基于水听器的灌装溶液杂质在线声波检测技术研究
2015-06-07 11:01耿春明汤小龙
仪表技术与传感器 2015年4期
耿春明,汤小龙
(北京航空航天大学机械工程及自动化学院,北京 100191)
基于水听器的灌装溶液杂质在线声波检测技术研究
耿春明,汤小龙
(北京航空航天大学机械工程及自动化学院,北京 100191)
为了实现工业生产流水线中灌装溶液杂质的在线检测,提高生产检测效率,文中着重研究了基于水听器传感器的在线声波检测技术。通过分析比较在有无固体异物杂质颗粒时灌装容器内的声场频谱分布情况,利用等级相似性系数来定性地判定容器内溶液的杂质颗粒有无情况。采用水听器作为收集容器内声场数据的传感器,具有体积小、线性工作频率范围宽和无水平指向性等特点。主要步骤有水听器采集声场数据、信号滤波放大、数据采集和FFT数据处理等。通过试验得出结论,容器内的固体异物杂质颗粒在溶液中的声场频谱分布中的特征频段范围是15~26.8 kHz。
水听器;杂质声波检测技术;频谱分布;FFT;等级相似性
0 引言
酒类、饮料、医药、食品等制造行业在生产中大量采用了自动灌装生产线,灌装的最后环节的异物颗粒杂质在线检测方法虽然包括电阻法、光散射法、光衍射法、光阻法等自动化检测方法[1]和人工灯检法等检测手段[2],也用了不同种类的电学和光学传感器,但这些方法都各有缺陷。
水听器作为一种声压传感器,能够将水下的声信号转变成电信号。Rustam Stolkin等通过研究发现,不同类型的水下生物、测量系统和机械结构都会发出各自特有的高频声音信号[3],并研究了如何从带有复杂背景噪声的水听器信号中提取特征信号以完成不同类型的识别和检测。由于水听器能够检测到不同相之间的耦合作用以及多相体系与探头之间的相互作用[4],本课题就使用水听器作为声压传感器,着重研究了在线声波检测技术。
1 试验原理、试验装置和试验方法
1.1 试验原理
该声波检测系统主要由传感器数据采集、信号滤波、放大、数据采集和数据处理5大部分组成,如图1所示。

图1 声波检测系统工作原理示意图
试验中采用的水听器是一种能够将水下声信号转换为电压信号的声压换能传感器,外形尺寸仅为Φ10 mm×50 mm,电压灵敏度为-217 dB,工作频率为20Hz~160 kHz,线性工作频率为1~100 kHz。在没有激振装置的激励情况下,水听器本身的输出正弦信号电压范围大约在-5~5 mV之间。这是由于外部50 Hz交流电系统干扰产生的无用信号,在带通滤波器中会被滤除掉。在激振装置的激励作用下,水听器搜集到容器内部声场产生的信号幅值在50~100 mV之间,灵敏度相对较低,相对于数据采集系统的输入信号电压量程-10~10 V过于微弱,因此信号需要放大20 dB至40 dB。在有无异物杂质颗粒的情况下,采集容器内部声场数据,经过FFT处理后,即可得到其频谱分布图。
声场数据经过傅里叶变换之后,横坐标即为分离出的正弦信号分信号相对应的频率,单位是Hz,纵坐标对应的是加权密度,单位为1,值的大小表示其在原始信号中的概率密度。若数据采集系统的采集频率为Fs,采集点数为N,则频谱图上的频谱分辨率F如公式(1)所示[5]。
F=Fs/N
(1)
因此,在频谱图上横坐标第n点所表示的特征信号频率Fn如式(2)所示:
Fn=(n-1)·Fs/N
(2)
