激光辅助照明在电视观瞄具逆光成像上的应用
2015-06-09 22:46:39雷俊杰陈文建侯风乾段园园
应用光学 2015年6期
雷俊杰, 陈文建, 侯风乾, 段园园
(西安应用光学研究所,陕西 西安 710065)
激光辅助照明在电视观瞄具逆光成像上的应用
雷俊杰, 陈文建, 侯风乾, 段园园
(西安应用光学研究所,陕西 西安 710065)
针对机载光电装备的电视观瞄具对逆光物体进行观瞄时,光亮度剧烈变化,会产生光晕,无法捕获有用细节这一问题,提出利用激光辅助照明成像方案提高物体在激光波段的照度。在观瞄逆光物体时,一方面通过降低相机的曝光时间降低相面照度,另一方面采用激光辅助照明,对逆光物体进行激光照射。通过实验,电视系统能够对激光的照射进行成像,逆光物体的图像边缘灰度差达到55,满足边缘检测的要求,能够分辨物体边缘信息。
图像光晕;激光辅助照明;同步曝光;边缘检测
引言
现实真正存在的亮度差,即最亮的物体亮度和最小的物体亮度之比为108, 而人眼所能看到的范围是105左右,一般的相机能表示的只有256种不同的亮度。这样便会导致相机在同一场景不同位置亮度极度悬殊,从而造成图像光晕,这就是机载光电设备电视观瞄具在逆光观瞄时,同幅画面亮暗强烈对比,无法捕获有用细节的原因。针对这种图形光晕问题,一方面CCD传感器通常配置相应的抗光晕措施[1-2],在传感器上对偏压和电子流速进行控制;另一方面通过使用软件上的高动态范围(HDR)处理算法[3]加以改进,即使目前商业成像器件对光晕问题进行硬件和软件改进,由于其处理范围有限,机载电视观瞄具在逆光观瞄时仍然无法分辨观瞄物体的轮廓形状。