
基于CMAC的光电探测系统姿态稳定控制技术研究
2015-06-09 14:21魏国丰国绍文
黑龙江工程学院学报 2015年1期
魏国丰,国绍文,须 莹,李 伟,陈 曦,王 蕊
(黑龙江工程学院机电工程学院,黑龙江哈尔滨 150050)
基于CMAC的光电探测系统姿态稳定控制技术研究
魏国丰,国绍文,须 莹,李 伟,陈 曦,王 蕊
(黑龙江工程学院机电工程学院,黑龙江哈尔滨 150050)
将小脑模型关节控制器(CMAC)神经网络应用于动载体光电稳定跟踪控制系统设计,分别构建CMAC学习算法网络和CMAC控制网络,泛化参数取4,采用δ学习算法调整网络权值,为评估所构建的CMAC网络对目标系统的逼近能力,选定一个非线性系统作为对象,以连续方波为输入信号进行仿真。仿真数据显示,输入信号发生跳变经0.15s后输出信号的稳态误差为0。选用直流力矩电机和分辨率为767×10-6rad的光电编码器构建动载体三轴姿态稳定控制实验装置。结果表明,构建的以CMAC神经网络为核心的控制器在此实验装置上实现的姿态稳定误差为870×10-6rad。
三轴光电跟踪系统;姿态稳定技术;动载体;小脑模型关节控制器;神经网络
光电探测系统以其良好的抗电磁干扰能力、高精度、高灵敏性,在侦查、监视、预警、定位、导航、通信等领域发挥着越来越重要的作用。姿态稳定装置具有隔离载体扰动、保持载荷姿态在惯性空间指向的能力,因此,在光电探测系统中得到越来越广泛的应用。其核心是一个可以补偿载体运动/振动对视线的扰动,并能使视线跟踪目标的精密伺服装置[1-2]。
随着光电捕获、瞄准、监视和跟踪系统的发展,对图像稳定精度的要求越来越高,传统的机械、机电结合或光机电结合转向机构进行光电图像稳定的光电稳定装置,由于采用两轴瞄准线稳定方式,具有不可避免的图像旋转缺陷,已逐渐不能适应高精度图像稳定系统的要求[3-5]。随着计算机技术的发展,捷联式三轴稳像的概念受到越来越多的重视,但真正实用化的系统尚不多见,究其原因,一是大部分载体并不能提供高精度的三轴姿态信号,二是角度方式的高精度三轴捷联惯导组合的成本仍然过高,三是纯速率方式的三轴捷联组合难以提高最终的稳定精度[6]。由于上述原因,基于传统概念但使用新型陀螺(如激光陀螺、光纤陀螺和微机电陀螺等)的三轴平台式光电稳定系统在国外多种新型光电吊舱、导引头和光电桅杆中得到了比较广泛的应用。
动载体光电跟踪装置必须解决两个关键性的技术问题:一是如何减小安装基座运动引起的瞄准线指向稳定误差;二是如何减小由于目标快速运动引起的动态跟踪误差,在跟踪目标的过程中,始终保持瞄准线对准目标,从而保证整个系统所需要的跟踪精度。早期的光电跟踪系统一般采用三环路控制结构,即采用电流反馈构成电流环,测速机反馈构成速度环以及视频跟踪器构成空间位置闭环,从而形成跟踪系统[7-8]。这种控制模式构造简单,具有一定的跟踪能力。但其缺点也很明显,由于反馈器件中不包含任何惯性姿态量反馈,对于动载体产生的扰动仅仅依赖于最外层的空间位置闭环进行校正,其扰动隔离能力完全取决于空间位置环的带宽。空间位置环的带宽很小,其扰动隔离能力有限,这种模式并不适用于动载体高精度光电跟踪系统。为了抑制载体扰动,在系统设计时应使用惯性姿态量传感器(陀螺)作为反馈器件[9-10]。
经典控制器在早期光电跟踪装置中发挥了重要作用,但随着光电跟踪设备跟踪速度、跟踪距离和跟踪精度要求的不断提高,其局限性越来越突出。为了改进跟踪性能,国内外的研究者进行了大量的探索,将滤波预测、前馈控制、复合闭环非线性补偿控制等技术应用到光电跟踪控制系统设计中,并且取得了一定效果[11-12]。近年来,随着计算机、大功率电子器件及电机等技术的迅速发展,智能控制和变结构控制理论的应用研究开始进入一个新的阶段,所研究的对象已涉及到众多复杂系统。本文将小脑模型关节控制器(Cerebellar Model Articulation Controller,CMAC)神经网络应用于光电稳定跟踪控制系统设计,希望能够在三轴光电探测系统的姿态稳定控制方面取得一些进展。
1 运动模型与分析
三轴光电跟踪系统的结构和各转动轴的转动方位如图1所示。设大地坐标系为参考坐标系,三轴光电跟踪系统所在位置为坐标原点,在初始状态时,系统方位轴和横倾轴与z轴重合,俯仰轴与x轴重合,瞄准轴(光电系统视轴)与y轴重合。
根据四元数定义,系统在参考坐标系下的零位瞄准轴矢量为R=yd·j。通过目标探测器测得目标的当前位置r,且目标与光电跟踪系统之间的距离为yd。为使三轴光电跟踪系统的瞄准轴指向目标当前位置r,系统首先绕方位轴转动φ,得到瞄准轴矢量为R1,描述转动的规范四元数为q0;再绕俯仰轴转动θ,得到瞄准轴矢量为R2,描述转动的规范四元数为q1;最后绕横倾轴转动ψ,得到瞄准轴矢量为R3,描述转动的规范四元数为q2,其中:

