
基于单片机的仓储货运车防撞控制与警报系统的设计
2015-05-30 10:48:04倪宏杰李虎刘丽君
科技创新与应用 2015年16期
倪宏杰 李虎 刘丽君
摘 要:运货车在生产线和仓储系统中广泛应用,在货物运输中,车辆前进和倒退中常发生碰撞,造成事故和危险。针对此问题,设计了单片机控制的测距与报警系统,在车辆与前后车辆(物体)间距小于规定距离时,及时发出控制和报警信号,实现车辆减速、制动和报警。
关键词:单片机;运货车;防撞控制;警报系统
引言
随着社会时代的快速发展和人们生活水平的不断提高和完善,仓库运货车越来越必不可少的工具,车库行车安全问题变得日趋严重。文章结合了单片机和超声波系统测距系统,主要由单片机控制电路,超声波发射模块和接受模块三部分组成。系统主要功能是当运货车运行过程中进行自动测距并对距离做判断,在运货车距离障碍物小于安全值时,自动报警,进行减速操作。若因外因导致距离足够小,危险系数过大,则系统自动制动以避免事故的发生。
1 系统总体方案
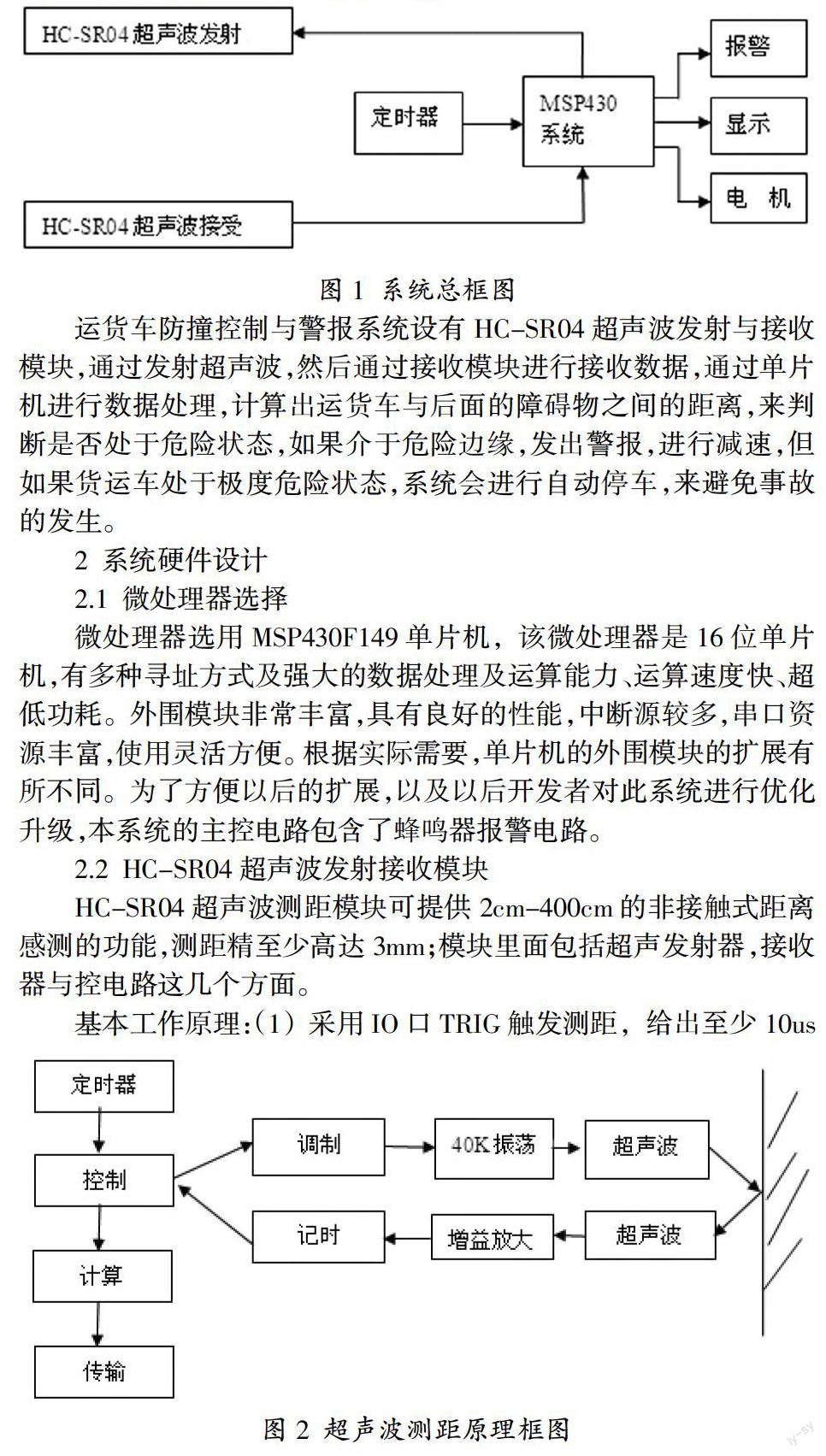
系统由上位机和显示系统组成,上位机包括MSP430F149最小系统,HC-SR04全套超声波测距,报警系统。显示系统由LCD1602进行实时扫描显示。系统总框图如图1所示。
图1 系统总框图
运货车防撞控制与警报系统设有HC-SR04超声波发射与接收模块,通过发射超声波,然后通过接收模块进行接收数据,通过单片机进行数据处理,计算出运货车与后面的障碍物之间的距离,来判断是否处于危险状态,如果介于危险边缘,发出警报,进行减速,但如果货运车处于极度危险状态,系统会进行自动停车,来避免事故的发生。
2 系统硬件设计
2.1 微处理器选择
微处理器选用MSP430F149单片机,该微处理器是16位单片机,有多种寻址方式及强大的数据处理及运算能力、运算速度快、超低功耗。外围模块非常丰富,具有良好的性能,中断源较多,串口资源丰富,使用灵活方便。根据实际需要,单片机的外围模块的扩展有所不同。为了方便以后的扩展,以及以后开发者对此系统进行优化升级,本系统的主控电路包含了蜂鸣器报警电路。
2.2 HC-SR04超声波发射接收模块
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测的功能,测距精至少高达3mm;模块里面包括超声发射器,接收器与控电路这几个方面。
基本工作原理:(1)采用IO口TRIG触发测距,给出至少10us的高电平信号;(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340m/s))/2。图2是相应的系统框图。
3 系统软件设计
