
网络联盟环境下可重构测试平台优化配置设计
2015-06-07 11:01:36马丽梅李国岫赵力行
仪表技术与传感器 2015年4期
马丽梅,李国岫,赵力行
(1.北京交通大学机械与电子控制工程学院,北京 100044; 2. 北京自动化技术研究院,北京 100009)
网络联盟环境下可重构测试平台优化配置设计
马丽梅1,2,李国岫1,赵力行2
(1.北京交通大学机械与电子控制工程学院,北京 100044; 2. 北京自动化技术研究院,北京 100009)
可重构测试平台(Reconfigurable Test Platform, RTP)是用来对机械手的关键性能指标(如定位精度、速度等)进行检验的设备,其成功应用依赖于网络联盟(NA)环境下机械模块资源的低成本、高质量及快速地获取。NA内RTP优化配置设计是指从联盟内盟员企业中依据加工任务与机械模块的约束规则选择模块资源,从而形成RTP配置所需的机械模块组合路径集合,进而对该集合进行评估、优选的过程。首先对RTP配置问题进行定义与描述,建立了基于层次网络的RTP机械模块选择模型。提出了基于模块选择约束的可行的模块组合路径生成方法,及其联盟环境下模块资源的定性与定量相结合的评价指标的统一的量化方法,并依据各指标值对组合路径容量的影响将指标分为动态、静态两类指标,基于此提出了组合路径容量的计算方法,获得了RTP机械模块的p个较优的组合方案。最后用实例验证了方法的有效性与可行性。
可重构测试平台;层次网络;模块选择;关联度;路径容量;网络联盟
0 引言
可重构测试平台(Reconfigurable Test Platform,RTP)是由一定的机械模块组成的配置状态来完成机械手的关键性能指标(如定位精度、速度)测试的设备[1]。不同的机械模块具有不同的功能。现有的可重构设备研究都是基于机械模块的即用即得模式,而没有考虑模块的获取方式及其获取成本[2-3]。而可重构测试平台的成功应用依赖于网络联盟(Network Alliance,NA)环境下机械模块资源的低成本、高质量及快速地获取[4]。联盟内模块的评估、优选不仅与模块本体的性能有关,还受到联盟相关性能指标的影响[5];对资源模块进行优化组合,是一个多层次多目标优化的问题[6]。
NA环境下RTP优化配置设计,是指从联盟内盟员企业中依据加工任务与机械模块的映射规则选择模块资源从而形成机床的机械模块集合,在此基础上,形成RTP配置所需的机械模块组合路径集合,进而对该集合进行评估、排序、优选的过程。本文研究了一系统的网络联盟环境下RTP优化配置的模块资源选择方法,提出了联盟环境下模块资源的定性与定量相结合的评价指标体系及其各指标的定量化分析方法,并研究了基于图论算法的资源路径优选算法,并通过一实例对该方法进行了验证与说明。
1 NA环境下RTP优化配置问题描述
1.1 RTP优化配置模型
影响网络联盟环境下RTP优化配置的因素主要包括测试平台的功能细分、组成设备的机械模块及其模块资源在联盟盟员内的分布。功能细分是指RTP的单个功能,每个功能对1个或多个机械模块。RTP配置设计的基础是寻找满足RTP对应每个功能组(Module Function Family,MFF), {MFFlk}(表示测试平台l的第k个功能组)内符合功能需求的机械模块集合(Mechanical Module Set,MMS)。
形成RTP配置的机械模块是从每个MMSlkr中选择其中的1个元素,形成具有r个模块元素的集合,该集合为RTP配置的一个机械模块组合(Mechanical Module Combination,MMC)方案,定义如式(1)、式(2)所示。
(1)
(2)
式中:MMClk是MFFlk需求的RTP配置组合方案集合;MMClkx为第x个测试平台配置方案;MCn定义为测试平台中的机械模块。
1.2 机械模块选择模式
依据测试平台的功能组MFFlk所必须的功能,以及机械模块的功能定义,可以从联盟内选择所需的模块。RTP的所有机械模块是相互影响的,这是由模块之间的连接关系及其连接性能决定的。依据功能需求对实体机械模块进行选择时,可以将其分为一对一、多对一、一对多3种模式选择方法,本文只对第一种模式进行了研究。
2 模块选择模型的建立
2.1 层次网络
网络(Network)是具有特殊性质的有向图D(V,E),与有向图[7]相比,网络规定了源(发点)和汇(收点),并且每条弧(或有向边)上都赋予了非负数权的赋权有向图,其中该有向图为网络N的基础有向图。对于每条弧e,定义c(e)为边的容量,其中c(e)≥0。
分层网络(Layered Network,LN)[8]是具有下列性质的网络N=(V,E,c):