2 基于CMAC的平台姿态稳定控制技术
2.1 基于CMAC的单轴智能伺服控制系统结构框架
人工神经网络因其强大的自学习、自组织能力和自适应能力在多个领域得到广泛应用[13-15]。小脑模型关节控制器神经网络是一种表达复杂非线性函数的表格查询行自适应神经网络,该网络可通过学习算法改变表格的内容,具有信息分类存储的能力。
CMAC把系统的输入状态作为一个指针,把相关信息分布式地存入一组存储单元。它本质上是一种用于映射复杂非线性函数的查表技术。具体做法是将输入空间分成许多分块,每个分块指定一个实际存储器位置;每个分块学习到的信息分布式地存储到相邻分块的位置上;存储单元数通常比所考虑问题的最大可能输入空间的分块数少得多,故实现的是多对一的映射,即多个分块映射到同样一个存储器地址上。
CMAC已被公认为是一类联想记忆神经网络的重要组成部分,它能够学习任意多维非线性映射。CMAC算法可有效地用于非线性函数逼近、动态建模、控制系统设计等。
基于CMAC的单轴智能伺服系统的结构框架如图2所示。系统中各部分的功能及技术方案如下:
1)速度位置观测与控制规划器是三轴稳定跟踪平台的总体控制器,它利用陀螺、角位置传感器检测到的信号及电机特性参数来构造速度和转子位置的估计方法,并利用实时获取的结果来实现控制策略的最优规划,完成平台的稳定跟踪控制。
2)本文采用两个CMAC网络协同工作实现电机的控制。图2中虚线框所示部分为电机的智能控制器。“CMAC学习算法网络”根据施加到其上的电机输入T、T′和电机输出X产生网络的输出F(X),学习过程中的网络权值存放在“网络权值存储器”中。系统中的“CMAC控制网络”是专供输出使用的,这两个CMAC网络共用“网络权值存储器”。“CMAC学习算法网络”负责将调整后的权值存入“网络权值存储器”,而“CMAC控制网络”负责根据“网络权值存储器”中存放的权值和期望状态Xd产生输出F(Xd)。

图2 单轴智能伺服系统的结构
2.2 基于CMAC的控制算法
1)小脑模型关节控制器(CMAC)神经网络典型结构如图3所示,图中X表示n维输入状态空间,A为具有m个单元的存储区。输入空间的一个点Xp将同时激活A中的C个元素,使其同时为1,而其它大多数元素为0,网络的输出yp即为A中C个被激活单元对应的权值累加和。C值与泛化能力有关,称为泛化参数。
2)向量空间分配。①输入状态空间包括的向量为:电枢绕组电压X1,电枢绕组电流X2,PWM斩波信号占空比X3。②输出向量为:电机转速y1,输出转矩y2,电机转动方向y3。
3)CMAC网络构建。参照图3所示CMAC模型典型结构,按照前述向量空间的定义,分别构建图2中的“CMAC学习算法网络”和“CMAC控制网络”,泛化参数取4。CMAC网络采用δ学习算法调整权值,图4给出其示意图。
用F0表示对应于输入X期望的输出向量,F0=(F01,F02),权值调整公式为

