利用测温电路线性补偿MEMS加速度计零偏温漂
2015-06-07 03:06刘云峰董景新
仪表技术与传感器 2015年8期
徐 哲,刘云峰,董景新
(1.清华大学精密仪器系,北京 100084;2.总参陆航研究所,北京 101121)
利用测温电路线性补偿MEMS加速度计零偏温漂
徐 哲1,2,刘云峰1,董景新1
(1.清华大学精密仪器系,北京 100084;2.总参陆航研究所,北京 101121)
为提高MEMS加速度计温度稳定性,针对MEMS加速度计零偏温度漂移问题,提出了一种基于闭环点位置控制的零偏温漂抑制方法,该方法利用测温电路生成线性控制电压,在不同温度下将闭环点位置控制于零反馈位置附近,此时闭环加速度计的零偏近似为0,在全温范围内的零偏漂移量可显著降低。对闭环MEMS加速度计进行温度循环试验,试验结果表明,加入线性控制电压后闭环加速度计的零偏温漂下降到0.1 mg/℃以内,与不加线性控制电压相比提高了一个数量级以上。该方法实现简单,可操作性强,无需额外硬件开销,利于工程化实现。
加速度计;零偏温漂;闭环点位置;测温电路;线性补偿
0 引言
温度稳定性是电容式MEMS加速度计最重要的指标之一,由于环境温度变化导致的加速度计零偏温漂是影响其综合精度的关键问题[1-3]。当环境温度改变时,由于检测电路的漂移会使闭环加速度计的闭环点位置发生改变,从而造成检测输出的变化,即所谓的零偏温漂。
文献[4]中采用的由外部施加闭环点控制电压的方法虽然可以有效降低加速度计的温漂,但其控制电压是由加速度计系统外部生成,这就要求在导航系统中必须有能够生成该控制电压的电路,而一般导航系统中往往难以满足这种要求,而若在加速度计内部加入控制电路又会增大系统体积和功率,因此由外部施加闭环点控制电压的方法使用范围有限。
鉴于外部施加闭环点控制电压的局限性,需寻求一种更加实用的由加速度计内部生成控制电压的方法。测温电路根据温度的变化生成线性测温电压,可由该测温电压通过线性变换生成控制电压来对闭环点位置进行控制。利用测温电路生成控制电压不增加系统的复杂度,且不依赖于外部系统硬件,实现方式简单,易于工程化。
1 零偏温漂分析和闭环点位置控制原理
电容式MEMS闭环加速度计由敏感元件和电路2部分组成。其中,MEMS敏感元件可等效为典型的二阶系统,当外界加速度输入时,上下极板形成差动电容,差动电容量即正比于输入的加速度值,通过检测电路将差动电容转化为电压值,然后通过校正环节将负反馈电压施压于加速度计敏感元件,由于静电力的作用使敏感元件始终处于平衡位置从而实现闭环,此时的反馈电压即反映了输入加速度值的大小[5-7]。闭环加速度计的原理框图如图1所示。

