长距离明渠调水工程蓄量动态调节控制算法研究
2015-05-25 04:18陈文学穆祥鹏
中国水利水电科学研究院学报 2015年6期
崔 巍,陈文学,穆祥鹏
(中国水利水电科学研究院 流域水循环模拟与调控国家重点实验室,北京 100038)
长距离明渠调水工程蓄量动态调节控制算法研究
崔 巍,陈文学,穆祥鹏
(中国水利水电科学研究院 流域水循环模拟与调控国家重点实验室,北京 100038)
本文阐明了明渠渠池蓄量与节制闸闸前水位之间的单值对应关系,在此基础上提出一套通过动态调节渠池蓄量,实现闸前常水位运行的控制算法。该算法基于流量平衡和蓄量平衡关系推导,前馈控制与反馈控制相结合。前馈控制根据分水口计划主动调节各渠池蓄量,起粗调作用;反馈控制针对前馈控制过程出现的水位偏差,通过动态调节各渠池蓄量实时校正,起细调作用。该算法具有原理简单,参数率定简便,控制规则灵活,实用性强等特点。算法在南水北调东线工程胶东段渠道进行了仿真测试,模拟环境包含水位死区和闸门运动死区。结果表明,所提算法能够有效克服长距离明渠水力滞后的影响,及时有效消除各渠池闸前水位偏差,将水位波动限定在安全范围内。
水力学;南水北调;控制算法;闸前常水位运行;闸门死区
1 研究背景
以南水北调中线、东线工程为代表的长距离调水工程,具有输水流量大、距离长、控制节点多、运行工况复杂和输水要求高等特点。如中线一期总干渠长1 267 km,渠首设计流量350 m3/s,参与调度的节制闸超过60个;东线一期胶东输水干线渠道长240 km,渠首设计流量50 m3/s,参与调度的节制闸超过30个。这些长距离明渠调水工程在运行过程中,面临诸多控制问题,如闸门群控制耦合问题、水力滞后问题和强扰动问题等[1]。引入渠道自动化控制技术,对于克服上述因素影响,提高输水效率和效益,保障输水安全,具有重要意义。
渠道控制算法是渠道自动控制系统的核心,它描述了从输入水流信息(一般是水位、流量),到输出控制作用(一般是闸门动作)的整个逻辑过程[2]。自20世纪30年代起,国外学者将经典控制论、现代控制论和智能控制论等应用于渠道控制算法开发,各类算法不断涌现。如早期的两点式算法、科文算法;20世纪末出现的二次最优控制算法和预测控制算法;近年提出的模糊控制算法和鲁棒控制算法等。不过目前仅有少数算法得到应用,主要分布在北美和欧洲,其中主要是PID算法[3]。国内在该领域的进展相对滞后,20世纪中后期以研究水力自动闸门和单闸门控制算法为主,近些年随着引黄济青、南水北调中线工程等大型调水工程的兴建,加大了闸门群控制算法研究力度[1,4-5],但实践应用还很少。
闸门控制算法尚未得到有效推广,除了经济方面的原因,还与众多技术因素相关。目前多数控制算法基于传递函数、状态空间方程等线性模型开发,在运行工况变化时性能下降,需要繁琐的参数整定。以PID算法为例,Xianshu Piao[6]曾耗费约1周时间进行参数整定,Litrico[7]、Schuurmans[8]等多年致力于开发简便、实用的渠道PID控制算法参数整定技术。也有研究者采用多模型、多参数切换技术[9]解决上述问题,但技术门槛高,工作量较大。此外,PID等算法在处理闸门死区等非线性约束时,控制效果下降明显,出现水面持续振荡问题[10]。另外,PID等算法逻辑规则固定,水力过渡过程不易调整,运行上缺少灵活性。
本文提出一种实用性强的闸前常水位运行控制算法。首先阐明渠池蓄量与闸前水位间的单值对应关系,论证通过调节渠池蓄量实现闸前常水位运行的可行性。在此基础上,基于流量平衡和蓄量平衡关系,提出一套综合了前馈控制与反馈控制方法,通过动态调节渠道蓄量实现闸前常水位运行的控制算法。该算法原理简单,便于技术人员理解掌握;不要复杂费时的参数率定,且各流量工况下均适用;可方便地处理闸门运动死区、水位死区等约束条件,调度规则可视需要灵活修改。该算法以南水北调东线工程胶东段渠道为例,进行了仿真测试,控制效果良好。
2 调节渠池蓄量实现闸前常水位运行的原理
闸前常水位是包括南水北调中线、东线工程在内的许多调水工程采用的运行方式。该运行方式的特点是始终维持各节制闸的闸前水深相对稳定,流量变化时水面线绕闸前支枢点旋转,如图1所示。其主要优势是渠道输水能力强,分水口处水位高,且较为稳定;主要不足是渠池蓄量变化与其自然趋势相反,导致渠池的响应与恢复特性较其它运行方式差,水力过渡时间较长[2]。为保证安全高效输水,渠道运行时,一是需控制水位波动速率在安全范围内,通常是0.15 m/h及0.30 m/d,以防止水位变化过快引发衬砌结构破坏。二是需充分考虑水流状态非线性变化及水力滞后影响,“适时”、“适量”地满足沿线分水口的用水计划。

图1 闸前常水位运行方式
通过调节蓄量实现闸前常水位运行,其理论基础是渠池蓄量与闸前水位间存在联动关系,且这种关系是单值对应关系。可通过分析棱柱形明渠恒定渐变流微分方程得出,如式(1)所示。

