基于PSD的激光跟踪仪光电瞄准技术应用与研究
2015-06-07 10:45刘娇月杨聚庆董登峰
仪表技术与传感器 2015年7期
刘娇月,杨聚庆,董登峰
(1.河南工业职业技术学院柔性实验室,河南南阳 473009;2.北京工业大学应用数理学院,北京 100124;3.中国科学院光电研究院,北京 100094)
基于PSD的激光跟踪仪光电瞄准技术应用与研究
刘娇月1,杨聚庆2,3,董登峰3
(1.河南工业职业技术学院柔性实验室,河南南阳 473009;2.北京工业大学应用数理学院,北京 100124;3.中国科学院光电研究院,北京 100094)
光电瞄准与定位技术是空间运动目标动态跟踪测量的关键技术,起到目标捕获与运动位置偏差精确指向作用。基于光电位置传感器(PSD)对激光跟踪仪的光电瞄准和跟踪定位控制技术进行了分析研究与设计,提出了光电瞄准控制方案,设计了探测光路,分析了PSD误差修正与信号处理。经过实际样机测试,静态定位测量精度达到6 μm,随机动态跟踪测量速度大于1 m/s。
光电瞄准;PSD;探测光路
0 引言
激光跟踪仪用于超大尺寸空间几何量测量及动态轨迹测量,它具有测量功能多、测量精度高、测量速度快、量程大、可现场测量等特点,是大型科学工程和大型高端装备制造中急需的测量装备[1]。我国大型飞机零部件、工装型架测量以及总装测量、卫星安装测量等高端智能制造领域均对激光跟踪仪测量提出了迫切要求[2]。
激光跟踪仪光电瞄准技术是实现目标空间坐标精确测量和空间运动轨迹动态跟踪测量的关键技术,直接影响到仪器的整体测量精度和使用性能。激光跟踪仪测量对象具有典型的空间随动目标特性,通过采用空间运动目标光电探测瞄准和快速定位技术,可以实现对大范围远距离运动目标进行实时的精确跟踪和精密测量。本课题依托激光跟踪仪样机研制,对基于光电位置传感器(PSD)的瞄准控制技术进行了分析研究与应用设计。PSD具有光谱响应范围宽、响应速度快、分辨率高、可靠性好、光敏面内无盲区且处理电路简单等优点。由于其测量精度高,光斑位置的微小变化都会引起输出电压值的变化。在精度要求高、测量速度快的场合常选用 PSD 作为位置探测器件。
1 PSD定位探测原理
PSD是基于横向光电效应Lucovusky 方程的光电探测器件。它通过探测光强重心位置来测量光斑的位置与位移。文献[3-4]用不同的方法证明了探测光斑的不对称性、不规则性对PSD的即时探测精度几乎没有影响,测量结果与光斑尺寸外形无关,只与其重心有关。
图1中,两对电极分别位于 PSD 的光敏面和背面,相应的光电流在两个面流动,因此称作双面分流型 PSD。双面分流型 PSD 可以提供高精度的光斑位置信息,在连续型二维 PSD 中,其测量精度可以说是最高的。这主要是因为其结构上的特点使它更加类似于两个一维 PSD,PSD的输出信号与入射光点位置坐标计算公式如下[5]:
X方向坐标:
(1)
Y方向坐标:
式中:PSD中心为坐标原点;LX、LY分别为PSD信号电极间的距离;X1,X2,Y1,Y2为各电极的输出电流。
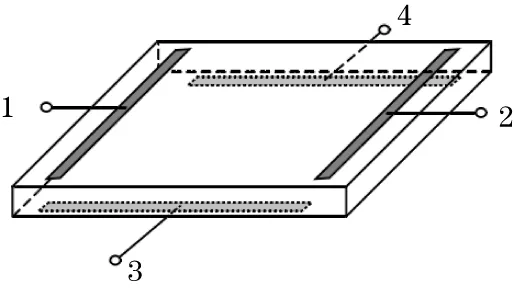
图1 二维双面分流型PSD结构示意图
本设计选用二维两面型PSD位置传感器,型号为S2-0003,光敏面为10 mm×10 mm。PSD上升时间(响应时间)的典型值为80 ns,最大值为200 ns,1/200 ns=5 MHz,A/D采样时间及滤波时间≤100 μs,可以满足PSD的输出频率为1 kHz的要求。考虑在相同光功率下,红光可以使PSD 产生角大的光电流,因此光源选用25STP910 He-Ne激光器,工作波长632.8 nm,输出功率为1 mW,根据光路计算分析,到达PSD探测器靶面上的光功率约为300 μW。
2 光电瞄准控制方案
激光跟踪仪工作时,激光测距系统获得目标到仪器的精确距离r,方位编码器和俯仰编码器测角系统分别测出目标方位角A和俯仰角E,通过极坐标与直角坐标转换关系,获得目标的空间直角坐标[2]。根据激光跟踪仪工作原理,本课题设计了“角锥+PSD”光电探测瞄准,“调理+FPGA”信号处理,“DSP+伺服”快速跟踪控制的光电瞄准与定位系统技术方案。采用光斑位置检测法,利用物体移动时造成PSD探测器上的测量光斑位置发生相应改变的原理,进行实时跟踪与定位,适合静态精确瞄准和动态快速跟踪测量的场合。
系统工作过程如图2所示,激光器发出的测量光束通过跟踪反射镜射向目标靶镜,用于测量和跟踪的目标靶镜是一个内嵌角锥棱镜的光学反射器,跟踪头内部的激光器发出的激光束通过光学镜组照射到跟踪反射镜上,跟踪反射镜反射后照射到光学反射器角锥顶点上,经目标靶镜反射后,光线平行于原光束返回,到达分光镜后一部分激光束被反射到PSD位置探测器上,另一部份进入激光干涉仪进行距离干涉测量。进入PSD的光束用于对目标靶镜的跟踪,当光束进入跟踪球中心位置时,返回光束相对于入射光束没有位置偏移,PSD输出信号为0,此时控制系统处于静态平衡状态;当目标靶镜移动时,返回光束相对于入射光束产生位置偏差,位置探测器输出偏差电流信号,通过控制算法解算,输出控制信号驱动伺服电机带动跟踪反射镜旋转,改变进入目标靶镜的光束方向,使偏差信号减小,实现对目标的跟踪。