图1 MEMS加速度计闭环原理框图
图1中:a为外界输入的加速度值;m为敏感质量;b为敏感元件阻尼系数;k为敏感元件刚度;x为闭环点位置;d0为极板间隙;Vs为高频载波电压;Kamp为检测前向放大倍数;K、T1、T2和T3均为PID校正参数;Kb为反馈系数;Cf0为反馈加力电容;Vref为预载电压;Vout为输出电压;Vb为反馈电压;ΔVT为由温度变化造成的偏置电压;Vc为闭环点控制电压。
当环境温度改变时,由于检测电路参数的改变和封装应力的变化会使电容检测输出产生漂移,这相当于在闭环回路内加入一个偏置电压ΔVT,由于加速度计工作于闭环状态,则必然会导致闭环点位置的改变以调整被测差动电容的分配关系来抵消掉该偏置电压,闭环点位置移动将造成支承梁形变变化,带来的应力的调整须通过反馈加力电压相应变化来抵偿,从而造成零偏温漂。此时,若在前向通道加入与偏置电压ΔVT大小相等方向相反的控制电压Vc,可保证闭环点位置始终处于零反馈位置,则由检测电路造成的零偏温漂即可极大改善[8]。
2 利用测温电路生成线性控制电压
2.1 控制电压规律的获取
将加速度计的环路打开且加入预载电压,在ΔVT位置下对加速度计开环工作状态进行温度循环试验,此时无外界加速度输入且梁的机械力和反馈的静电力平衡,则此时的开环输出Vdc即为保证动极板位于零反馈位置的检测输出电压。
由于测温电路只能生成线性的控制电压,因此只能够对加速度计开环温漂曲线利用1阶多项式进行拟合,可得到控制电压的规律如下。
Vc=-Vdc=ω(1)·VT+ω(0)
(1)
式中ω(1)和ω(0)为线性拟合系数。
2.2 测温电路
现有的加速度计采用基于Pt1000的恒压式测温电路,根据基准源接入放大器端口的不同又有正极恒压式和负极恒压式2种,其电路分别如图2和如图3所示。

图2 正极恒压式测温电路

图3 负极恒压式测温电路
正极恒压式测温电路的温度输出规律为
(2)
式中:R25~R28为用于控制增益的低温漂电阻;Vcc为正的基准源电压。
负极恒压式测温电路的温度输出规律为
(3)
可见,正极恒压式和负极恒压式测温电路随着温度改变电压输出的变化方向不同。当温度改变时,测温电阻Pt1000发生线性变化,2个测温电路的输出也随着线性改变,测量其输出电压即可获知环境温度值。
2.3 线性控制电压的生成
利用运算放大器搭建线性变换电路,通过测温电路的输出生成控制闭环点位置的线性电压,并将该线性控制电压施加于闭环加速度计环路内以实现对闭环点位置的控制,控制电压线性变换电路如图4所示。

