性价比以及系统体积等条件的制约,标识杆长度必然为有限几种,本次控制场实例中设计了300mm、500mm、700m、1000mm、1200mm、1500mm以及2000mm共计7个长度的标识杆(如图3(b)所示),采用碳纤维材料制作,每个对应长度标识板数量为21个。加强板的控制孔提供控制点的xoy平面坐标,因此控制孔的数量越多,孔间距越小越有利于控制场网形优化设计,同标识杆的设计思路一致,兼顾可行性等因素,最终设计的加强板中控制孔数量为21个,孔间距为100mm,由镁合金材料制作(如图3(d)所示)。精密微距调节装置共设计21套保证在最大程度上能够实现三维控制场控制点全部由标距球实现。
2.2 精度影响因素分析
可配置三维控制场的最终精度取决于设计、加工、材料、装配以及应用规范等五个环节。可配置三维控制场的设计是以在标准流程指导下的装配环节后各控制点的相对位置精度在0.3mm为设计输入,逆向推导设计得出各装配件的各项关键精度指标为输出(包含平行度、垂直度、表面粗糙度、各向度量精度等参见表1)。因此,设计环节的准确性决定了控制场系统最终的精度指标,是首要前提与重点。各装配件的加工精度必须高于等于设计输出指标以满足设计需求,不可作让步接收以免影响装备最终精度。控制杆长度范围较大,必须具备长期稳定性好的优点,在设计过程中选择碳纤维、镁合金、铝合金等材料(参见表1)以满足各装配件在较大尺度范围以及时间范围内的稳定性。装配过程必须在标准流程的指导下完成,包含装配过程顺序、各装配件配合等。可配置三维控制场的现场应用也必须符合相关的应用规范,例如,装配后的三维控制场必须在稳定状态(控制场网形稳定)下才能开始整个测量过程等。

表1 控制场配件相关指标参数
3 应用性实验
3.1 实验系统建立
基于设计的可配置式三维控制场建立了数字式近景摄影测量系统,如图5所示,系统由Canon550D数码相机、可配置三维控制场以及便携式计算机组成。可配置三维控制场提供精确物方孔间控制网,并将被测物点引入网中;数码相机用于捕获被测物图像,由USB总线传递至运行于便携式计算机的数据处理软件平台(独立研制的SmartDMS围岩变形检测系统);软件平台完成数据的后处理工作,包含像点提取、亚像素定位、图像噪声滤除以及被测物点物方坐标解算等工作。系统采用直接线性变换算法实现被测目标相关参数测量,通过左右摄站的两幅图像直接完成测量与相机的标定工作。

图5 数字式近景摄影测量系统
3.2 测试实验
利用建立的测试系统,在西北某地下工程隧道作了围岩变形现场测试实验,通过分别求解固定于隧道围岩两侧壁锚杆上的标志的空间坐标间接得到隧道围岩两标志点测线之间的距离。测线的真实值为8812.7mm,由高精度全站仪预先获取。依据现场测试环境,现场对三维控制场的网形结构进行了配置,测试实验重复8次,实验结果及相关数据罗列在表2中。通过实验数据可以看出,基于可配置三维控制场建立的隧道围岩变形数字近景摄影测量系统的相对测量误差优于0.1×10-3,绝对测量误差在1mm以下,完全满足现场围岩变形监测的应用需求。
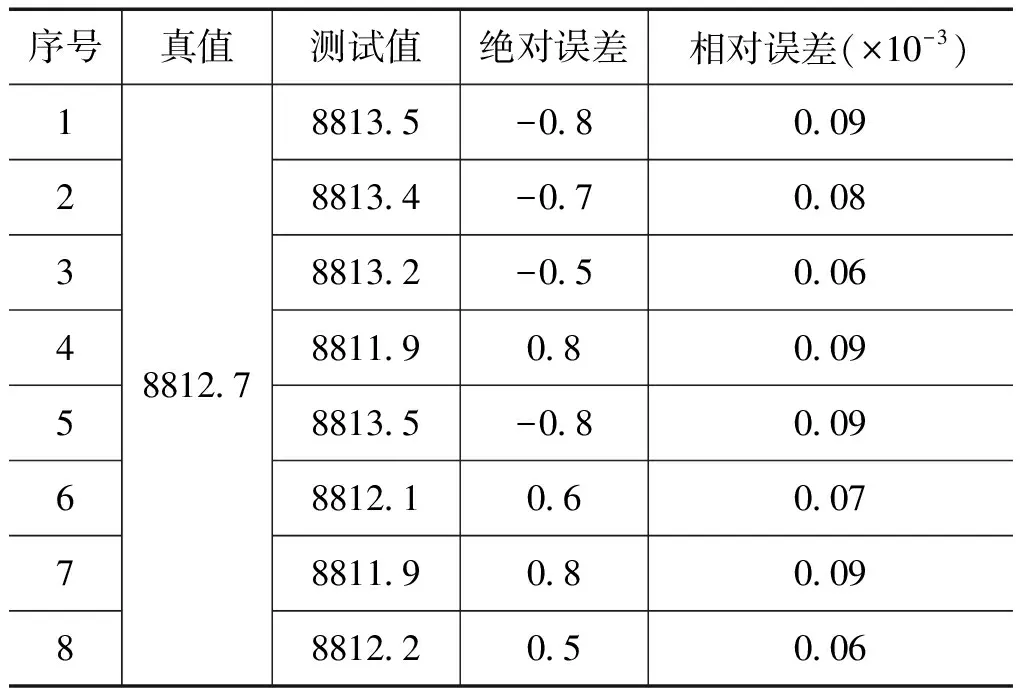
表2 测试实验结果 (mm)
4 结论
三维控制场是影响数字近景摄影测量技术现场应用的关键因素之一。提出的可配置三维控制场实现方法能够实现控制场的小型化、便携化、快速化以及原位化,据此设计的可配置三维控制场系统可依据现场测量应用需求快速配置控制场网型结构,可有效提高系统测量精度和测量工作效率。可配置三维控制场的最终精度取决于设计、加工、材料、装配以及应用规范等五个环节,通过各个环节的严格把关能够保证控制场的设计精度指标以及现场应用的精度需求。基于建立的围岩变形数字近景摄影测量系统在现场开展的测试实验,结果也证明了可配置三维控制场系统在现场应用的可行性,精度较高,完全满足现场应用需求。