国内外对激光辅助照明技术的应用已进行了相应的尝试,美国Intevac公司开发了一种激光照明二维成像系统[4],增大了目标图像的对比度;美国在无人航空侦察系统中应用了激光主动成像技术[5], 成像距离达到了50 km;长春理工大学研制出一台激光辅助照明主动红外成像样机[6],实现了较好的成像效果。为了解决机载光电设备逆光成像问题,利用机载现有主动光源,对目标进行照射,增强景物在近红外波段的信号强度,借助CCD的近红外响应特性,可使机载光电设备在大动态范围场景下获得良好成像效果。
1 基本原理
1.1 激光辅助照明
激光辅助照明的实现,关键在于激光反射回波能量足够使CCD成像[7]。下面从能量角度出发,根据朗伯定律推导激光传输过程的衰减情况,并结合 CCD的自身条件,计算满足 CCD 的能量公式。
如图1所示,激光照明器的发光位置是O,它的发散角为θ,照明距离为R,激光照到目标上的光束是一个直径为φ,面积为S的圆。当R≫φ时,有关系式:
(1)
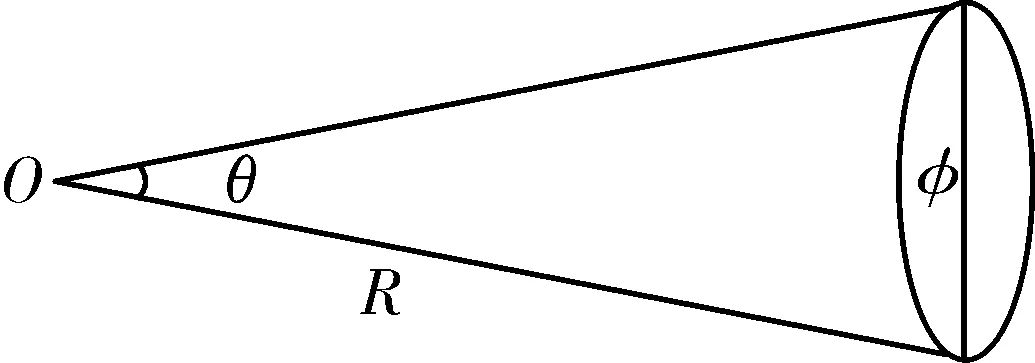
图1 激光照明光束示意图Fig.1 Diagram of laser illumination
根据激光在大气中的传输特性,激光功率为P,则距离R处圆面积S获得的光照明功率为
Ps=Pεexp(-βR)
(2)
式中:ε为发射系统透过率;β为大气透过率[8]。
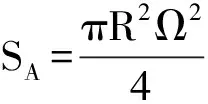
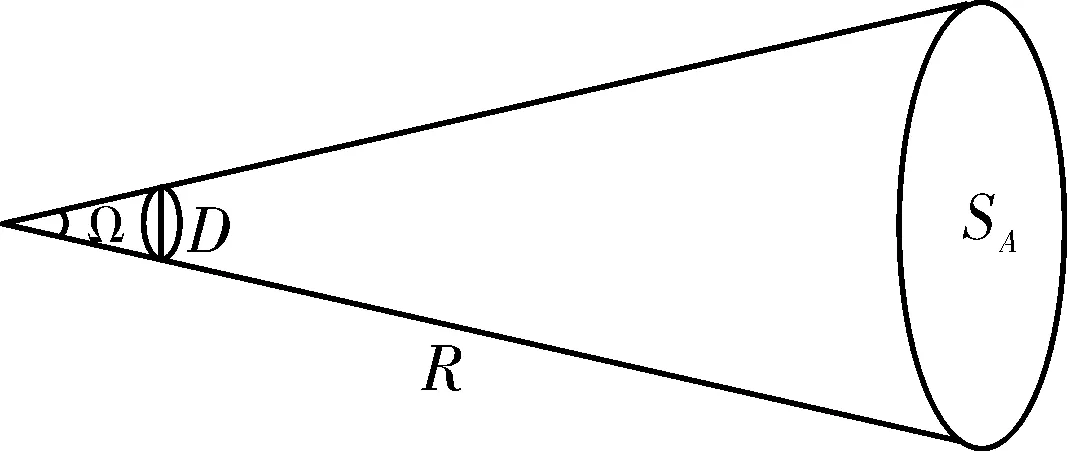
图2 接收系统示意图Fig.2 Diagram of receiving system
目标被激光照明的辐射功率PA为
(3)
设目标的反射率为ρ;镜头的光学透过率为τ,则CCD接收到的激光反射光功率为