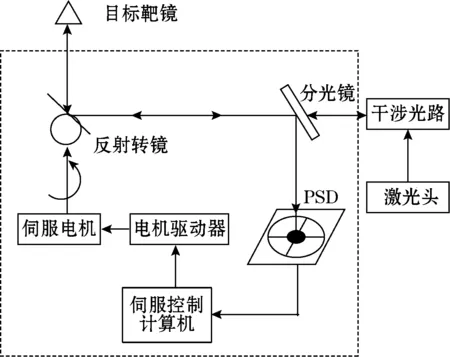
图2 系统工作原理示意图
3 光电瞄准探测光路


图3 光电瞄准探测光路
4 PSD误差补偿与信号处理
对于二维 PSD,由Lucovsky 方程的解析解可以得出电极光电流的解析表达式。光斑位置坐标与电极光电流关系的实际表达式与PSD 的位置计算式(1)存在非线性误差,所以按照式(1)计算光斑位置会产生枕形非线性失真,如图4所示。图中虚线表示实际的光斑位置,实线表示根据式(1)得到的计算光斑位置。需要进行误差修正。常用的非线性修正方法主要是插值法和神经网络法[6]。设计采用数学校正的方法,将PSD和光源放置在相互平行的两个导轨上,使光源沿平行于PSD光敏面的方向运动,光源每次位移确定的量,测得PSD的输出曲线,用最小二乘法拟合该曲线,得到的拟合曲线即认为是修正了非线性误差的PSD输出[7-8]。修正后的PSD只在四个顶角附近存在较大的非线性,在中央大部区域的线性度非常好。A 区内的均方根误差小于2 μm,均方根非线性小于 0.1%;B 区内的均方根误差小于6 μm,均方根非线性小于 0.1%。

图4 PSD非线性网格图
实际工作环境下,背景光和环境温度变化带来的暗电流,对PSD探测精度影响较大。除了采取光学滤波法外,还采用了采样-保持法,即分别测出信号光源和背景光单独作用下的PSD 响应,将背景光和暗电流的影响消除。
入射光斑通过光学系统后,照射到PSD靶面上,探测器将光斑的位置信号转化为电信号,经过信号调理、A/D转换后被FPGA获取,FPGA将数据进行运算处理后,得到光斑在X和Y方向的位置。最后,FPGA以异步串行的方式通过LVDS发送器将X方向和Y方向的位置数据发送给DSP进行计算和跟踪伺服控制。信号调理电路部分包括 I/V(电流/电压)转换、滤波电路、二级放大电路等几部分。电流信号经调理后转化成电压信号进行A/D转换[9-10]。
在仪器装调过程中,由于机械机构、光路系统在安装过程中难以达到理想状态,使得真正的激光视轴跟踪零点和PSD的几何中心存在一定的偏差。项目设计采用像旋法进行补偿修正,通过将靶球安装到跟踪仪竖轴旋转轴上,旋转竖轴,观察并微调整靶球位置直到PSD表面探测光斑为圆形分布,对PSD光斑偏移位置数值进行计算拟合,求出光斑圆形轨迹的圆心,从而得到实际的PSD跟踪零点,实现激光跟踪控制过程即为激光脱靶量的归零过程。
5 系统测试
搭建了目标位移量标准测试平台,对样机光电瞄准系统探测信号进行测试。实验环境为室内夜晚,位移平台选用M-112.1DG 高精度电机驱动位移平台,行程 25 mm,精度为 1 μm。目标靶镜固定在位移平台,距离跟踪仪反射镜1 m,调整测试平台以使反射镜出射光束基本与目标靶镜平行。分别以匀速固定步长和动态变化速度控制位移平台使目标靶镜移动,上位机接收处理器输出的位移信号数据。
5.1 定位瞄准测试
以 0.1 mm为步长,分别匀速运行0~1 mm距离,然后定位静态测量,进行了 10 组测试。测得数据结果用MATLAB软件进行处理,误差分布图如图5所示。

图5 静态瞄准测试误差分布
由5图可知,PSD 的最大静态位置测量误差在 6 μm 以内,达到激光跟踪仪的使用精度要求。
5.2 动态跟踪测试
目标靶镜固定在平台移动导轨座上,与激光跟踪仪对准后,沿着导轨左右随意变化速度移动靶镜,进行跟踪测量。经测试,在一定速度变化下,能够保证跟踪仪始终跟踪目标,记录靶镜位置坐标值的移动速度如图6所示。

图6 靶球移动测试速度曲线
从靶球移动速度数据中可以看出,在靶球移动的(线)速度≤1 m/s时,激光跟踪仪能够实现动态跟踪测量。实际使用时,被测物体距离激光测量仪一般约1 m以外,所以该指标能够满足实际使用需求。
6 结论
基于PSD光电位置传感器对激光跟踪仪的光电瞄准和跟踪定位控制技术进行了分析研究与设计,提出了光电瞄准控制方案,设计了探测光路和信号处理电路,搭建了跟踪实验系统,进行了PSD误差补偿修正与信号处理。在暗室的稳定光学平台上开展了近距离实验,经过实际样机测试,静态定位测量精度达到6 μm,随机动态跟踪测量速度大于1 m/s,跟踪定位测量结果稳定。
[1] 周维虎,丁蕾,王亚伟,等.光束平差在激光跟踪仪系统精度评定中的应用.光学精密工程,2012,20(4):851-856.
[2] 周维虎,崔惠绒,丁金滨,等.基于激光跟踪仪的天基望远镜安装测量技术.红外与激光工程,2008,37(Z):250-252.
[3] 张晓芳,俞信,蒋诚志,等.位置敏感探测器PSD 特性的试验研究.仪器仪表学报,2003,24(4):250-252.
[4] 尚鸿雁,张广军.不同光源模式下位置敏感探测器响应特性分析.光电工程,2005,32(1):93-96.
[5] 朱明珠,陈培峰,周保玉.激光位置检测中PSD的误差分析与实验研究.光电子技术与信息,2006,19(3):10-14.
