基于单片机控制太阳能智能跟踪控制系统的设计
2015-06-07 11:01李仁浩龚思敏李小兵
仪表技术与传感器 2015年4期
李仁浩,龚思敏,杨 帆,刘 松,李小兵
(1.南昌大学机电工程学院,江西南昌 330031;2.南昌大学信息工程学院,江西南昌 330031)
基于单片机控制太阳能智能跟踪控制系统的设计
李仁浩1,龚思敏2,杨 帆1,刘 松1,李小兵1
(1.南昌大学机电工程学院,江西南昌 330031;2.南昌大学信息工程学院,江西南昌 330031)
基于MC9S12XS128单片机,采用光电跟踪原理和传感器定位跟踪方式,设计高精度太阳智能跟踪系统。控制系统包括LCD显示模块、实时时钟模块、光电传感器模块、风力传感模块、无线通信模块、液压驱动模块等。该系统通过人工智能和自动化控制,实现全景式、稳定、准确的自动追踪。该太阳能跟踪系统结构简单、价格低廉、功能全面、系统稳定以及具有自我保护功能,既可以保证系统追光的精确性,又可以满足不同地域和环境的使用要求。
太阳能;跟踪系统;单片机控制;智能化
0 引言
随着化石燃料日益匮乏,对新型可再生能源的开发是世界各个国家迫在眉睫的工作,特别是对于太阳能这一自然能源的利用,在很多国家都已初具规模,诸如甘肃敦煌市西部的太阳能发电站,全球最大的西班牙安达索尔太阳发电站装机总容量50 MW[1]等大型发电站的建成。如此大规模的太阳能发电站,提高太阳光的追踪精度能极大地提高发电效率。
市场上为提高追踪精度普遍采用单片机控制,单片机常见的太阳能追踪系统多采用光感或者根据纬度、季节主动视日跟踪的方式[2-3],如基于PID控制的太阳能跟踪系统[4],基于西门子S7-1200PLC的双轴伺服太阳能跟踪系统[5],基于STM32的太阳自动跟踪控制系统[6],以STM32 单片机为控制核心结合光电转换装置和GPS 模块实现对太阳的精确跟踪[7]。而单一采用这两种方式的任何一种或者是二者的简单结合,都难以达到光伏系统的精度要求,在聚光发电系统中这一点尤为突出。
本文设计一种基于MC9S12XS128单片机的高精度太阳智能跟踪系统,系统采用光电跟踪原理,基于传感器定位跟踪方式,有效提高太阳能的利用率。
1 系统总体设计
MC9S12XS单片机是16位单片机,内部集成包括串口、模数转换、脉冲调制、输入捕捉等外设,通过软件设置,可以实现各种功能。同时MC9S12XS具有PLL超频功能,能得到更高的单片机处理频率。用MC9S12XS作为整个太阳能追踪系统的控制中枢,能满足复杂多变的控制要求。主要根据系统所在地的经度、纬度及实时时间,通过相应天文算法计算出太阳高度角及方位角。系统通过亮度检测判断实时天气状况,采用光电跟踪和定时跟踪相结合以及间隙工作的控制方式,通过控制水平、俯仰两个自由度的运动,以液压驱动控制调整太阳能电池板的位置,提高自动跟踪系统的跟踪精度。在系统实际开启运行后利用LCD显示器和键盘实现控制和输出显示。系统组成框图如图1所示。

图1 系统组成框图
2 硬件设计
本系统硬件主要由LCD显示模块、实时时钟模块、光电传感器模块、风力传感模块、无线通信模块、液压驱动模块等组成。
2.1 LCD显示模块