网络的3个输出为
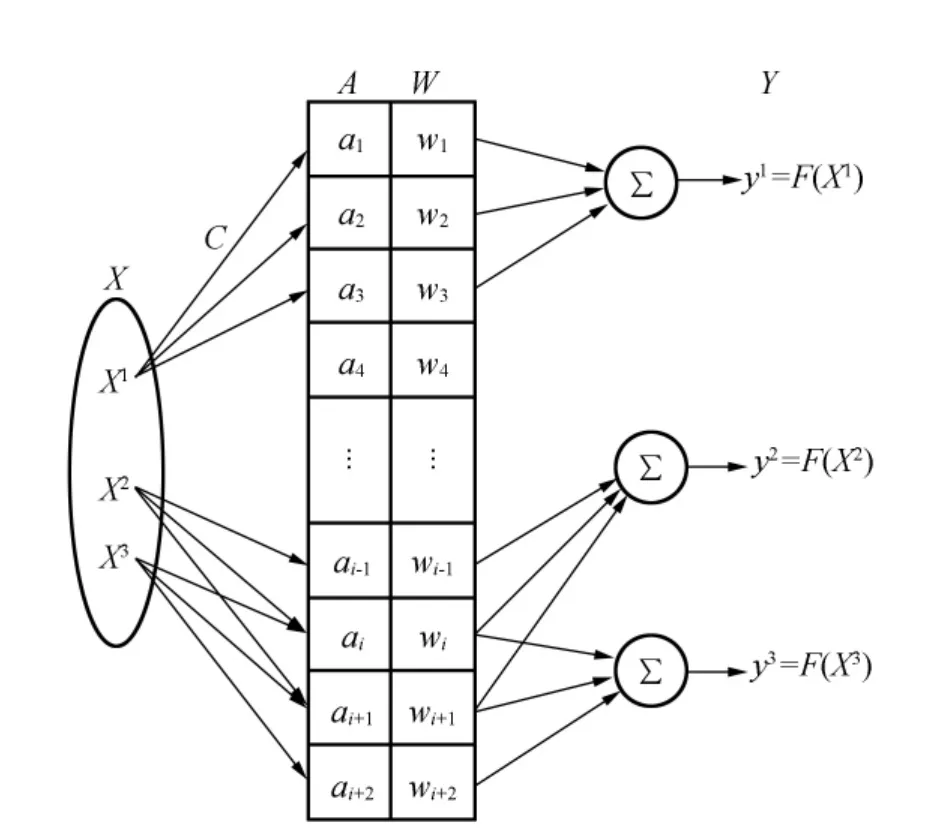
图3 CMAC网络结构

图4 CMAC网络的权值调整

2.3 CMAC网络的逼近能力仿真
为评估所构建的CMAC网络对目标系统的逼近能力,特选定某一非线性对象

仿真中,网络输入取方波信号,采样时间取0.05s,网络参数取m=200,n=100,c=5,η=0.85,α=0.05。仿真结果如图5所示。

图5 CMAC网络对目标的逼近能力仿真
3 结果与讨论
实验测试系统主要包括三轴机电伺服平台、姿态稳定控制器、激光笔、坐标纸等几个部分。坐标纸粘贴在竖直墙面上,激光笔通过机械连接件固定在三轴机电伺服平台的内框上,激光笔投射出的绿色激光束可以等效出稳定平台上搭载的光电探测器的视轴指向。实验时首先调整好基准位置,随后启动姿态稳定控制程序,对三轴机电伺服平台基座输入频率不大于1Hz、摆动角度不超过±10°的随机姿态扰动信号,测量并记录载体姿态扰动作用下激光束投影点的偏移量d1,d2,…,确定其中的最大距离d,通过图6所示几何关系进行计算可得到姿态稳定误差为

