基于内存交互的导引头末制导雷达系统协同仿真
2015-05-30 02:52赵东涛黄雁飞
中国新通信 2015年12期
赵东涛 黄雁飞
【摘要】 针对复杂的导引头末制导雷达系统,采用了Cosim与SPW交互仿真的方法。该方法首先在SPW平台上建立导引头雷达在末制导阶段系统模型,仿真导引头在末段攻击目标的真实环境;然后建立Cosim平台,由Cosim承担主调任务,SPW只依照Cosim的命令推进自身仿真流程,并通过内存交互向Cosim反馈仿真数据;最后实时动态的显示出结果。
【关键词】 导引头雷达 协同仿真 SPW
一、基于SPW平台的系统级仿真平台
导引头雷达系统由天馈系统、信号处理系统、收发系统、伺服控制系统及结构系统组成,其中天馈系统用于辐射发射功率,接收回波脉冲;信号处理系统接收上位机指令及数据,控制伺服系统及天馈系统运动,并生成各种基准脉冲及波门控制信号;收发系统根据信号处理器产生的控制时序,生成发射信号并接收回波脉冲,产生可供信号处理器提取目标信息的模拟信号;伺服控制系统接收指令角进行天线预定,实现天线波束准确指向所定区域,并克服弹体扰动保证在惯性空间内的稳定;结构系统用于执行精确机械运动。
信号生成系统由初始化模块、飞控机模块、计算模块、目标模块、杂波模块和干扰模块六部分组成。其中初始化模块用于目标、弹体、信号处理器的初始化;飞控模块完成与导引头之间的通信并存储仿真期间的指令状态信息;计算模块计算目标与弹体的位置、姿态并产生三通道中频回波信号;目标模块包括目标在宽带信号照射下表现出的起伏特性、多散射点特性及角闪烁特性;杂波模块包括导引头飞行过程中遇到的地杂波和海杂波;干扰模块包括无源干扰箔条干扰、有源压制干扰噪声调频干扰。
二、基于COSIM平台的导引头仿真系统
COSIM平台负责仿真系统的运行及模块间的数据传输,其功能模块划分为SPW模块、伺服模块、信号处理模块以及可视化模块。其中SPW模块完成信号生成、天馈及接收系统建模;伺服模块采用SIMULINK模型来控制天线的转动;信号处理采用导引头C语言软件,建立信号处理器的SPW模型;可视化系统采用COSIM-VE可视化软件来实时显示每步解算的结果。
三、仿真流程
仿真过程由Cosim承担主调任务,SPW只依照Cosim的命令推进自身仿真流程,且及时向Cosim反馈每步仿真数据。系统总体仿真流程如图1所示,标有序号的步骤属于需要Cosim和SPW间交互数据的步骤。其中除第5步之外,均属于SPW等待Cosim给出数据和命令。第5步的情形正好相反。
四、仿真实验结果
窗口一:主窗口,弹体飞行姿态、过程显示,航目编队运动显示,环境背景显示;小窗口,显示天线运动状况。窗口二:每10个PRT积累后的和通道、方位差、俯仰差三通道回波一维显示。如图2所示。窗口三:导引头信息量显示窗口,实时显示角偏差、角速率、弹目距、弹目速、信噪比、信杂比等信息。
如图2所示。 由上述图可以看出,可视化窗口显示出导引头雷达三通道回波数据、角速率、角偏差、弹目距、弹目速等信息,实现了基于Cosim平台的协同仿真系统,实现了完整的导引头仿真模型。
五、结束语
本文在SPW平台上建立了导引头雷达目标、环境仿真模型,并将其应用到Cosim平台,完成与Cosim平台的接口规范,通过内存中转方法实现命令数据传输,仿真实验表明该方法稳定可靠,可以大大提高复杂的导引头仿真效率,具有很强的工程使用价值。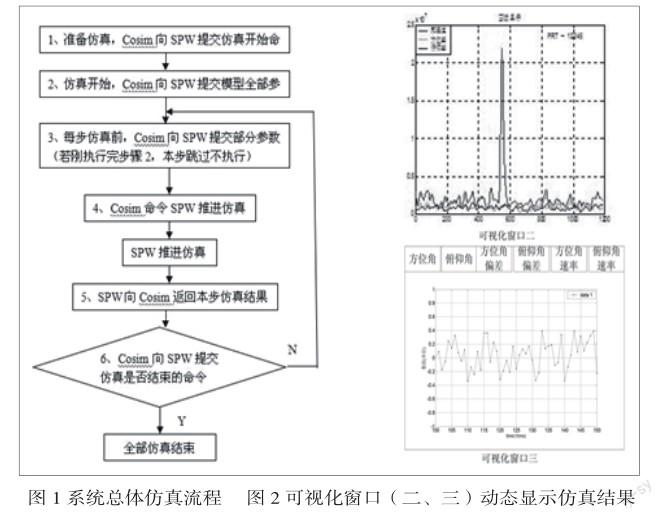
参 考 文 献
[1] 徐卫 张林让 唐自新 基于SPW的雷达信号处理系统仿真[J] 计算机工程应用 2003
[2] 朱持恒 李立萍 雷达中频正交采样在SPW环境中的实现[J] 实验科学与技术 2003