(2)E中的每一条弧是从某一层Vi到下一层Vi+1,其中0≤i≤k。
2.2 模块选择层次网络模型的建立
依据功能划分方法,可重构测试平台划分以下几类基本机械模块,包括主轴(spindle)、滑台(slide)、十字滑台(cross-slide)、旋转滑台(swivel slide)、立柱(column)、工作台(table)、底座(base)及其组合等模块[9]。机械模块选择模型与功能需求的组合顺序及其测试平台模块的连接关系相关,本文依据测试平台的功能进行分层,依据联盟内部每种功能可选的机械模块为每层内的节点,建立模块选择层次网络(Module Selection Layered Network,MSLN)模型,如图1所示。
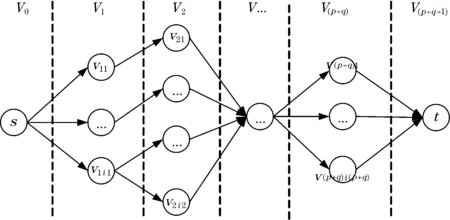
图1 模块选择层次网络MMLN模型
其中,V0={s}、Vn={t}为增加的源与收点,不具有实际意义;Vi(i=1,2,…,n-1)为功能i的节点集合,这里将V1定义为与支撑功能相关的工作台节点集合,Vp+q定义为主轴功能模块的节点集合;vij为功能i的第j个可行的机械模块。因此,功能组MFFlk的功能需求数量决定了MSLN模型的层数;联盟内满足每种功能的模块的数量决定了MSLN模型每层的子节点的数量;相邻层节点之间的连接方向是由离源节点s近的层指向离收点t近的层;而相邻层节点的连接关系不仅由模块之间的连接关系决定,还有模块的选择模式所决定的。为了对节点的连接关系约束进行定义,本文将相邻层中离源s近的层称为相邻层中的上层,反之成为下层,其相关约束如下:
约束1:如果上、下层之间的两节点表示相同的模块,则这2个节点之间没有连接关系,相邻节点中相同的节点没有连接关系;
约束2:若两相邻节点表示的模块之间没有连接关系,但上层节点与之间几层的中与下层相同节点的模块之间有连接关系,择该2个相邻节点之间存在连接关系;
约束3:如两相邻节点所代表的模块之间存在连接关系,则两节点之间存在连接关系。
模块选择层次网络模型的路径数量可以通过该层次网络模型中节点的出度或入度获取,以节点的出度为例,节点的出度每增加1,路径的数量也增加1,因此,路径数量的计算方法如式(3)所示。
(3)

3 机械模块组合路径的优选
3.1 模块组合路径的生成
对于一对一的模块选择模式,每个模块只有1种功能,在MSLN模型中选择路径时需要满足在以下约束:
(1)在每层的节点中必须选择而且只能选择1个节点;
(2)在所有层的节点,相同的模块只能选择1次。
模块选择层次MSLN模型中包含上述3种模块选择模式的所有路径。对于第1种一对一的模块选择模型,需要删除模型中不满足一对一约束的路径,即删除路径中具有相同种类模块的路径,形成适合第1种选择模式的机械模块组合路径MMCP集合,即可行的模块选择层次网络(Feasible Module Layered Network,FMLN)模型,其生成算法步骤如下:
(1) 以MMLN模型为输入寻找MSLN模型的所有路径,定义为集合MSLNF={fms}(ms=1,2,..,n),定义可行的模块组合路径结合MMCP=∅;
(2) 从集合MSLNF中选择第一条路径f1
If 路径中存在2个或2个以上相同的模块节点,从MSLNF集合中删除该路径
Else从MSLNF集合中删除该路径,将该路径写入集合MMCP中;
(3) 检查集合MSLNF是否为∅
If MSLNF≠∅,转向步骤(1)
Else 输出MMCP={fy}(y=1,2,…,n),n为可行路径的数目,结束。
3.2 评价指标的统一量化方法
NA环境下RTP预配置评价是基于机械模块进行的,涉及多方面的因素,包括定性的、定量的,也可包括直接的、间接的等。为了对便于各指标权重的计算,本文开发了基于AHP[10]方法的工具进行指标相对重要程度,即权重的计算,利用关联函数[11]方法对各指标建立了统一的量化方法。该工具包括准则层的选择与输入、子准则的输入、各准则相对重要性的输入及其权重计算等模块,在权重计算方法中采用了成对比较法、权重均等、输入其他等3种方法。如图2所示为权重计算结果为采用权重均等方法所进行的实例分析。

图2 AHP计算工具实例分析图
对于多指标评价体系,不同的指标要求不一样,比如误差越小越好,成本要求越低越好,性价比要求越大越好,安装时间越小越好等,根据各指标的优化目标可以指标分为4类:目标最小化、最大化、均值最优及其特定期望值。根据最优点的不同,关联函数也有不同。另外,根据指标值表示方法的不同,如采用模糊数、区间等,关联函数也有不同的定义,如下:
定义第i个评价对象的第j个指标为cij,其指标值vij的定义有2种情况:
(1)vij=xij,为一实数;
(2)vij=[aij,bij],为一区间。
对于第一种情况,定义aj=min(xij)为所有指标值中的最小值,bj=max(xij)为所有指标值中的最大值;对于第2种情况,定义aj=(aij),bj=(bij)。该指标的最优点mj的计算方法如式(4)所示:
(4)
当vij=xij时,其评价对象的指标值形成一区间[aj,bj],评价对象在集合中的性能可以通过评价一个点与一个区间的关联度来判断。该关联度可以如式(5)的简单关联函数来计算。
(5)
多指标下的关联度计算方法见式(6),wj为各指标的权重,uij的值越大说明该方案越好。
(6)
3.3 组合路径容量的求解
模块组合路径是由路径中的节点及其节点直接的连接关系决定的,每个节点代表1个功能模块,路径的容量是由节点模块的各指标值决定的。各指标的量值对路径的容量影响如下:
(1)当路径中节点增加时,与机械模块相关的指标量值累加,其量值增加;
(2)当路径节点增加时,与联盟相关的指标量值对路径容量的影响与节点模块所述的盟员企业相关。
如果该节点模块所属联盟企业与路径中的前几个节点模块所属企相同,在依据其指标量值累加的基础上,路径容量会有一增益,以表明该路径的优越性;如果该节点模块所属企业与前几个节点模块所属企业均不同,则路径容量的增加等于其指标值的累加。因此,本文将与预配置资源相同的评价指标分为两类:静态指标与动态指标。静态指标即其指标值对路径容量的影响与该路径无关,反之,动态指标对路径容量的影响与不同的路径相关。路径容量的计算方法如式(7)、式(8)所示。
(7)
(8)

从路径节点递增的角度去计算路径的容量,在确定每个节点的动态指标值时,需要判断与前几个节点的关系,其时间复杂度为n2,显然这样是不合理的。分析一下该过程,许多判断是不必要的,为了避免浪费,本文设定一个数组,如式(11)所示,其中,fy为组合路径编号,yi为路径中的第i层节点所属的盟员企业,在此,所述企业用A、B、C等英文字母依次按顺序表示,每个字母代表不同的盟员企业。如果(y1,y2,…,yi,…,yp+q)中存在相同的元素,则该路径的容量会产生一个增益,计算方法如式(9)~式(12)所示。
Opt=[fy,(y1,y2,…,yi,…,yp+q)]
(9)
(10)
(11)
(12)

3.3 组合路径的优选
网络联盟环境下RTP预配置组合路径的优选,是从所有可行的路径中依据组合路径的容量Cfy从大到小排序,选择P个较优路径的过程。为了对路径的容量进行比较,本文引入一评价因子α,用来评价各路径容量的相对大小,如式(13)所示。组合路径的优选问题就转化为选择p个最大的评价因子的组合路径的过程。
(13)
式中:αfy为组合路径容量的评价因子;Y为组合路径的总数量。
4 实例分析
本文以测试平台的功能需求{WT、XT、YT、ZT、YR、Spindle}为例,在以盟员企业A、B、C、D4个企业组成的联盟中进行RTP预配置方案的优选。将与机械模块相关的模块成本、功能匹配度及其与联盟相关的运输距离、发货准时性等作为模块选择的4个最主要的评价指标,模块组合路径的容量也是由这四部分组成的。其中,模块成本、功能匹配度、运输距离及其发货准时性分别记为cost、fun-match、dist、on-time,为机械模块资源的各指标值,各指标的权重为{0.30,0.35,0.15.0.20}。模块节点的4个指标值分别记为kcij、kfij、kdij及ktij,其各自的关联度如表1所示。

表1 FMLN中各节点模块的关联度
如表2所示,选取αfy=0.011,选取了9个较优的组合路径,表中第1列为路径的编号,第2列到第7列为每层下的模块及路径所包含的机械模块及模块的组合顺序,Cfy为该路径的容量,α为该路径的评价因子。

表2 9个较优的RTP预配置模块组合路径
5 结论
(1) 定义了NA环境下RTP优化配置设计的概念,对其过程进行了描述建模,并对模块的选择模式进行了分析。
(2) 基于RTP预配置问题描述,建立了基于图论的模块选择层次网络模型,基于该模型生成了一对一模块选择模式的可行的模块组合路径。
(3) 提出了基于关联函数的统一的量化方法,基于该量值及其各指标对组合路径容量的影响,提出路径容量的计算方法,获取了9个较优的RTP预配置模块组合方案,为RTP配置优化建立了基础。
[1] CARLES R R,ROBERTOPR,HORACIO A G,Cooperative Design, Visualization and Engineering.Springer Berlin Heidelberg,2011: 234-241.