(4)
1.2CCD同步时序控制
正常状态下,CCD和激光脉冲的工作时序是不同步的,这样会导致激光脉冲信号和CCD工作的不匹配,激光脉冲的成像完全是随机的,处于CCD曝光时间内时就能成像,不在CCD曝光时间内则无法成像。CCD采用外触发的方式将CCD工作曝光时间和采集到的激光脉冲信号进行同步[9]。图3显示了激光脉冲和CCD工作的曝光时间之间的时序关系。
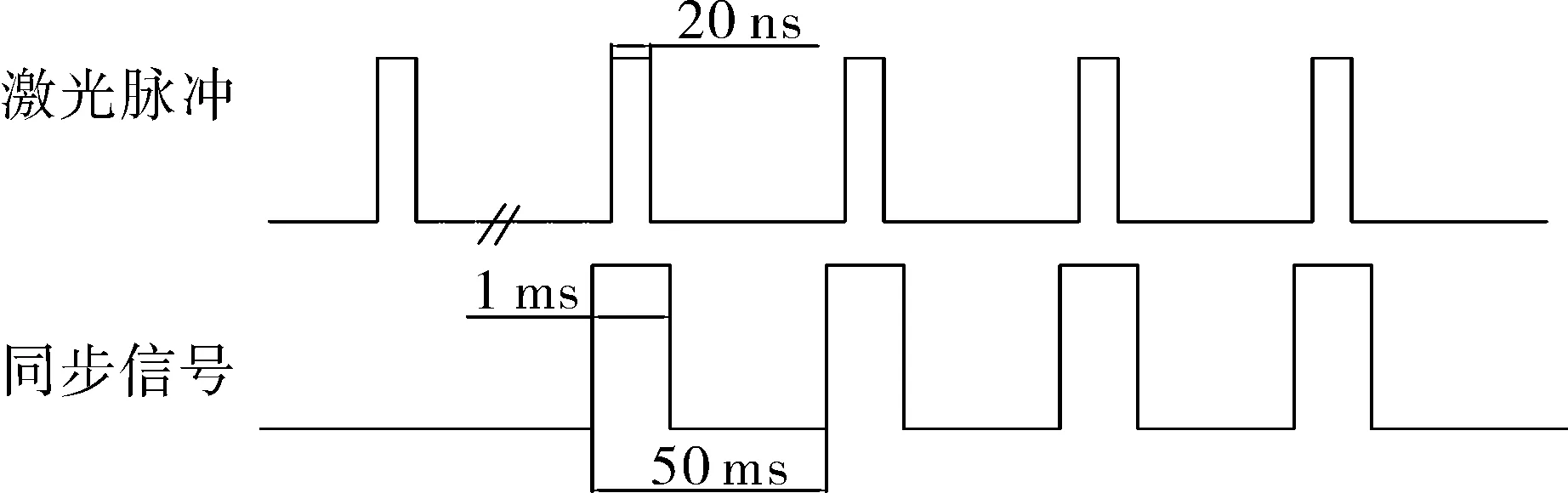
图3 同步脉冲和激光脉冲时序图Fig.3 Sequence diagram of synchronous signal and laser signal
利用FPGA的时序生成电路产生两路TTL信号,通过延时调整时序关系,使得激光脉冲和CCD外触发信号两者完成同步。激光回波信号返回到CCD时正好处于CCD曝光时间中。
1.3 边缘检测算法
图像的大部分信息都表现在图像的边缘中[10],表现特征为图像局部特征的不连续,也就是图像中灰度变化比较剧烈的地方。边缘检测的处理步骤如图4所示。

图4 边缘检测处理步骤
Fig.4 Process steps of edge detection
基于灰度直方图门限法的边缘检测是一种最常用、最简单的边缘检测方法。为了检测出图像物体的边缘,把直方图用阈值(参数为T)分割成2个部分,T的参数选择影响边缘检测的处理质量。对图像f(i,j)实施以下步骤:
1) 扫描图像 f(i, j)的每一行,将所扫描的行中每一个像素点的灰度与T进行比较后得到g1(i, j);
2) 再扫描图像 f(i, j)的每一列,将所扫描的列中每一个像素点的灰度与 T进行比较后得到g2(i, j);