采用5110显示器来实现人机交互界面,该显示器具有价格低廉、易驱动、显示大小适中、性能稳定等优点。通过单片机引脚给不同信号,将相应字符转换成ASCLL码值,可以实现LCD显示。人机交互界面需要数据通信,按键采用轻触式按键向单片机发出一些数据信息。按键使单片机产生中断来控制LCD显示,通过按键可以输入系统运行的各个参数,并能够对系统工作模式进行切换、运动参数调试、环境参数设定。
2.2 实时时钟模块
采用DS1302芯片进行实时时钟电路设计,该芯片是一种高性能、低功耗、带RAM的实时时钟电路,可对年、月、日、时、分、秒进行记时,并且具有闰年补偿功能,工作电压为2.5~5.5 V,电路原理图如图2所示。
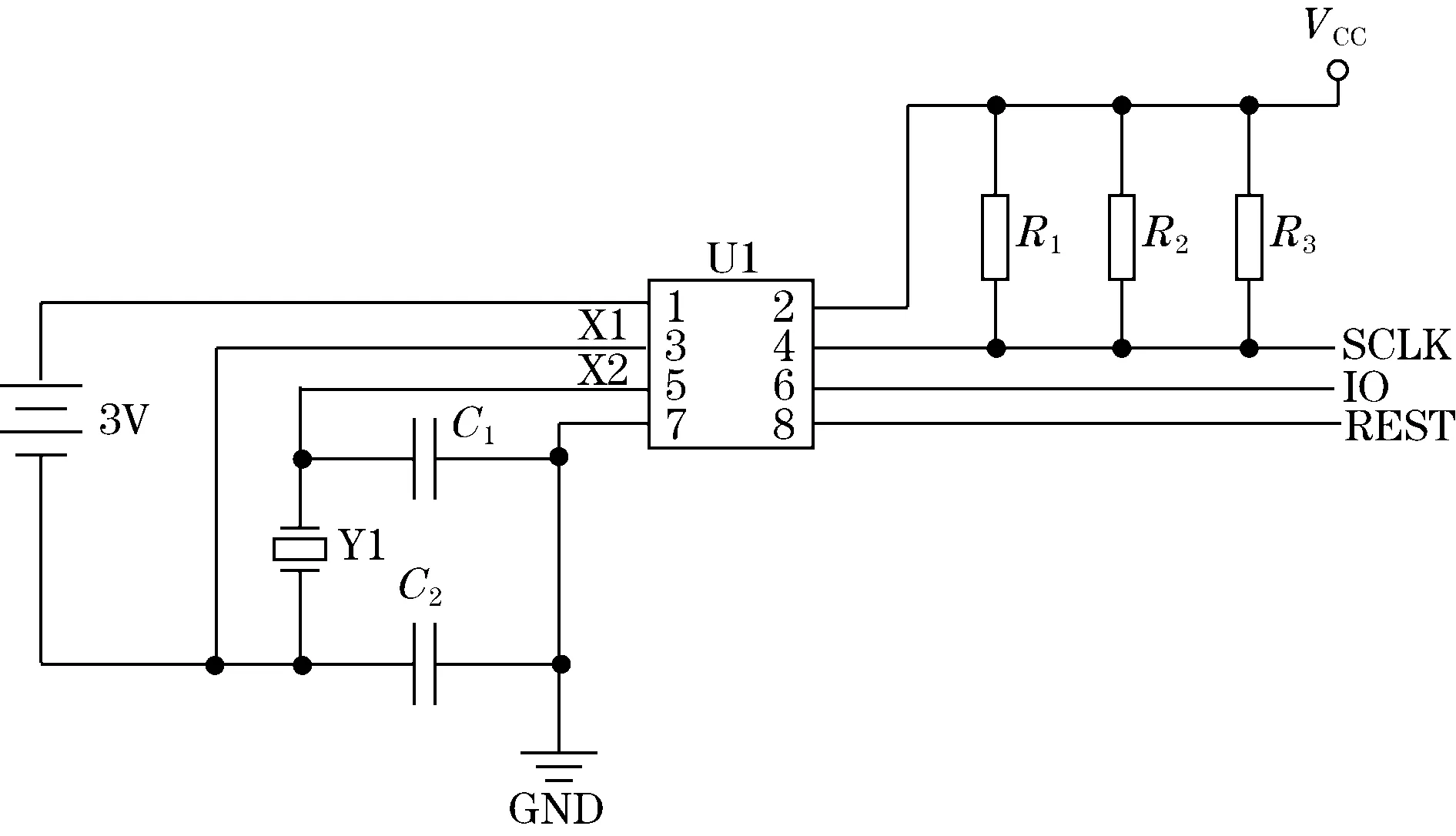
图2 时钟电路原理图
实时时钟电路由3 V电源供电,晶振Y1为32.768 kHz,接在X1和X2端口上作为基准时钟信号。REST为复位/片选信号,通过REST输入驱动置高电平启动数据传送,在VCC≥2.5 V前,REST保持低电平。SCLK为低电平时,才能将REST置为高电平。IO为串行数据输入输出端(双向)。
2.3 光电传感器模块
为了能够感知太阳方位的变化,采用光电传感器对太阳光线进行方位测量,如图3所示。在A、B、C、D端分别放置4个光敏电阻R1、R2、R3、R4,并且置A、B、C、D端为+5 V的高电位,另设E、F端与两根杆子相连,E、F为数据采集端,其中A、C杆和B、D杆不相交。用单机对E、F端进行AD8位数据模数采集,采用数字滤波方法,准确读出E、F两端电压,就能判断出太阳方位。通过如上配置,引接单片机AD通道基准电压为V1=5 V,设置采样分辨率为8位,采样最大值为255,另设采集AD值为X,可知采集点电压为V2=(X/255)×V1。读取采集电压,与设定值对比,标定出太阳光线位置。

图3 光电传感器原理图
信息处理主要原理是比较信号1、信号2 与2.5 V的大小,用4个结果来辨别当前太阳所处太阳能板的方向,然后通过单片机发出命令,驱动竖直液压电机转动,当信号1电位为2.5 V左右时,停止旋转,使太阳能板达到最佳水平入射角。然后再次比较信号2与2.5 V的大小,再使单片机发出命令驱动俯仰液压电机转动,控制太阳板俯仰,直到信号2电位为2.5 V左右为止,通过程序不断循环测定传感器上电位差的变化来实现太阳能板的位置,此时太阳能板达到最佳位置,太阳光便能垂直照射在太阳能电池板上。而以上电位信号都是由MAX232微控制器转换之后,把结果发送给单片机比较,从而识别太阳在跟踪系统所处位置。每隔1 min循环一次以上过程。
2.4 风力传感模块
为使太阳能追踪器在雷雨天气得到保护,采用风力传感器对外部环境进行实时监控,当遇到强风雷电天气时,系统自动关闭,保证整个系统安全。如图4所示,风力带动齿轮箱旋转,左侧发电机产生感应电势,再用单片机A/D模数进行采集,得到电压值,进行数据标定后,将极限值作为极限参数保存下来,若AD值超过极限标定值,则系统自动关闭。

图4 风力传感器模块
2.5 无线通信模块
为了能够实时跟踪系统,了解系统运行状态,采用无线蓝牙通信技术,利用PC机对系统关键数据进行实时通信,通过S12单片机驱动蓝牙,实现串口通信。只需要在PC端安装驱动,并插上适配器就能和单片机蓝牙进行通信。通过无线模块实现太阳能跟踪系统与后天PC机的双向数据通信,将跟踪系统的数据发送到后台PC机,管理员可在后台PC机上实时监测系统的运行状况,还能远程控制跟踪系统。