傅里叶变换是建立了以时间为自变量的信号和以频率为自变量的频谱函数之间的关系[6],将原来难以处理的时域信号转换成了易于分析的频域信号,并对这些频域信号进行处理。在文献6中用特定的传感器测得汽车发动机的振动和噪声信号,通过分析振动信号的频谱得知当排气门间隙过大时,在8~18 kHz范围之间的高频成分明显增加。本研究课题也是建立在分析容器内声场数据的频谱图的基础之上的。
1.2 试验装置
该试验装置的示意图如图2所示,主要由灌装容器和激振装置2部分组成。在图2(d)中,灌装容器的直径a=100 mm,高度b=145 mm,激振装置的立柱高度g=80 mm,击柱的高度f=70 mm,击柱的高度可沿着立柱上下滑动调节;图2(c)中,c和d分别表示击柱中心距离灌装容器中心在水平和竖直方向上的距离,在本文两者的距离分别是5 mm和100 mm。图2(a)、图2(b)和图2(c)分别是激振装置的起始位置、激振位置和返回平衡位置。

(a)激振装置的起始位置 (b)激振位置
(c)返回平衡位置 (d)激振试验装置
1.3 试验方法
激振装置立柱上有3层板,上层板、中层板和下层板,击柱固定在中层板上,中层板和下层板在立柱的两侧分别连接一拉簧。在起始位置,击柱被定位销固定在上层板上,将定位销拔出的同时,击柱在弹簧的拉力作用下,击柱敲击容器,之后在弹簧的拉力作用下,击柱返回至平衡位置,一次激振就结束。在激振的同时,容器内的水听器采集到内部声场数据并输出。
在本文中,灌装容器为玻璃材质,击柱为铝合金材质,在起始位置上,金属击柱与底座之间的夹角f=45°。文献[4]中的试验方法是在搅拌釜中设计1个搅拌器,在设定搅拌转速和功率之后在搅拌釜内产生1个内部声场以供研究。
2 灌装容器固有振动模态仿真和声场数据分析
2.1 水听器静态特征分析
在无外界激振装置的作用下,将水听器的输出信号直接连接示波器并输出,将该信号以Fs=100 kHz的采集频率采集数据,采集8 192个数据后进行FFT数据处理,其时域波形图和频谱图如图3所示。由图可知该信号频率为50 Hz,幅值在±3.6 mV之间,这是由于传感器线缆较长,本身会受到50 Hz交流电干扰。
(a)输出信号波形图
(b)输出信号频谱图图3 水听器静态输出信号波形图及其频谱图
由该频谱图可知,在n=5时波形有一个明显的峰值,在其他频率上的波峰幅值基本可以忽略不计,因此由公式(2)的转换关系可知该波形信号的特征信号频率为
Fn=(n-1)·Fs/N=(5-1)×100×103/8192=49 Hz
(3)
与实际生活中的50 Hz交流电系统信号频率相合。
2.2 容器固有振动频率模态仿真分析
固有频率是机械振动系统的最主要参数之一。实际上,机械振动系统的模型是多自由度的,它有多个固有振动频率,在幅频特性曲线上会出现许多“共振峰”。一般来讲,系统的这些固有频率与激振方式、测点布置无关[7]。
频谱曲线中,振动的振幅及初相位与振动的初始条件有关,而与振动的固有周期或固有频率与初始条件无关,而与系统的固有特性有关。物体的固有振动频率与它的硬度、质量、外形尺寸有关。物体的固有振动模态和固有振动频率是一一对应的。一阶固有振动模态和一阶固有振动频率相对应,二阶固有振动模态和二阶固有振动频率相对应,依此类推。
现用软件对容器进行固有振动模态仿真分析,三维建模、载荷施加和网格划分如图4所示。
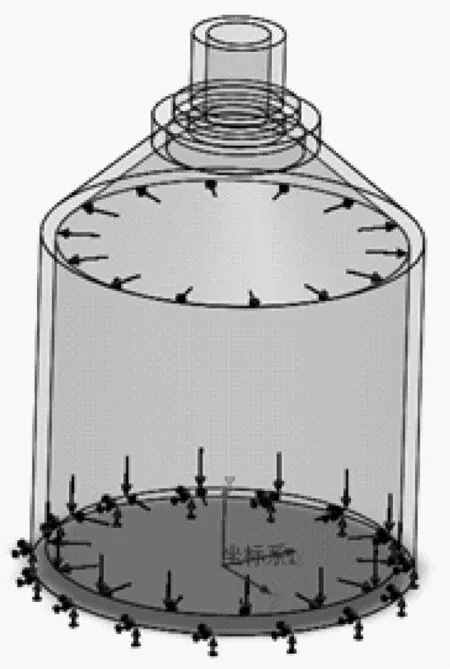
(a)容器固有振动模态仿真载荷施加示意图

(b)容器固有振动模态仿真网格划分示意图