3) 将 g1(i, j)与 g2(i, j) 合并,即得到物体的边界图像 g(i, j)。
2 实验装置搭建
2.1 系统组成
系统由两大部分组成,一部分为激光辅助照明光源,当瞄准好物体时,对物体发射一组照射激光,增强景物在特定激光波段的信号强度,这部分在机载设备上便是测照器;另一部分为图像采集单元,变焦镜头根据观瞄物体远近进行调整,视频相机对物体进行成像,在正常情况下,进行自动成像,当观瞄逆光物体时,借助CCD的近红外响应特性,对激光辅助照明的物体进行成像。这部分在机载设备上便是电视观瞄具。具体组成如图5所示。
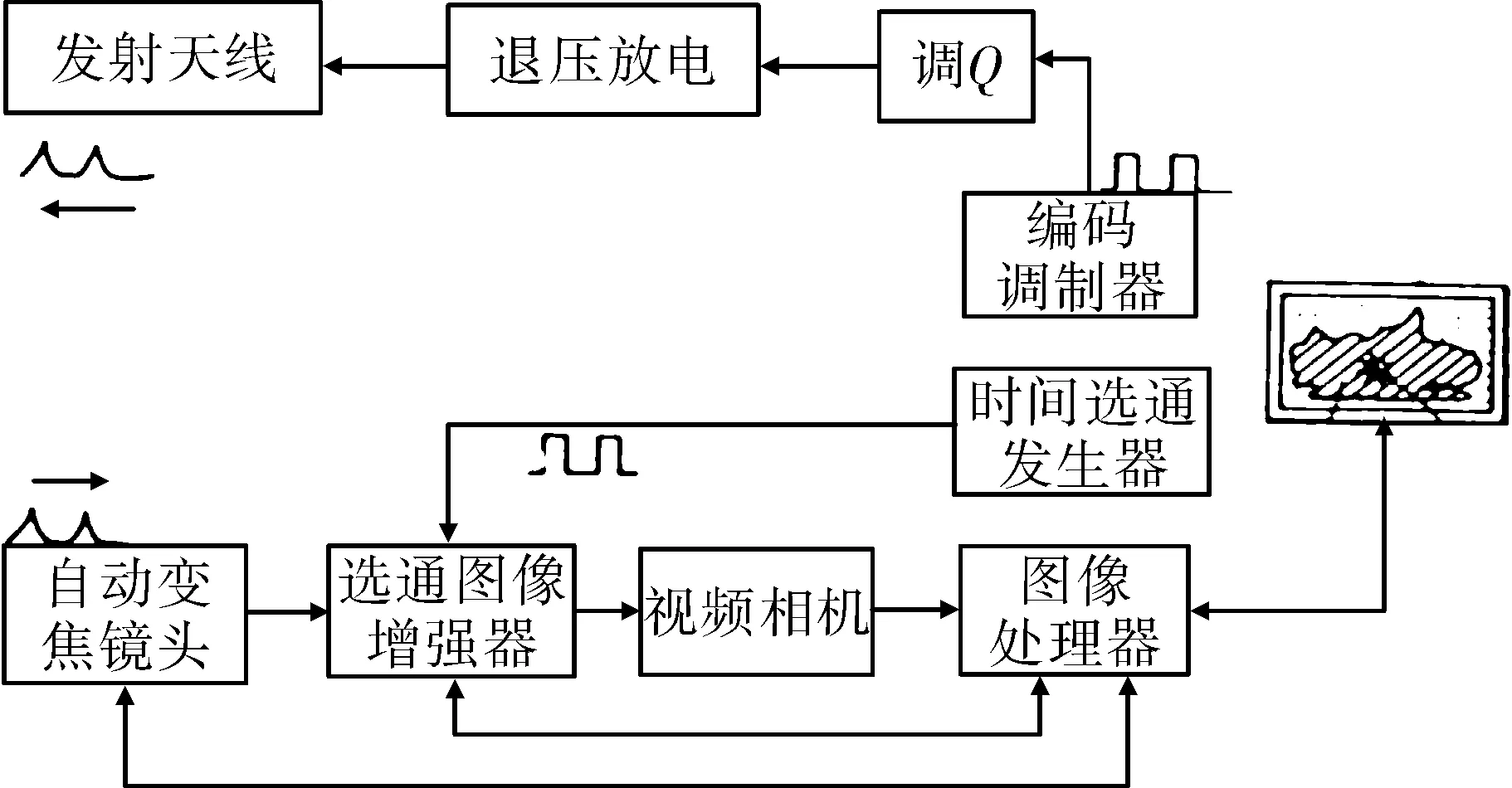
图5 系统组成Fig.5 System composition
时间选通发生器是一个FPGA器件,产生时序TTL信号,该时序信号一方面提供给CCD的外同步控制端,另一方面输出给编码调制器,用于激光编码控制,经过编码控制和延时控制,控制调Q信号,产生相应的高压信号,通过退压放电,过发射天线发射出一组固定编码的激光脉冲。
2.2 设备选取
实验设备分为激光发射光源、电视观瞄具、成像存储处理计算机3大部分。
激光器采用自制的激光照射器,激光能量值为80 mJ,照射器脉宽为20 ns,激光束散角为1 mrad。激光发射天线口径为60 mm。发射重复频率为20 Hz,激光波长为1 064 nm。
电视观瞄具中光学镜头经过近红外波段光学设计,近红外波段的透过率大于70%,口径为50 mm。电视观瞄具中的相机采用近红外相机,型号为NIR300,分辨率为320像素×256像素,靶面尺寸为9.6 mm×7.68 mm,由图6响应曲线可见,在1 064 nm处的光谱响应度大于70%。这样的配置能够对反射的微弱激光进行成像。