2.6 液压驱动模块
驱动系统采用液压设备,动力源为液压电机,运动系统由水平转动和竖直转动组成,水平转动的传动装置为液压马达,液压马达通过减速齿轮进行减速带动机构水平转动,竖直转动的传动为液压缸,通过两边液压缸的升降带动太阳板竖直转动。如图5所示,当系统判断装置应水平顺时针转动时,系统通过控制电磁阀4通3闭控制液压马达的旋转方向,从而控制装置顺时针转动。当系统判断太阳能板应左侧向上转动时,系统会通过控制电磁阀1通2闭来控制左侧液压缸上升右侧液压缸下降,从而实现控制太阳能板左边上升。

图5 液压驱动模块图
3 系统软件设计
3.1 MC9S12XS外设固件初始化
系统运用MC9S12XS单片机的ATD、TIM、PWM、IO等外设,编程时先对这些外设寄存器进行基本配置,配置之后就能初始化系统。其中主要包括:PLL超频设置BusCLK_80M(),采用80 MHz主频,主要设置SYNR和REFDV两个寄存器值为SYNR =0xc0 | 0x09,REFDV=0x80 | 0x01,配置之后单片机得到稳定80 MHz的工作频率。
A/D模数转换通道设置AD_Init(),其主要配置A/D采集分辨率为8位并且采样前不放电,A/D采集长度为6位和采样周期为4个周期,核心程序如下:
void AD_Init()
{ ATD0DIEN = 0x00;
ATD0CTL0 = 0x0F; //反转通道为通道0
ATD0CTL1 = 0x00; //采样前不放电,8位分辨率
ATD0CTL2 = 0x40; //快速清零,禁止外部中断
ATD0CTL3 = 0xB0; //右对齐,序列长度为6
ATD0CTL4 = 0x03; //采样时间为4个周期
ATD0CTL5 = 0x30; //扫描模式,从0通道开始
}
IO口配置IO_Init(),对液晶显示屏和拨码开关模块进行驱动要用大量IO口,因此根据实际需求合理配置IO口。
中断配置及处理,中断源包括按键中断,定时器中断和断电保护中断。按标准配置之后合理设置相关中断优先级,根据优先级系统就能处理各种复杂的实时事件,从而保证系统正常运行。
配置以上模块之后,在主函数mian()中进行集中初始化,并在主循环中进行太阳自动跟踪控制。核心程序如下:
void mian(void)
{ AD_Init(); //AD转换初始化
IO_Init(); //IO初始化
LCD_Init(); //液晶显示器初始化
BusCLK_80M(); //设置频率
Interrupt_Priority_Set();//中断设置
EnableInterrupts; //开总中断
While(1)
{Auto_follow();} //自动追踪函数
}
3.2 软件控制流程
由于太阳光线变化缓慢,为节省电量和系统稳定运行,系统500 ms采集1次数据,1 min控制一次液压机构修正。并且实时时钟模块标定数据能够对修正旋转角度进行对比,从而达到滤波作用,使控制效果更佳,控制流程图如图6。
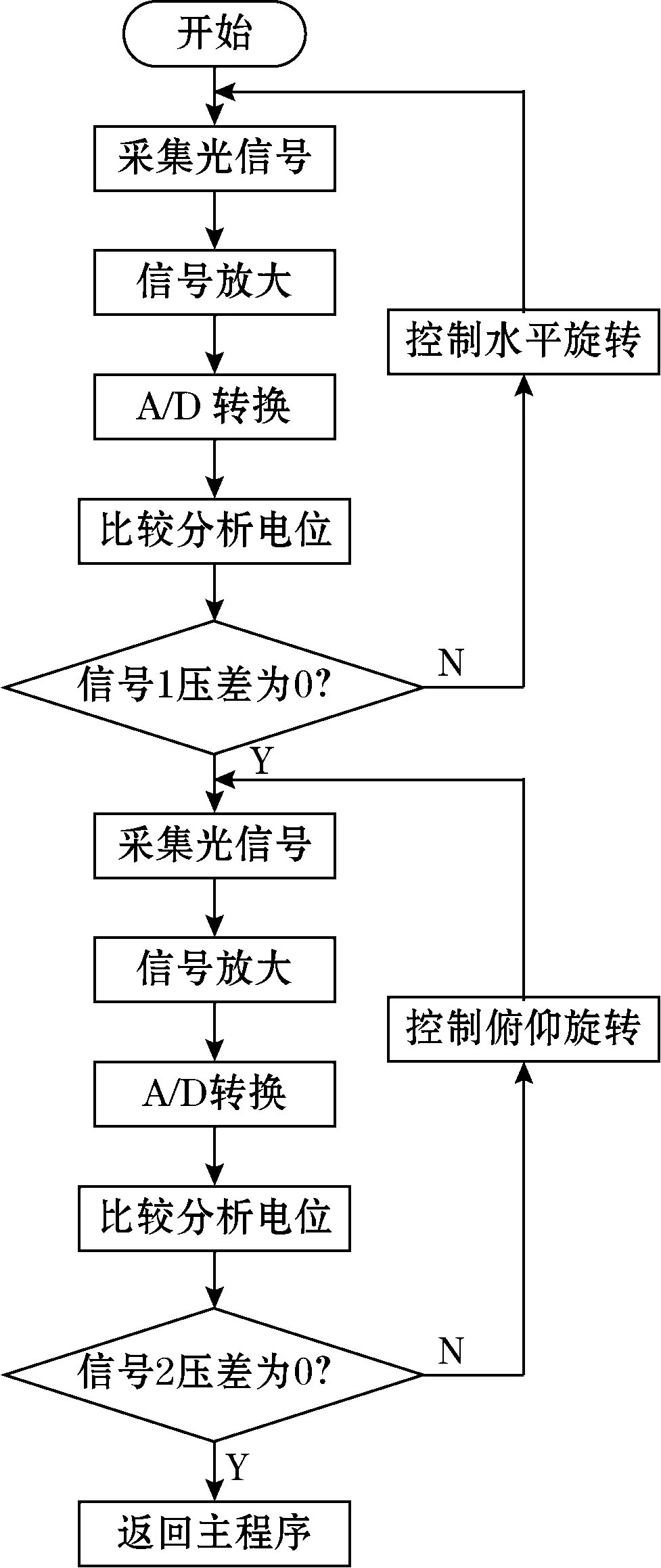
图6 控制流程图
3.3 自动追踪原理