图4 控制电压线性变换电路
控制电压线性变换电路的输出规律为
(4)
式中:Rc1和Rc2为用于调整放大倍数的低温漂电阻;R03和R04为用于调整零点的低温漂电阻。
由于控制电压的斜率可能为正也可能为负,因此在选择测温电路类型时要根据控制电压规律来选择正极恒压式或负极恒压式。由于控制电压施加在仪表放大器AD8221的参考端,根据AD8221手册可得实际输出V′dc为
V′dc=Vdc+Vc
(5)
则生成的控制电压需要与开环输出电压反向。根据上面推导的线性控制电压生成规律可知,若开环输出温漂斜率为负时,则控制电压的斜率需要为正,则测温电路的斜率应为负,此时需要采用负极恒压式测温电路;相反,若开环输出温漂斜率为正时,则控制电压的斜率需要为负,则测温电路的斜率应为正,此时需要采用正极恒压式测温电路。
由于正极恒压式和负极恒压式具有相似的电路结构,不同的只是R26和R28是连接Pt1000和基准源还是接地,因此在PCB板设计时无需设计两套电路板,只需要在R26和R28一端增加接地焊盘。当R26焊接在连接于Pt1000和基准源的焊盘上,R28焊接在接地焊盘时,测温电路为正极恒压式;当R26焊接在接地焊盘,R28焊接在连接于Pt1000和基准源的焊盘上时,测温电路为负极恒压式。这样的设计使得电路板的通用性强,实际操作中简单易行。可切换测温电路类型的PCB板设计如图5所示。
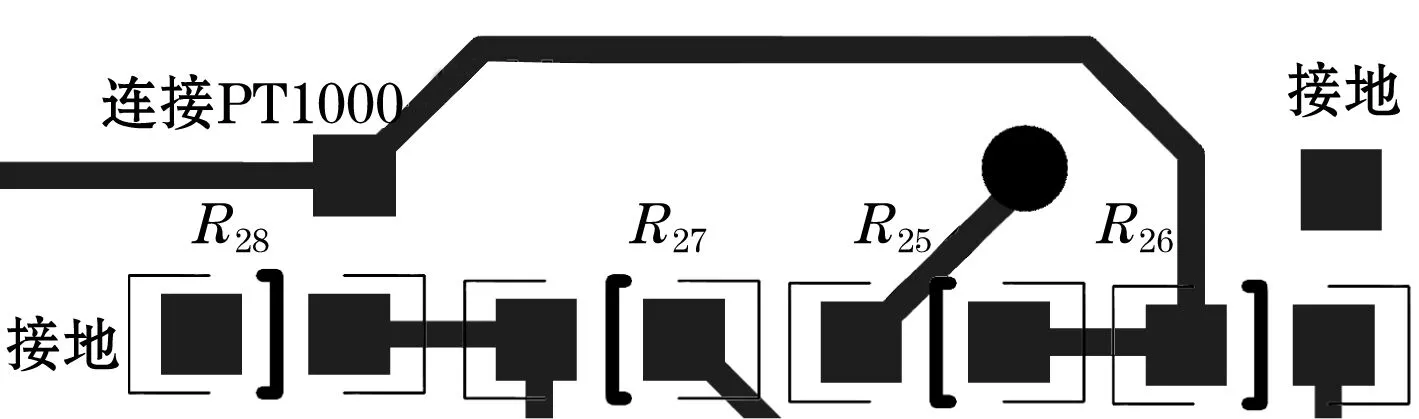
图5 可切换测温电路类型的PCB板
选择好测温电路类型后,即可根据控制电压规律选择R01~R04的阻值,并由测温电路生成线性的闭环点控制电压。
3 试验结果与分析
为验证本文提出的利用测温电路线性控制闭环点位置的有效性,对5201和3084号加速度计进行连续温度循环试验。
3.1 线性控制电压生成试验结果
对5201和3084号加速度计进行开环连续温度循环试验,其中5201号加速度计表头刚度较高,其开环标度因数为0.0976 V/g;而3084号加速度计为的开环标度因数为0.2554 V/g。两只加速度计的预载电压均为-2.5 V。测得开环加速度计输出温漂曲线后对该温漂曲线进行线性拟合,根据拟合出的曲线斜率和零点选取相应的R01~R04阻值,然后对实际产生的线性控制电压进行开环连续温度试验,验证控制电压输出与拟合曲线的差异。实际生成的控制电压应与开环温漂拟合曲线反向,为更清楚直观的进行对比在作图时将实际测得的控制电压取了反向,其试验结果如图6所示。


图6 MEMS加速度计开环零偏温漂试验结果