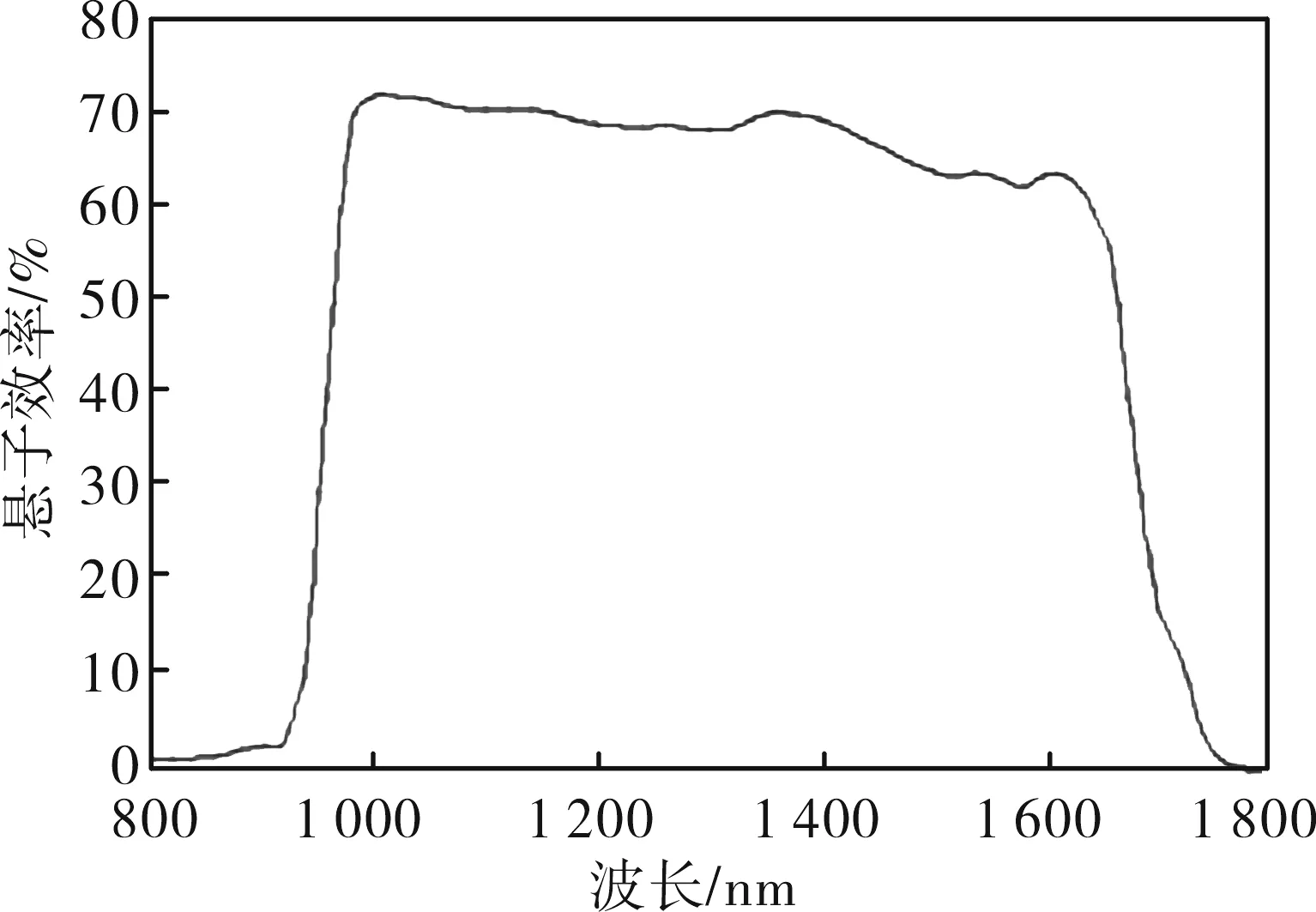
图6 近红外相机响应曲线Fig.6 Spectral sensitivity of IR camera
将照射器中FPGA产生的TTL时序信号提供给电视观瞄具近红外相机的外触发控制端,保证相机工作和激光发射时序同步。
激光照射器和电视观瞄具在实验前进行光轴校准,保证远距离地照器照射的激光能够在电视观瞄具的视场范围内。
实验中在地面上对逆光物体进行模拟成像,太阳能蓄水筒在正午时分反射的太阳光很强,能够近似地模拟逆光物体。
3 实验过程及结果分析
实验中首先将CCD调整到处于自动运行状况,相当于电视观瞄具处于常规运行状态,如图7(a)所示,太阳能蓄水筒反射的强太阳光产生光晕,周围的物体由于对比度的关系,无法分辨具体的细节。
调整CCD处于外触发工作模式,为了尽可能地抑制反射太阳光中的近红外波段,将相机曝光时间设为1 ms,使得太阳光产生的光晕现象影响变弱。得到图 7(b)所示的图像,可以看出,整幅图像比较暗,反射太阳光比较强的部分亮度降低。
在CCD外触发工作模式下,同步照射激光脉冲,近红外电视观瞄具捕捉到物体反射的激光光谱的图像,得到图7(c)所示的图像,可以看出,整幅图像摆脱了光晕的影响,边缘清晰可见。
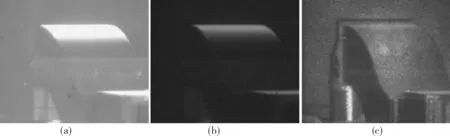
图7 使用不同方法获得的逆光物体图像Fig.7 Image of backlighting object obtained in different ways
3.1 图像对比度分析