采用液压驱动,调节太阳能光伏板的方位,分为水平面方位控制和竖直面方位控制。根据光线方向实现自动转移跟踪的思路是在太阳能板的上面放置4片小型光敏电阻,由于光敏电阻接收到的光能随太阳照射角度改变而改变,所以当太阳光照射角度随时间转动时,此光敏电阻采集及送出的电压大小会变化。电路采样此4片小型光敏电阻输出的电压,以确定太阳的移动方向。
4 结论
基于单片机控制的太阳能智能跟踪控制系统,采用MC9S12XS128单片机控制,程序和结构简单,价格低廉且功能强大。控制系统主要由光敏传感器、信号放大系统、核心控制系统、驱动模块、太阳能电池板、机械结构模块等组成。光敏传感器为4个光敏电阻嵌入的空心半边球,保证追踪精度,4个光敏电阻负责采集8位数据模数采集,并采用数字滤波方法,准确读出E、F两端电压,通过5110显示器显示系统采集的电压值,实现人机交互,以达到对系统运行人工监测的目的,再分析就能判断出太阳方位,然后通过单片机控制双轴驱动结构将太阳能板转动到垂直于太阳光入射的方向面。此外,还采用风力传感器使太阳能追踪器能在雷雨天气中得到保护,采用无线蓝牙通信技术利用PC机对系统关键数据进行实时通信,采用DS1302芯片进行实时时钟电路设计。该控制系统结构简单、价格低廉、功能全面,系统稳定,具有自我保护功能,既可以保证系统追光的精确性,又可以满足光伏设备在不同天气、不同海拔、不同纬度的使用要求,使设备最大可能地利用太阳光源,发挥最大的发电效率。
[1] 王晓苏.全球最大太阳能发电站运行喜忧参半.中国能源报,2012-01-09(9).
[2] SEME S,STUMBERGER G.A novel prediction algorithm for solar angles using solar radiation and differential evolution for dual-axis sun tracking purposes.Solar Energy,2011,85:2757-2770.
[3] 默少丽,王鹏月.太阳自动跟踪控制系统的设计.实验室研究与探索,2012,31(12):82-85.
[4] ALI H,LMUKHTAR A.Design of phase compensation for solar panel systems for tracking sun.Energy Procedia,2013,36:9-23.
[5] 张翠云,陈学永,陈仕国,等.基于PLC的双轴太阳能跟踪控制系统设计.福州大学学报,2013(6):1051-1055.
[6] 凌好,刘荣忠,郭锐,等.基于STM32的太阳自动跟踪控制系统的设计.计算机测量与控制,2012,20(2):383-385.
[7] 吕文华,贺晓雷,于贺军,等.全自动太阳跟踪器的研制与应用.光学精密工程,2008,16(12):254-255.
Design of Solar Energy Automatic Tracking System Based on Single-chip Microcomputer Control
LI Ren-hao1,GONG Si-min2,YANG Fan1,LIU Song1,LI Xiao-bing1
