
Buck变换器建模与非线性控制方法研究
2015-05-30 05:11刘大伟刘以建
科技创新与应用 2015年34期
刘大伟 刘以建


摘 要:分析DC-DC开关变换器建模的实际方式是研究开关电源的保障,对于分析和设计开关电源具有很大作用。传统模型与实际电路之间存在一定偏差是设计开关变换器中重要的问题。以此,文章分析了DC-DC开关变化器的建模,可以在一定程度上促进优化开关电源的性能以及提高设计效率。
关键词:直流-直流变换器;建模分析;PID控制;非线性控制
1 DC-DC概述
在电路基础波形工作的前提下,充分研究DC-DC变换器,电子设备中,一次电源就是整流器,二次电源就是DC-DC变换器。二次电源可以用来把振幅、频率等不可调方式下的直流振幅转变为可调的振幅、频率直流电压,上述过程可以很好地增加输出电能功率因数,所以,也可以叫做功率因数变换器。依据输入输出是否存在隔离,可以把DC-DC变换器分为两种,隔离式和不隔离式;不隔离直流变换器依据具有的开关个数可以分为三类,双管、单管、四管,其中单管可以分为六种,包括Buck变换器、Buck-Boost变换器、Boost变换器、Cuk变换器、Zeta变换器、Sepic变换器,文章主要研究Buck变换器建模与非线性控制方法[1]。
2 Buck变换器建模的方法
DC-DC变换器建模方式具有很多种方式,其中比较常用的就是小信号建模法、状态空间平均法、电路平均法、大信号建模法。状态空间平均法就是从DC-DC开关变换器工作过程中的所有子拓展结构的实际状态护法,利用时间来加权平均处理,以此可以得到统一的原电路状态方程,利用线性化和小信号扰动来处理,得到等效电路模型。相比较原来方式,这种方式不是十分容易理解,并且具体有不同的断续和连续导通模式。电路平均法实际上就是依据电路结构为基础,通过时间平均加权技术来合理分析电路,在不断增加电路元件以后,需要能够得到一定拓扑结构,进行大量计算[2]。
3 基于线性控制方法设计Buck变换器控制器
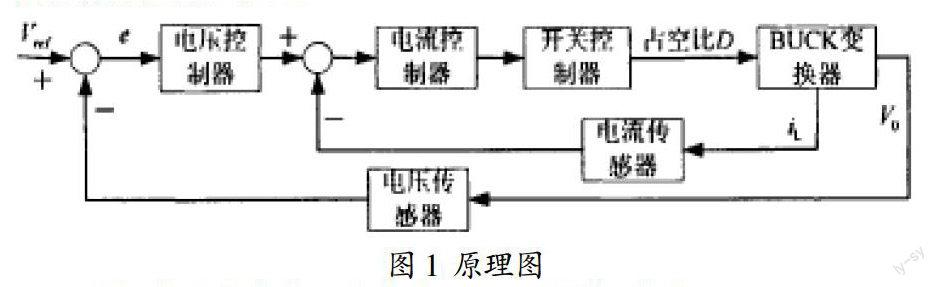
现阶段,已经被大量运用的单闭环控制方式属于线性控制,主要就是利用点反馈形成闭环控制方案,这种方法是设计DC-DC变换器中最早使用的一种控制形式,主要就是通过参考电压和输出电压差值来设计相应的线性控制器,然后通过PWM控制器来达到控制开关通断的目的,最后能够保证输出电压系统具有符合参考的电压。这种非线性控制是把电压作为基本反馈量,不能及时响应输入扰动,所以,具有比较慢的电路动态反应速度,需要具有比较大的超调,会在一定程度上由于环路增益来限制带宽,出现比较长的动态时间,此外,还需要适当引入电压波动到电源侧,因而使得具有比较低的控制精度,这种方式比较简单,很容易控制。
4 基于非线性控制方法设计Buck变换器控制器
滑膜控制是一种变结构控制,通过转换不同结构来达到实现控制系统的目的,主要就是具有不连续控制的控制特点,主要设计理论思路就是通过切换开关系统结构,保证可以使系统切线从所有出发点都可以输送到预先设计的滑动面中,沿着滑动面继续运动直到运行到稳定位置,在实际建立的过程中,需要保证传动系统具有一定时滞性和切换惯性,促使不能确定的运行到滑动基础面上,所以,容易导致出现剧烈运动。以此开始大力研究基于更加复杂方式的控制设计,以便于可以解决目前滑块不利于抖动的问题,具有响应速度快特点、并具有比较强的抗干扰能力[3]。(图2)