人眼在观看一幅图像时,好的图像对比度能保留图像更多的细节,合适的图像亮度能够使图像对比度符合人眼的需求。
图8(a)为常规观瞄的灰度值,可以看出灰度有2个波峰,一个灰度在140附近,一个灰度在临近饱和的240附近,成像时光照过强,使得整幅图像偏亮,这种情况为低对比度;图8(b)为1 ms曝光时间的电视观瞄图像灰度值,图像亮度集中在
35附近,此时成像时光照不足,使得整幅图像偏暗,这种也属于低对比度;低对比度情况下,颜色都挤在一起,没有拉开,图像细节难以表现出来。
图8(c)为在1 ms曝光时间并加以激光辅助同步照明时观瞄图像的灰度值,图像亮度在90附近,而且灰度值覆盖的范围比较广,反映了图像亮度变化动态范围广,图像的亮度范围拉开,使得该范围内的像素,亮的越亮,暗的越暗,从而达到增强对比度的目的。
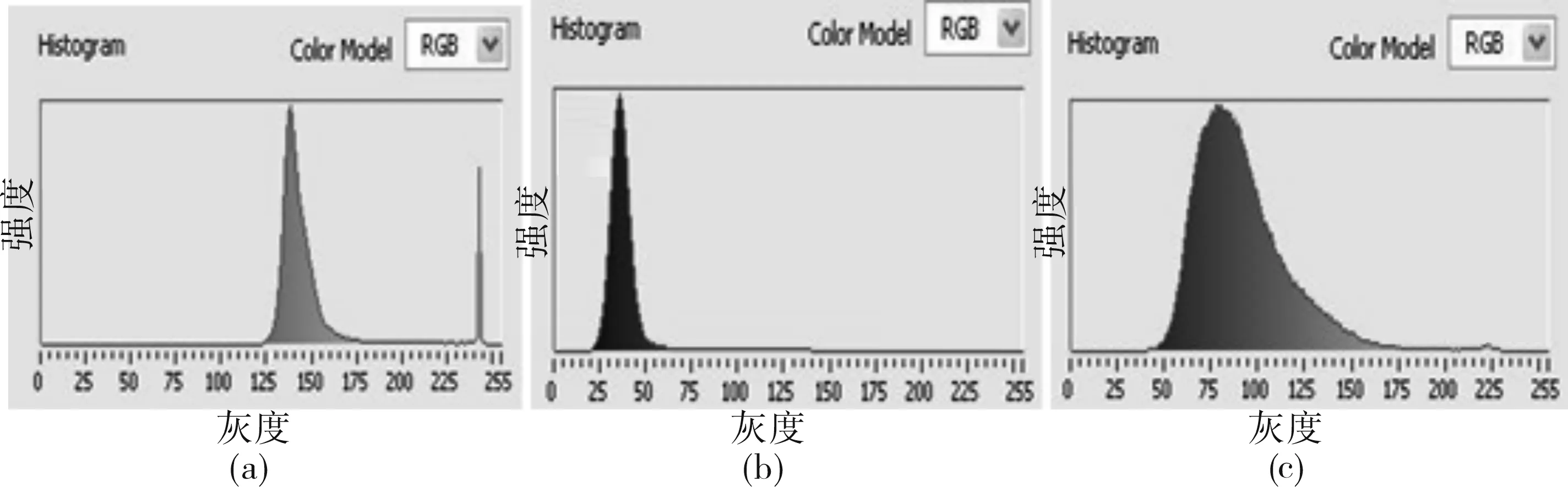
图8 图像的灰度分布图Fig.8 Gray value distribution diagrams of images
对比可以看出,经过激光同步辅助照明物体对比度在90附近,满足人眼对图像亮度的要求。
3.2 图像边缘检测
利用边缘检测图像处理方法对图像进行处
理,对逆光物体最亮的部分下方进行边缘检测,如图9所示,采用Labview图形化软件进行编程,实现对图像的灰度检测、阈值设置及边缘检测,得到图10所示的处理结果。

图9 软件处理界面Fig.9 Processing interface of software