从试验结果中可以看出,5201号加速度计的开环温漂绝对值低于3084号加速度计,这是由于5201的刚度较高;5201号开环温漂线性拟合其温度系数为负,因此应采用负极恒压式测温电路,而3084号需采用正极恒压式测温电路;5201号加速度计的开环温漂曲线具有较大的滞环,进行线性拟合具有较大误差,而3084号加速度计的开环温漂曲线成近似线性,线性拟合度较好;2只加速度计生成的线性控制电压斜率均与拟合曲线相吻合,但由于实际选取的匹配电阻与理论值有偏差,因此造成了几mV的偏移。
3.2 闭环点控制试验结果
分别对加入温度线性控制电压和不加入线性控制电压的闭环加速度计进行连续温度试验,对两者的零偏温漂曲线进行对比,试验结果如图7所示,图中均以60 ℃的零偏值作为基准零点,且将零偏输出值转换为其加速度值。
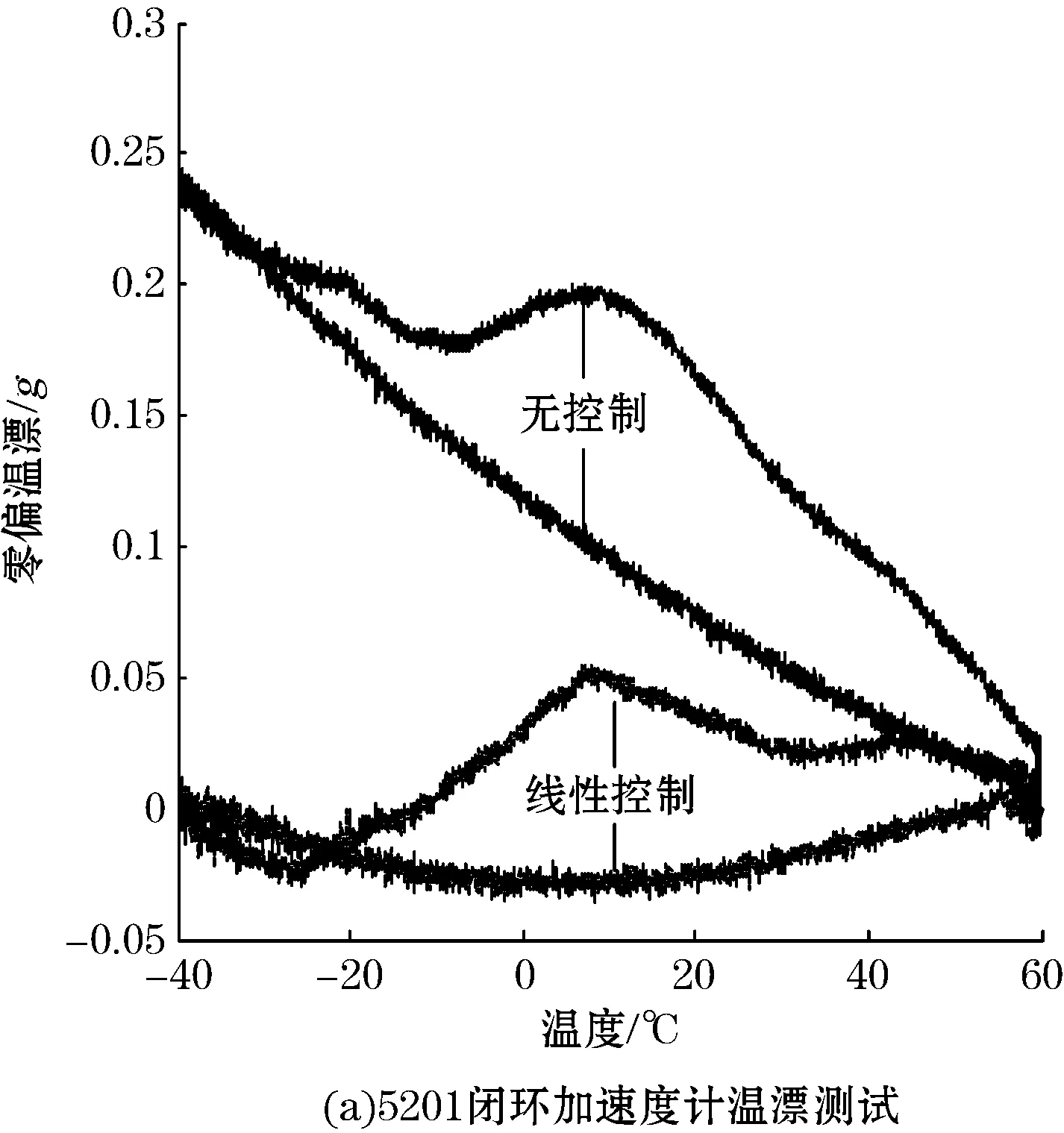
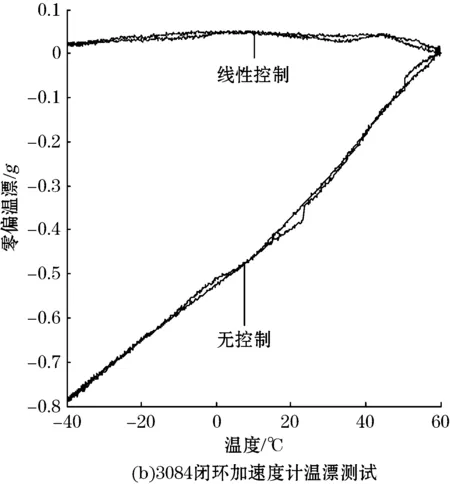
图7 闭环加速度计零偏连续温度循环试验结果
从试验结果中可以看出,加入线性控制电压后,在不同温度下闭环点位置被控制在零反馈位置附近,可极大地降低闭环加速度计零偏;5201号加速度计的零偏温度系数从2.5 mg/℃下降到0.1mg/℃以内,而3084号加速度计的零偏温度系数从8mg/℃下降到0.1mg/℃以内;加入线性控制电压无法降低温漂滞环,5201号加速度计本身具有较大的零偏温漂滞环,而加入线性控制电压后温漂滞环无改善。
4 结论
本文针对环境温度导致MEMS加速度计闭环点位置漂移问题,提出了利用测温电路生成线性控制电压的方法将闭环点位置控制在零反馈位置,保证加速度计在不同温度下零偏输出始终接近于零,以此降低闭环加速度计的零偏温漂。试验结果表明,加入线性控制电压后闭环加速度计零偏温漂可下降到0.1 mg/℃以内。
相比于在系统应用时采用软件补偿的方式,基于闭环点位置控制的线性补偿方法,可在全温范围内实现闭环点位置的稳定,且该方法无需外部软硬件支持,仅通过自身电路结构实现控制电压的生成,不增加额外器件开销,实现简单,可操作性强。
该方法也具有一定的局限性:由于利用测温电路只能生成线性的控制电压,因此当加速度计开环零偏曲线具有较大非线性时,利用线性控制电压所控制的闭环点位置距零反馈位置偏离较大,则此时对零偏温漂抑制效果不理想;且由于无法生成具有滞环效果的控制电压,因此利用测温电路生成控制电压的方法对于温漂滞环无抑制效果。
[1] 董景新.微惯性仪表——微机械加速度计.北京:清华大学出版社,2002:1-296.