超声波发送部分在小车运行后不断发送超声波,当接收部分接收到反射回来的信号时,通过单片机对接收与发送数据的时间进行数据处理,计算与障碍物之间的距离,并判断检测到的障碍是否在危险内,如果距离异常,发出报警信号,并做减速操作,同时判断情况是否属于紧急状态,当处于紧急状态时,小车自动做出制動动作。
4 系统测试与分析
4.1 测试方案设计
模拟测试:通过将此系统安装在一般玩具小车上,来模拟小车在不同环境下进行行车演示,记录,分析测得数据,并进行探讨此设计的系统是否可靠,安全。
模拟测试结果:由模拟测试可知,当小车在前进或后退过程中,当检测到的距离不在安全标准范围内时,声光模块可成功报警,为减速起到提醒作用。当把小车置于危险系数较大距离时,小车制动,停止运动。模拟的效果总体上反应小车可以在一定场合实现防撞与报警的功能,达到了预期的要求。
4.2 具体设计方案
(1)利用测距传感器,对货物车辆前进与后退过程中遇到的障碍物进行距离测定;(2)用单片机对测距传感器等前端检测信号进行处理与运算;(3)按照安全运行的要求,通过单片机对所测距离进行判断,若处于警报距离提供报警、减速,当距离过小时采取自动制动控制信号,实现安全控制。
5 结束语
通过在模拟测试,结果显示,本系统基于MSP430F149的储货运车防撞控制与警报系统,能够有及时发出控制和报警信号,实现车辆报警、减速、制动和。从而避免在工厂中事故的发生,说明了此系统设计合理,达到了我们预期的效果。
参考文献
[1]赵海鸣,卜英勇,王纪婵,等.一种高精度超声波测距方法的研究[J].湖南科技大学学报(自然科学版),2006(3):35-38.
[2]戴巍.现代汽车防撞系统[J].汽车维修,2006(3):40-41.
[3]黄继昌.传感器工作原理及应用实例[M].北京:人民邮电出版社,1998.
[4]罗庆生,韩宝玲.一种基于超声波与红外线探测技术的测距定位系统[J].计算机测与控制,2005(4):304-306.
[5]李明峰,冯宝红,刘三枝.GPS定位技术及其应用[M].北京:国防工业出版社,2006.
作者简介:倪宏杰(1992-),男,江苏南通市人,工作单位:江苏师范大学,职务:学生,研究方向:自动化。
猜你喜欢
课堂内外(小学版)(2021年12期)2021-01-17 07:31:18
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
发明与创新·小学生(2019年1期)2019-01-23 11:27:48
电子制作(2018年12期)2018-08-01 00:48:04
科技风(2018年33期)2018-05-14 09:50:08
电子制作(2017年19期)2017-02-02 07:08:27
环球人物(2015年9期)2015-07-14 09:02:40
电子设计工程(2015年15期)2015-02-27 12:07:30