由图10(a)可以看出需要分辨的物体边缘无法分辨,边缘特征为被光过亮照射的亮斑边缘,不是物体的真实边缘。边缘检测时由于反光部分灰度为150附近,背光部分由于光晕的作用灰度为140附近。灰度差为10,故无法分辨物体形状及边缘特征;图10(b)边缘检测过程中由于目标物体太黑而没有显示,没有物体的轮廓信息,反光部分灰度为50附近,背光部分灰度为40附近,灰度差为10,无法分辨物体边缘轮廓;图10(c)能够分辨物体的边缘,图像处理采用物体边缘检测原理,经过检测后,反光部分灰度值为125附近,背光部分为70附近,灰度差为55,灰度差足够大以至于边缘检测能够检测到,物体的边缘1和2可以清晰地显示出来。
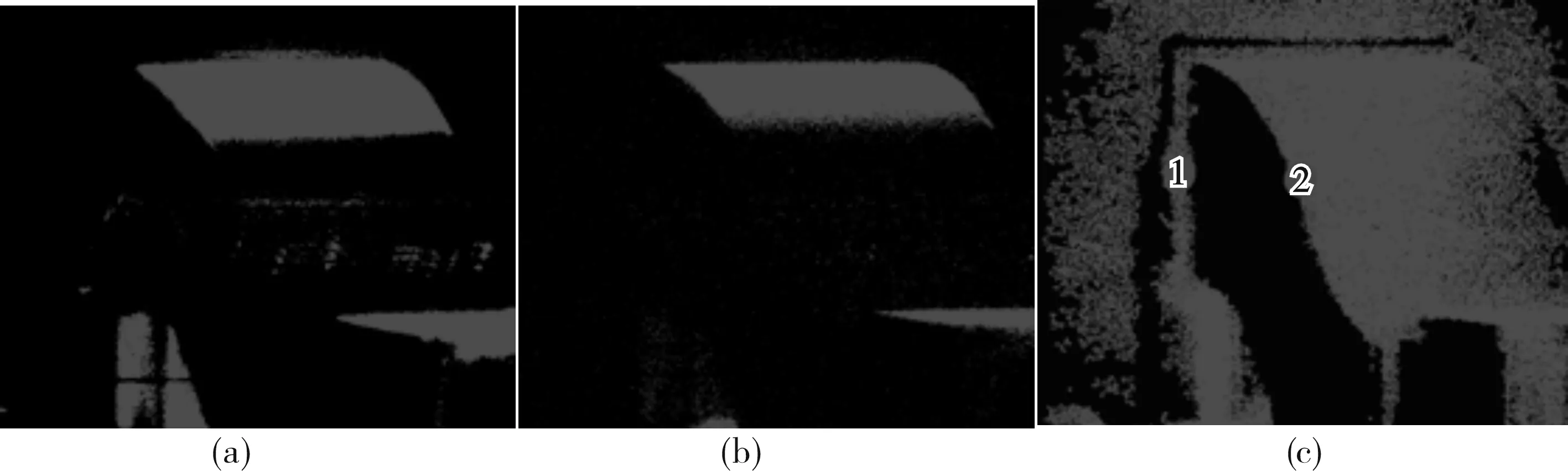
图10 边缘检测算法结果Fig.10 Result of edge detection
图像的大部分信息包含在边缘中,经过辅助照明后观瞄到的的逆光物体摆脱了太阳光光晕的影响,边缘细节更容易分辨。
4 结论
本文针对电视观瞄具在光亮度剧烈变化的情况下,会产生光晕的问题,提出使用激光辅助照明的方法来提高物体在激光波段的照度,通过同步电视摄影使电视观瞄具达到对激光照明物体成像的目的。经过实验,经过在降低相机积分时间的基础上辅助以频率为20 Hz激光照射,能够将逆光图像中物体的边缘灰度差达到55,物体边缘能够被检测到。
[1] Wu Lifan, Liu Changlin, Chen Hongbing,et al. A CCD image sensors with vertical anti-blooming structure[J]. Semiconductor Optoelectronics, 2007,28(1):36-39. 武利翻,刘昌林,陈红兵,等.CCD 纵向抗晕结构研究[J]. 半导体光电,2007, 28(1):36-39.