(1.School of Mechatronics Engineering,Nanchang University,Nanchang 330031,China; 2.School of Information Engineering,Nanchang University,Nanchang 330031,China)
High-precision solar energy automatic tracking system based on MC9S12XS128 single chip microcomputer was designed by optoelectronic tracking principle and sensor positioning and tracking method.The control system was made of LCD module,real-time clock module,photoelectric sensor module,wind sensor module,wireless communication module and hydraulic module,etc.The system can make panoramic stable and accurate tracking by the artificial intelligence and automation control.The solar energy automatic tracking system has the advantages of simple structure,low price,complete function,system stability and self protection function.Not only can guarantee the accuracy of the system equipment,the system can also meet the using requirements of different areas and environments.
solar energy; tracking system; single chip microcomputer control; intelligent
2014-03-25 收修改稿日期:2014-11-26
TK513.4
A
1002-1841(2015)04-0051-03
李小兵(1979—)副教授,博士,主要研究领域方向为机械创新设计。E-mail:lixiaobing@ncu.edu.cn
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
小学生学习指导(低年级)(2020年10期)2020-11-09
重型机械(2020年2期)2020-07-24
凿岩机械气动工具(2017年3期)2017-11-22
数学大王·中高年级(2017年2期)2017-02-08
山西青年(2017年8期)2017-01-31
凿岩机械气动工具(2016年2期)2016-11-11
学苑创造·A版(2016年4期)2016-04-16
中国人民公安大学学报(自然科学版)(2014年3期)2014-06-23