图中,三维建模按照实物容器1∶1建模,容器外径Φ103 mm,高度为145 mm,壁厚为4 mm,容器内部溶液的高度为Φ85 mm,试验中以水溶液模拟。夹具形式为容器底部几何体固定。外部载荷主要有容器底部的均布压力和侧壁的非均布压力。容器底部均布压力压强大小如公式4所示,侧壁非均布压力底部最大压强为8.3×102Pa,溶液表面的压强为0 Pa,两者之间为线性分布。
P=ρgh=1.0×103×9.8×0.085=8.3×102Pa
(4)
软件仿真中设置属性频率数为10,使用自动解算器,仿真结果如表1所示。表中列“频谱波形对应频率(Hz)”是将表中列“频率(Hz)”利用公式(2)反向推导得到,该频率与水听器激振输出信号的频谱曲线中的频率相对应。

表1 容器固有振动模态仿真分析结果
2.3 水听器激振输出信号分析
将试验装置放置在金属平板上进行试验,试验中以直径大小不一的玻璃球为固体异物颗粒,在分别不放置异物颗粒和放置异物颗粒的情况下分别进行试验,采集容器内声场数据信号,经过滤波放大后采集声场数据,利用FFT数据处理得到声场的频谱特性曲线。
试验中观察发现,在激振装置的定位销拔出、击柱敲击容器后,容器内的声场信号持续100 ms之后便衰减至没有激振时的幅值大小,在这100 ms内数据采集系统采集到的有效数据个数如式(5)所示。
N=100÷1 000×100×103=104
(5)
由于在基于频域抽取的基-2FFT算法或者基于时域抽取的基-2FFT算法中都要求所要计算的数据个数为2的整数次幂,因此从数据采集系统采集到的数据中截取8 192个有效数据,即213。
由此得到在本文中,数据采集频率为100 kHz,采集时间为100 ms,截取的有效数据个数为8 192个。分别采集多组无异物杂质颗粒和有异物杂质颗粒时的声场数据并进行FFT处理,得到多组频谱曲线图,图5为部分试验结果。
由图5可知,无论是在有无固体异物颗粒的情况下,频谱曲线中第一个峰值都出现在275 Hz附近,在502 Hz附近都有一个最大峰值。此外,在频谱波形中630 Hz附近也有较小的波峰值,这与表1容器固有振动模态仿真分析结果相符合。此外,在表1列“频谱波形对应频率(Hz)”中的频率都可以在频谱波形中找到对应的峰值。

(a)第一组无异物杂质颗粒的频谱特性曲线
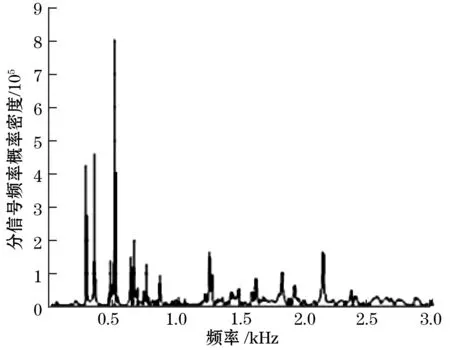
(b)第一组有异物杂质颗粒的频谱特性曲线
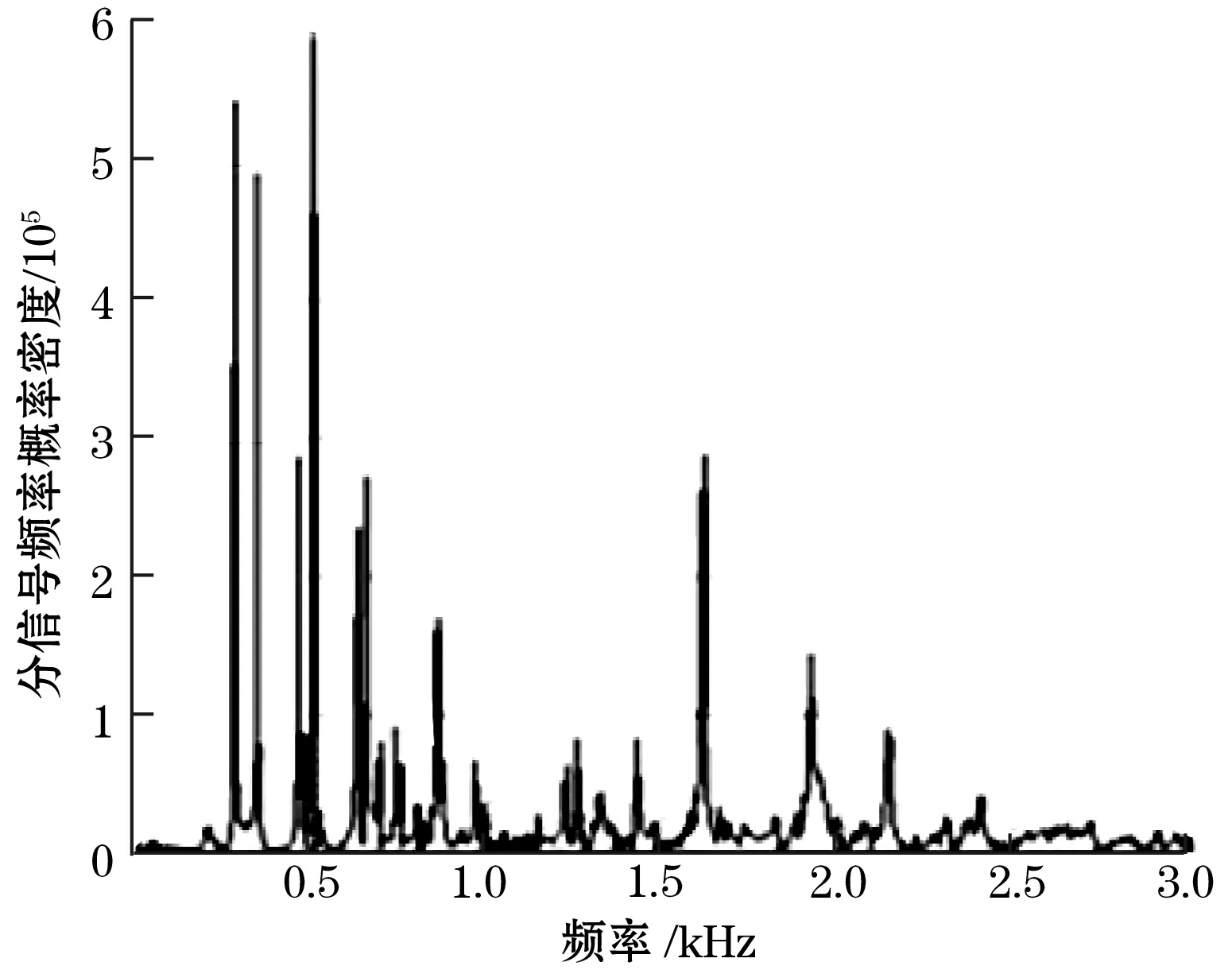
(c)第二组无异物杂质颗粒的频谱特性曲线

(d)第二组有异物杂质颗粒的频谱特性曲线图5 2组无异物杂质颗粒和相对应的有异物杂质颗粒的频谱特性曲线
2.4 Spearman等级相似性系数
将已经求得的容器内无异物杂质颗粒和有异物杂质颗粒时的声场频谱数据分别定义为变量X和变量Y。在对两个变量(X,Y)进行相关性分析时,若数据资料不呈正态分布、总体分布类型未知或为有序分类数据资料时,应该用基于秩次的非参数统计方法—Spearman等级相关性。当X和Y中的相同秩次较多时,等级相似性系数的计算公式如式(6)所示。
(6)
式中:n为要比较数据的个数;tx和ty为变量X和变量Y中有相同秩次的数据个数。
当系数为1时,变量Y和变量X之间有严格的单调递增关系。当系数为-1时,变量Y和变量X之间有严格的单调递减关系。
在本文中,先测得灌装容器中没有异物杂质颗粒时的频谱数据,作为被比较的标准频谱数据,再分别测得10组无异物杂质颗粒和有异物杂质颗粒时的频谱数据,分别与标准频谱数据比较,根据式(6)计算等级相似性系数r,如表2所示。在该表中,从第1次试验到第10次试验为第一组试验,以第1次测得的没有异物杂质颗粒时的频谱数据为标准频谱数据,所以该数据和自身比较的等级相似性为1。