经过多年的研究和分析,逐渐发展出基于非线性控制规律技术,也就是抗干扰控制技术,具有传统PID技术的优点,可以从根本上提高传统PID技术的不足,而形成的新设计控制器思路。为了可以有效的提高控制器整体性能,从三方面分析抗干扰控制器:第一,利用跟踪微分器来实时跟踪控制系统装套和各阶段微分,避免发生传统PID方式中的超调和响应问题;第二,利用扩张状态观测器来有效检测综合扰动以及系统状态;第三,利用非线性状态误差反馈系统来达到大误差小增益、小误差大增益的控制形式。
5 非线性控制硬件仿真的实现实例
依据上述建模方式上建立Buck电路控制模型,依据Simulink建立仿真模型。
其中四个子模块包括扩张状态观测器、跟踪微分器、BUCK变换器以及非线性状态误差反馈,依据3=-c0?孜2-c1(x1-?琢0)2-c2(x2-?琢1)2公式计算,设定电路仿真参数是:C=10uF,L=270mH,额定输入电压Vi是8V;额定负载R=5Ω,参考输出电压是4V。在仿真过程中,首先需要合理的调整跟踪微分器参数,并且找到适合的过度方式,调整完成以后,不会受到影响;在合理调整扩张情况下的参数,确保可以迅速找到跟踪信号,为提取微分和状态信号提供保证,此外,还具有一定系统扰动量;有效调节非线性反馈参数,确保具有比较理想的系统性能。最后确定仿真系统与实际数值,如果进入稳定区域,具备比较强的适应性。可以发现,自抗扰控制方式对于抑制负载电流干扰和电源输入电压具有很强能力,能够很快响应,虽然会突然变化负载和电压,输出电压出现波动,但是十分微弱,可以在短时间内进行恢复,以便于可以证明自抗扰控制器具有一定适应性[4]。
6 结束语
总而言之,现阶段,大部分控制技术都是利用线性组合状态变量的方式来形成滑膜切面,上述方式相对简单,在实施时候,还是会存在缺陷,例如,不可以测量反馈变量等问题,但是自抗扰控制,在实施的时候,自抗扰控制器很难达到选择多项参数的目的,因此,需要在实际应用中合理使用上述两种控制形式,此外,还可以适当结合其他控制方式,保证具有比较高的效率。
参考文献
[1]杨国超.Buck变换器建模与非线性控制方法研究[D].江南大学,2010.
[2]尹慧.BUCK变换器非线性控制方法研究[D].黑龙江科技学院,2010.
[3]刘冬春.功率变换器的区域系统建模及控制方法研究[D].重庆大学,2011.
[4]陆治国.无复位开关的单周控制新方法研究[J].深圳信息职业技术学院学报,2010,3(1).
作者简介:刘大伟(1989-),男,汉族,江苏,硕士研究生,上海海事大学,电力电子技术及装置。
刘以建(1969-),副教授,上海海事大学物流工程学院电气系副主任,主要从事船舶电气自动化、船舶控制工程与系统仿真技术、电力电子技术、电源变换技术等方面的研究。
猜你喜欢
测控技术(2021年10期)2021-12-21
通信电源技术(2018年3期)2018-06-26
山东工业技术(2016年23期)2016-12-23
教育界·下旬(2016年8期)2016-12-14
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
电源技术(2016年2期)2016-02-27
电源技术(2015年11期)2015-08-22