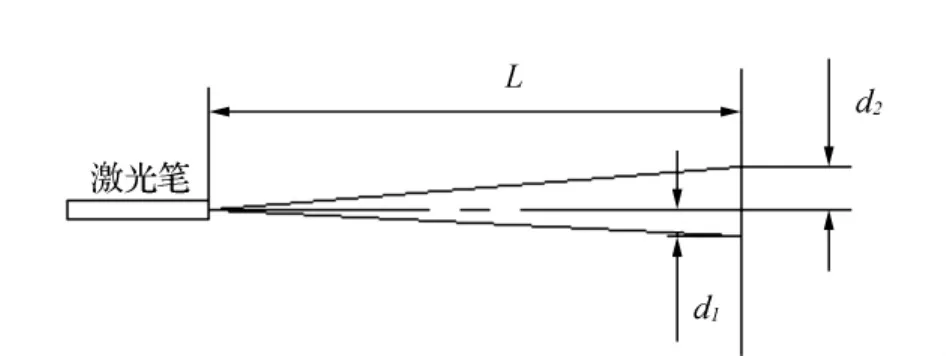
图6 姿态稳定误差检测原理
测试数据如表1所示。

表1 姿态稳定实验测试数据
本文构建的实验测试平台选用的电机和光电编码器都是小尺寸级的产品,光电编码器的分辨率为767×10-6rad。表1显示,在此基础上实现的姿态稳定误差为870×10-6rad,也就是说,其他环节在传感器分辨能力基础上引入的姿态稳定误差为100×10-6rad。若选用高精度的角位置传感器、高性能的力矩电机,结合基于CMAC神经网络的智能姿态稳定控制系统,稳定误差可进一步减小。
4 结束语
由于动载体光电探测系统是一个复杂、非线性的不确定系统,利用经典控制方法对其进行控制存在许多无法克服的缺陷。本文的研究成果表明,以小脑模型关节控制器(CMAC)神经网络为核心并结合其它智能方法构造的智能控制器可以实现较高的控制精度。把人工智能的方法和控制理论相结合是解决复杂系统控制难题行之有效的方法。
本文进行的研究将智能控制方法应用到载体姿态扰动的隔离和视轴稳定跟踪控制中,在智能控制技术与光电探测技术相融合的领域进行了有意义的探索。研究成果不仅对光电探测技术的发展是有益的,对于机器人技术、高精度伺服控制技术等领域也具有一定的参考价值,具有很好的发展潜力和应用价值。
[1]范大鹏.《光电稳定跟踪装置控制技术》专题文章导读[J].光学精密工程,2006,14(4):673-680.
[2]吴卓昆,舒小芳,孙利军,等.车载高精度陀螺稳定跟踪系统[J].光电技术应用,2011,26(6):8-10,17.
[3]张新勇,王合龙,刘昇,等.机载光电稳定平台的模型辨识研究[J].电光与控制,2014,21(3):62-65,71.
[4]王晶,纪明,张冲,等.机载稳瞄系统稳定精度与视距关系的研究[J].激光与红外,2013,43(9):1030-1035.
[5]孙辉,郎小龙,李志强,等.动载体光电平台视轴稳定精度的检测[J].光学精密工程,2011,19(9):2131-2137.
[6]高进,段哲民.三轴稳定跟踪平台建模分析[J].火力与指挥控制,2012,37(11):127-129.
[7]李红光,姜旭,石波,等.光电稳定跟踪平台跟踪控制回路性能测试系统[J].中国测试,2014,40(1):133-136.
[8]尹航,齐蓉,柯栋梁,等.单轴稳定平台伺服控制器设计与实现[J].测控技术,2012,31(7):42-45.
[9]王哲,李其锴,李福东,等.基于DSP+POS的机载稳定平台控制系统设计[J].光学与光电技术,2013,11(6):65-69.
[10]孟海磊,王志胜.基于STM32的三轴车载稳定跟踪平台设计与实现[J].火力与指挥控制,2012,38(12):164-166,170.
[11]李国会,杨媛,向忠武,等.四束激光光轴高精度稳定控制技术[J].强激光与粒子束,2014,26(3):1-5.
[12]刘昊,李红卫,田伟强.一种船载光电稳定跟踪伺服系统的设计与实现[J].电子设计工程,2013,21(12):57-59.
[13]郭绪猛.雷达转台神经网络控制仿真研究[J].雷达科学与技术,2013,11(5):565-568.
[14]曾凯,姜岩,吴玮.神经网络在GPS高程拟合中的应用[J].黑龙江工程学院学报:自然科学版,2013,27(3):12-16.
[15]段洪君,齐世清,史小平.基于递归小脑神经网络的模糊自适应控制[J].沈阳工业大学学报,2012,34(3):343-348.
[责任编辑:郝丽英]
Research of attitude stability control technology for photoelectric detection system based on CMAC
WEI Guo-feng,GUO Shao-wen,XU Ying,LI Wei,CHEN Xi,WANG Rui
(College of Electromechanical Engineering,Heilongjiang Institute of Technology,Harbin 150050,China)
The cerebellar model articulation controller(CMAC)neural network is applied to the design for photoelectric stable tracking control system of motorial carrier,respectively constructing“CMAC network learning algorithm”and“CMAC control network”.The generalization parameter is 4,and the learning algorithmδis used to adjust to the network weights.In order to assess the approximation ability of the CMAC network to built a target system,a nonlinear system is selected as the object.The input signal is continuous square wave and simulated.The simulation data shows that the input signal has changed after 0.15seconds and the steady-state error of the output signal is 0.Using DC torque motor and resolution of 767×10-6rad of photoelectric encoder,it builds a three-axis attitude stability control experimental device of motorial carrier.The result shows that controller based on CMAC neural network is constructed which can realize attitude stabilization error as 870×10-6rad in this experiment device.
three-axis photoelectric tracking system;attitude stabilization technology;motorial carrier;Cerebellar Model Articulation Controller(CMAC);intelligent control;neural network
TP18
A
1671-4679(2015)01-0027-05
2014-10-17
黑龙江省自然科学基金资助项目(E201141)
魏国丰(1970-),男,教授,研究方向:神经网络;光机电一体化技术;数控技术.
猜你喜欢
华人时刊(2022年9期)2022-09-06
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
华人时刊(2020年15期)2020-12-14
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
广州大学学报(自然科学版)(2015年4期)2015-12-23