表2 有无异物杂质颗粒频谱数据等级相似性系数表
重新放置固体异物杂质颗粒,进行第2组实验。在第1次无异物杂质颗粒存在时,等级相似性系数同样为1。再将该表制成折线图,如图6所示。其中前10组数据对应第一组试验数据,后10组数据对应第二组试验。

图6 有无异物颗粒频谱数据等级相似系数比较折线图
3 结论
对比图5中无异物颗粒和有异物颗粒的声场频谱特性曲线和有无固体异物杂质颗粒频谱数据折线图,根据式(2)的转换关系可知:
(1)在250~750 Hz的低频区,即3~9.1 kHz的特征频率分布范围内,有无异物颗粒时,容器内声场的频率分布基本一致,对于水听器接收到的信号影响不大,这是由于该段频率范围内的频率是玻璃容器被金属击柱激振时产生的固有频率,容器内是否有异物颗粒对该段频率分布影响不大;
(2)在1 250~2 200 Hz的高频区,即15~26.8 kHz的特征频率分布范围内,有异物颗粒时,容器内水听器信号频谱数据波峰值有明显的变化,2组数据等级相似性系数都在0.60左右,等级相似性系数明显小于没有异物杂质颗粒的频谱数据。因此,该段频率是固体异物颗粒杂质在容器内的特征频段,通过对比容器内声场频谱曲线中的该段频率分布情况,可以间接判断容器内的异物杂质颗粒含量情况;
(3)在其他频率范围内,有无异物颗粒时,容器内声场的频谱曲线基本一致,对于水听器接收到的信号影响不大。
[1] 张志军.光阻法颗粒计数器研究及其软件系统设计:[学位论文].沈阳:沈阳农业大学,2006.
[2] 刘焕军.灌装自动化生产线上视觉检测机器人研究:[学位论文].长沙:湖南大学,2007.
[3] STOLKIN R,RADHARKISHNAN S,SUTIN A.Passive acoustic detection of modulated underwater sounds from biological and anthropogenic sources.Vancouver,BC:OCEANS 2007,2007:1-8.
[4] 阳永荣,胡雨晨,王靖岱,等.多相体系中固含率的水听器检测.北京理工大学学报(自然科学版),2011,31(12):1461-1465.
[5] 赵春晖,陈立伟,马惠珠,等.数字信号处理技术.2版.北京:电子工业出版社,2011:120-125.
[6] 徐科军,全书海,王建华,等.信号处理技术.武汉:武汉理工大学出版社,2011:54-111.
[7] 江征风,赵燕,徐汉斌,等.测试技术基础.北京:北京大学出版社,2007:237-243.
[8] 何艳频,孙爱峰.Spearman等级相关系数计算公式及其相互关系的探讨.中国现代药物应用,2007,1(7):72-73.
Research of New Online Acoustic Detection Technology of Filling Solution Impurities Based on Hydrophone
GENG Chun-ming ,TANG Xiao-long
(College of Mechanical Engineering and Automation, Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