[6] 管炳良,李星,王俊.二维PSD非线性修正技术研究.仪器仪表学报,2007,28(7):1295-1299.
[7] 周维虎,费业泰,李百源,等.激光跟踪仪几何误差修正.仪器仪表学报,2002,23(1):56-63.
[8] BARONTI F,LAZZERI A,RONCELLA R,et al.FPGA/DSP-based implementation of a high-performance multi-channel counter.Journal of System Architecture,2009,55(10):310-316.
[9] 宋殿友.精密PSD微位移在线测量技术的研究与应用:[学位论文].天津:天津大学,2012.
[10] IQBAL S,GUALINI M M S,ASUNDI A.Measurement accuracy of lateral-effect.position-sensitive devices in presence of stray illumination noise.Sensors and Actuators A,2008,143 :286-292.
Application and Research of Laser Tracker’s Optoelectronic Aiming Technology Based on PSD
LIU Jiao-yue1,YANG Ju-qing2,3,DONG Deng-feng3
(1.Henan Polytechnical Institute,Nanyang 473009,China;2.Collage of Applied Science,Beijing University of Technology,Beijing 100124,China.3.Academy of Opto-Electronics,Chinese Academy of Science,Beijing 100094,China)
Optoelectronic aiming and positioning technology is the key technology of space moving target’s dynamic tracking measurement,it plays a role of target acquisition and motion position deviation’s accurate aiming.Laser tracker’s optoelectronic aiming and target control scheme were analyzed and designed based on photoelectric position sensor (PSD),optoelectronic aiming control scheme was presented,detection optical path was designed,and PSD error correction and signal processing were analyzed.Through actual prototype tests,system’s static positioning measurement precision reached 6?m,and the stochastic dynamic tracking measurement speed was greater than 1 m/s.
optoelectronic aiming;PSD;optical route detecting
国家重大科学仪器设备开发专项(2011YQ120022);中国科学院科研装备研制项目(090206A01Y);北京工业大学研究生科技基金项目(ykj-2014-11443)
2014-12-27
2015-03-05
TP273
A
1002-1841(2015)07-0098-03
刘娇月(1974—),副教授,硕士,主要研究方向为精密仪器、机电一体化技术及应用等。E-mail:15838706952@139.com 杨聚庆(1972—),副教授,在读博士,主要研究方向为光电检测与控制及激光跟踪测量技术等。E-mail:nyyjq@139.com
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
哈尔滨轴承(2020年2期)2020-11-06
今日中国·法文版(2020年7期)2020-07-04
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
小哥白尼(趣味科学)(2019年2期)2019-04-17
中国特种设备安全(2019年1期)2019-03-13
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24