[2] ZWAHLEN P,DONG Y,NGUYEN A M,et al.Breakthrough in high performance inertial navigation grade Sigma-Delta MEMS accelerometer.Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium.South Carolina:IEEE,2012:15-19.
[3] BARBOUR N M.Inertial navigation sensors.Low-cost navigation sensors and integration technology,2011:1-28.
[4] 徐哲,刘云峰,董景新.基于闭环点位置控制的硅微梳齿式加速度计温漂抑制方法.中国惯性技术学报,2014,22(1):16-21.
[5] FAN D,LIU Y F,HAN F T,et al.Identification and adjustment of the position and attitude for the electrostatic accelerometer’s proof mass.Sensors and Actuators A:Physical,2012,187:190-193.
[6] FAN D,LIU M J,LIU Y F,et al.Servo loop design of capacitive MEMS accelerometer under high preload voltage 23rd Chinese Control and Decision Conference (CCDC),Mianyang,2011.
[7] CAIXIN W,JINGXIN D,YUNFENG L,et al.Nonlinearity of a closed-loop micro-accelerometer IEEE International Conference on Control Applications.Singapore,2007.
[8] LAJEVARDI P,PETKOV V,MURMANN B.A ΔΣ interface for MEMS accelerometers using electrostatic spring-constant modulation for cancellation of bondwire capacitance drift.Solid-State Circuits Conference Digest of Technical Papers (ISSCC),2012 IEEE International,San Francisco,2012:196-198.
Linear Compensation to Thermal Bias Drift of MEMS AccelerometerBased on Temperature Measurement Circuit
XU Zhe1,2,LIU Yun-feng1,DONG Jing-xin1
(1.Department of Precision Instrument,Tsinghua University,Beijing 100084,China;2.Army Aviation institute,Beijing 101121,China)
Aiming at the thermal bias drift of MEMS accelerometer,a method to depress the drift based on closed-loop position control was proposed.A linear control voltage generated by temperature measurement circuit encloses the closed-loop position to the zero-feedback position,led to the bias output of the accelerometer close to zero,and the thermal bias drift can be reduced significantly.The temperature cycling test results indicate that the thermal bias drift is depressed to 0.1 mg/℃ under the linear control voltage,and an order of magnitude of enhancement is achieved.The advantages of simplicity,operability,economical efficiency make it suitable to engineering approach.
accelerometer;thermal bias drift;closed-loop position;temperature measurement circuit;linear compensation
总装“十二五”预研项目(513090203**)
2014-11-21 收修改稿日期:2015-03-03
U666.1
A
1002-1841(2015)08-0045-03
徐哲(1981—),博士研究生,主要从事MEMS惯性仪表研究。 E-mail:xu-z10@mails.tsinghua.edu.cn 刘云峰(1974—),副教授,主要从事MEMS惯性仪表研究。 E-mail:yfliu@mail.tsinghua.edu.cn 董景新(1948—),教授,主要从事MEMS惯性仪表研究。 E-mail:dongjx@mail.tsinghua.edu.cn
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
电气技术(2022年6期)2022-06-27
燃料化学学报(2022年5期)2022-05-30
山西电子技术(2021年1期)2021-02-05
中国惯性技术学报(2019年1期)2019-05-21
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
智能城市(2018年18期)2018-02-04
中国惯性技术学报(2017年1期)2017-06-09
探测与控制学报(2015年4期)2015-12-15