[1] 曹跃,张成良.Elman网络在地下洞室变形预测中的应用[J].武汉理工大学学报.,2006,28(2):49-52
[2] 张成良,姜福川,等.基于卸荷模拟开挖的地下厂房稳定性分析[J].武汉理工大学学报,2008,30(12):160-164
[3] Tian Shengli,Ge Xiurun and Tu Zhijun. Testing study on digital close-range photogrammetry for measuring deformations of tunnel and underground spaces[J]. Chinese Journal of Rock Mechanics and Engineering. 2006, 25(7):1309-1315
[4] Dunn Jr, Maynard L.Recent developments in close range photogrammetry for mining and reclamation[C]. 11th Billings Land Reclamation Symposium. 2009, 1: 385-394
[5] 邾继贵,叶声华. 基于近景数字摄影的坐标精密测量关键技术研究[J]. 计量学报,2005, 26(3):35-38
[6] Thomas Luhmann. Close range photogrammetry for industrial applications[J]. ISPRS journal of pfotogrammetry and remote sensing. 2010,65(6):558-569
[7] Xiao, Z. and Jin, L. A cross-target-based accurate calibration method of binocular stereo systems with large-scale field-of-view[J]. Measurement. 2010, 43(11):747-754
[8] 于宁峰.数字摄影测量系统中非量测CCD相机标定算法[J]. 辽宁工程技术大学学报.2007,26(2):23-27
[9] 魏林金,沙月进,占小康.亚毫米级三维控制场建立方法研究[C].交通工程测量技术研讨会论文集,2011,6(2):344-348
[10] 陈晓宁,全斌.近景摄影测量中野外活动控制架的确定方法[C].全国测绘仪器综合学术年会论文集,2003:170-173
10.3969/j.issn.1000-0771.2015.4.05
猜你喜欢
科学(2022年4期)2022-10-25
中国特种设备安全(2021年5期)2021-11-06
青年文学家(2021年1期)2021-03-24
中华建设(2019年12期)2019-12-31
江西建材(2018年4期)2018-04-10
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
中国铁道科学(2015年5期)2015-06-21
全球定位系统(2015年4期)2015-02-28