In order to achieve the goal of online impurity detection of filling solution in industrial production and improve production efficiency,the paper focused on the new technology of online acoustic detection.Through the analysis of the sound field spectral distribution in the filling container with and without solid particle impurities,whether there were impurities in the filling container could be determined qualitatively by comparing the data similarity.Hydrophone,with small size,wide range of linear operational frequency and non-horizontal directivity,was used in the experiment as a sensor to collect sound field data in the container.The main steps of the experiment were sound field data acquisition,the filtering and amplification of the signal,data acquisition and FFT data processing.Through the experiments,it can be concluded that the characteristic frequency of solid particle impurities in the solution within the container is from 15 kHz to 26.8 kHz.
hydrophone; impurity acoustic detection technology; spectral distribution; FFT; data similarity
2014-03-25 收修改稿日期:2014-11-06
TH39
A
1002-1841(2015)04-0079-05
耿春明(1964—),副教授,博士后,从事固体质量流量测量、非接触光电测量及机电一体化等方向的研究工作。 E-mail:gengcm@buaa.edu.cn 汤小龙(1988—),硕士研究生,主要研究领域为工业检测和机电一体化等。E-mail:txiaolongtxl@sina.com
猜你喜欢
电声技术(2022年3期)2022-04-28
中老年保健(2021年9期)2021-08-24
小雪花·成长指南(2021年6期)2021-08-18
昆明医科大学学报(2020年12期)2021-01-26
装备制造技术(2020年4期)2020-12-25
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
家庭影院技术(2018年11期)2019-01-21
舰船电子工程(2015年4期)2015-03-15