[2] Wang Jian, Zeng Hui. Anti-blooming array CCD image sensor and realization of anti-bloming method[J]. Journal of Xi’an Technological University,2007, 27(6):558-562. 王健,曾辉. 抗晕光面阵CCD图像传感器及抗晕光方法的实现[J]. 西安工业大学学报, 2007, 27(6):558-562.
[3] Hua Shungang, Wang Lidan, Ou Zongying. Alignment of images with varying exposure level from a same scene and HDR image construction[J]. Journal of Computer-aided Design & Computer Graphics, 2007, 19(4):528-534. 华顺刚,王丽丹,欧宗瑛. 同一场景不同曝光图像的配准及HDR图像合成[J]. 计算机辅助设计与图形学学报, 2007, 19(4):528-534.
[4] David D,Steve B. Long-range laser illuminated imaging:analysis and experimental demonstrations[J]. Opt. Eng.,2001,40(6):1001-1009.
[5] Snell K J. An active range-gated near-IR TV system for all-weather surveillance[J]. SPIE, 1997,2935:171-181.
[6] Xu Xiaowen, Guo Jin, Fu Youyu,et al. Recent advances in active range-gated laser imaging technique[J]. Laser Journal,2003,24(5): 1-3. 徐效文,郭劲, 付有余,等. 距离选通激光主动成像技术研究进展[J]. 激光杂志,2003,24(5):1-3.
[7] Zhang Wentao, Zhu Baohua. The study for laser beam transmission character in atmosphere random channel by using CCD[J]. Journal of Applied Optics, 2004, 25(5):33-36. 张文涛,朱保华. 利用 CCD研究激光束在大气随机信道中的传输特性[J]. 应用光学, 2004,25(5):33-36.
[8] Jia Jianzhou, Song De’an, Jia Renyao,et al. Attenuation estimation of laser atmospheric transmission [J]. Electronic Information Warfare Technology, 2010, 25(4):73-76. 贾建周, 宋德安,贾仁耀,等. 激光大气传输衰减的估算方法[J].电子信息对抗技术,2010,25(4):73-76.
[9] Dai Ming, Ling Liqing, Sun Lina,et al. Full automatic light adjustment control for CCD camera by external trigger[J]. Optical and Precision Engineering, 2008,16(11):2257-2262. 戴明,凌丽青,孙丽娜,等. 采用外触发方式实现CCD摄像机的全自动调光控制[J]. 光学精密工程,2008,16(11):2257-2262.
[10]Duan Ruiling, Li Qingxiang, Li Yuhe. Summary of edge detection[J]. Optical Technique, 2005,31(3):415-419. 段瑞玲,李庆祥,李玉和. 图像边缘检测方法研究综述[J]. 光学技术,2005,31(3):415-419.
Application of laser auxiliary illumination on TV assembly backlight imaging
Lei Junjie, Chen Wenjian, Hou Fengqian, Duan Yuanyuan
(Xi’an Institute of Applied Optics, Xi’an 710065, China)
When the TV sight of airborne EO device is viewing the backlighting object, the brightness changes dramatically, which can produce image blooming,so the system is unable to capture useful details.Aiming at the problem, we proposed a scheme to solve the image blooming by utilizing the laser auxiliary illumination. When the equipment observed the backlighting object, the designator illuminated a laser of a certain frequency to irradiate the object,meanwhile, the exposure time of camera was reduced so as to decrease the illumination. Experiment shows that the TV system can format a image of laser irradiation,the histogram difference of the image edge is about 55,which meets the demand of edge detection, and the edge information can be distinguished.
image blooming; laser auxiliary illumination; triggered exposure; edge detection
1002-2082(2015)06-0971-06
2015-01-06;
2015-09-09
雷俊杰(1983-),男,山西晋中人,工程师,主要从事光电探测及激光成像技术方面的研究工作。
E-mail:leijunjie971@163.com.
TN249
A
10.5768/JAO201536.0605004
猜你喜欢
家教世界(2023年28期)2023-11-14 10:08:20
作文成功之路·作文交响乐(2023年2期)2023-07-13 02:34:42
读者(2023年6期)2023-03-18 06:05:26
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
下一代英才(酷炫少年)(2017年12期)2018-01-19 03:39:21
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
计算机与网络(2015年8期)2015-12-27 07:37:41