[2] CHEN L, XI F, MACWAN A. Optimal module selection for preliminary design of reconfigurable machine tools. Journal of Manufacturing Science and Engineering, Transactions of the ASME, 2010, 127(1): 104-115.
[3] MA L M,LI J Y,XU W S, et al. Network alliance for the total life cycle of reconfigurable machine tool.2011 International Conference on Management Science and Industrial Engineering (MSIE),Harbin,2011.
[4] LIU W. A multi-objective approach for RMT design. Ottawa: University of Ottawa, 2006.
[5] 甘屹,齐从谦,杜继涛. 基于蚁群算法的动态联盟伙伴选择研究. 系统仿真学报,2012, 18(2): 517-520.
[6] 王友钊,彭宇翔,潘芬兰. 基于贪心算法和遗传算法的仓储车辆调度算法. 传感器与微系统,2012, 31(10): 125-128.
[7] 汪云飞,毕笃彦,马和平.一种基于图论的自适应滤波算法.中南大学学报(自然科学版),2013,44(10):4117-4123.
[8] 王海英,黄强,李传涛,等. 图论算法及其MATLAB实现. 北京: 北京航空航天大学出版社, 2010.
[9] ITO Y. Modular Design of Machine Tools.New York:McGraw-Hill Companies, 2007.
[10] 刘增华,于洪涛,蔡小明,等. 用于结构健康监测的无线智能机电阻抗传感器.仪表技术与传感器,2013,8(3):112-114.
[11] 李文强,孙文磊,熊艳. 多层次可拓物元基因概念设计方法的研究. 计算机应用研究,2012, 25(2): 414-416.
Optimal Configuration Design of Reconfigurable Test Platform in Network Alliance
MA Li-mei1,2,LI Guo-xiu1,ZHAO Li-xing2
(1.School of Mechanical,Electronic and Control Engineering,Beijing Jiaotong University,Beijing 100044,China; 2.Beijing Automation Technical Research Institute,Beijing 100009,China )
The successful application of Reconfigurable Test Platform (RTP) resting on a proper set of machine modules available with low cost,high quality and fast delivery in the network alliance (NA),is a test equipment used for detecting key performance indicators such as positioning accuracy,speed and other key indicators of the manipulator.The preliminary configuration of RTP in NA is the process of selection of mechanical modules from leaguers according to the constrain rules between machining tasks and mechanical modules,and forming combination paths of RTP configuration and the evaluation and optimal selection of these paths.In this paper,first,the problem of preliminary configuration of RTP was defined and described,and a RTP mechanical module selection model method using layered network was constructed.Then,according to module selection constrains,feasible module selection path set was generated.To calculate the path capacity,a uniform quantitative measurement method was proposed,and module evaluation indexs were classified to static,dynamic indicator according to their influence to the path capacity,and then the P-best combination schemes of RTP configuration were obtained.Finally,a case study was given to illustrate the effectiveness and feasibility of the proposed method.
Reconfigurable Test Platform; layered network; module selection; dependent degree; path capacity;network alliance
MMClk={MMClkx},l,k,x∈N
MMClkx={MC1,MC2,…,MCn},n∈N
北京市博士后工作经费资助项目(2014ZZ-42)
2014-06-18 收修改稿日期:2014-11-15
TH122;TP391
A
1002-1841(2015)04-0107-04
马丽梅(1982—),博士后,主要从事检测技术及自动化装置研究。E-mail:zkymalm@163.com 李国岫(1970—),教授,博士生导师,主要从事内燃机燃烧理论与技术、电子控制研究。
猜你喜欢
当代工人(2020年8期)2020-05-25 09:07:38
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
进出口经理人(2017年5期)2017-07-07 13:19:11
兵器装备工程学报(2017年4期)2017-04-28 01:12:36
科技知识动漫(2016年8期)2016-07-29 20:40:09
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49
电源技术(2015年12期)2015-08-21 08:58:20
风能(2015年8期)2015-02-27 10:15:12
风能(2015年5期)2015-02-27 10:14:46
地方财政研究(2014年12期)2014-03-19 07:30:22