式中:h为水深;s为流程;i为底坡;Q为流量;K为流量模数;Fr为弗氏数。
式(1)描述了水深沿程变化规律,常用于分析水面曲线的形状。输水明渠通常为正坡(i>0),水流呈缓流流态(Fr<1),闸前水深大于临界水深,因此水面线为M1型壅水曲线[11]。给定Q后,可设定闸前水深为控制水深,根据式(1),自下游向上游推算渠池水面线。将水面线沿流程s积分,可得到渠道蓄量V。显然,闸前水深、渠池水面线、蓄量V三者单值对应,调控蓄量V便可调控渠道水面线(含闸前的水位),即通过调节蓄量V可实现闸前常水位运行。
蓄量V与闸前水深的单值对应关系,可采用恒定非均匀流程序计算得到,工程应用中可按不同流量制作函数关系曲线或表格,方便管理人员查用。蓄量动态调节方法控制的是整条水面线,与传统的控制闸前单点水位的方式比较,局部水位波动的影响被坦化,因而控制性能更稳健,当然其代价是增加了数据采集量和计算量。
3 蓄量动态调节控制算法
3.1 算法结构根据控制逻辑的不同,渠道控制可分为前馈控制(开环控制)和反馈控制(闭环控制)两种。前馈控制不比对实际的水位偏差,只按预先制定的规则执行,因而没有抗干扰能力,其控制效果很大程度上依赖于管理人员的经验。反馈控制根据实测的水位偏差操作闸门,直至将水位偏差限定在指定范围内。反馈控制效果受水力滞后影响显著,单纯的反馈控制仅能克服小扰动的影响。

图2 蓄量动态调节算法流程示意图
长距离明渠调水工程水力滞后严重,分水口扰动作用强,单纯的前馈控制或反馈控制均无法胜任。蓄量动态调节控制算法将两种方法结合,前馈控制发挥“粗调”作用,反馈控制发挥“细调”作用。其实施流程如图2所示,即根据分水口用水计划,以及渠池的流量平衡与蓄量平衡关系(具体见3.2节),初步拟定各渠池不同时刻的蓄量调节过程,形成前馈控制规则,为便于实施,将该蓄量调节过程转换为节制闸流量过程(具体见3.3节)。前馈控制实施的同时,实时监测各渠池的闸前水位偏差,并基于蓄量V与闸前水深的对应关系,将其转换为各渠池的蓄量偏差。拟定反馈控制规则,修正各渠池的蓄量偏差。为便于实施,修正蓄量的过程被转换为修正节制闸流量的过程(具体见3.4节)。修正后的节制闸流量转换为节制闸开度,交予启闭机构执行。
3.2 渠池的流量平衡与蓄量平衡关系稳定状态下,渠池存在流量平衡关系,即

式中:Qin为渠池入流,即上游端节制闸的过闸流量;Qout为渠池出流,即下游端节制闸的过闸流量;q为分水口流量。
当分水口流量变化Δq时,渠池入流相应调整ΔQ,渠池出流不变,渠池蓄量随之变化ΔV(如图1中阴影部分)。根据第2节分析结果,ΔV与闸前水位呈单值对应关系,换言之,当渠池入流调整对应的渠池蓄量调整为ΔV时,闸前水位不变,水面线绕支枢点旋转,渠池蓄量呈动态平衡状态。
设蓄量平衡过程历时为Δτ,可由式(3)计算:

3.3 前馈控制规则输水明渠的流速通常仅为1 m/s左右,水力滞后严重,为了“适时”、“适量”向下游分水口供水,上游节制闸必须提前调整流量,并在Δτ时间内完成蓄量变化ΔV。基于上述主动蓄量补偿的思想,设计出单个渠池的前馈控制规则,如式(4)[12]:

式中:Qff为渠池入流流量;tq为分水口流量改变时刻。
对于N个渠池串联的情况,可依此类推,前馈控制规则如式(5)[13]。

式中:i为渠池号;t为时刻;Qend为渠尾流量。
3.4 反馈控制规则受闸门控制精度、计量误差等因素影响,闸前水位会出现偏差,此时需反馈调整渠池蓄量以修正闸前水位。该过程可描述为修正流量随时间的过程曲线,理论上,该过程曲线可是任意形状,但考虑可操作性,其形状应尽量简单。本文采用方波形状的流量曲线,设定蓄量校正时间为ΔT(i),则修正流量ΔQfb(i ,t)为:

式中:ΔVt(i,t)为基于闸前水位偏差计算出的渠池蓄量偏差,可基于恒定流计算程序或预先编制的闸前水位-渠池蓄量关系表算出。
3.5 算法的计算过程蓄量动态调节算法按式(7)—式(11)顺序计算,最终得到闸门群的开度过程。
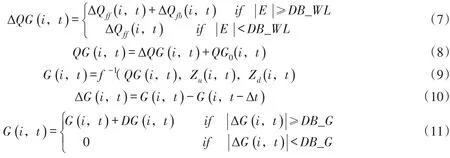
式(7)—式(11)中:ΔQG(i ,t)为渠池i上游端闸门流量增量;E为渠池i下游端闸前水位偏差,为了不致控制系统过于敏感,设定了水位死区DB_WL,只有当水位偏离该范围时,反馈控制算法才被激活;QG0(i ,t)为渠池i上游端闸门流量;G(i ,t)为渠池i上游端闸门开度;Zu、Zd分别为闸前、闸后水位;Δt为控制时间步长;DB_G为闸门运动死区,即闸门机械运动的最小行程,只有算法的输出大于该值时才被执行。
4 南水北调东线工程渠段仿真算例
4.1 数学模型仿真采用的水流控制方程为圣维南方程组:连续方程:

动量方程:

式中:y为水深;Q为流量;B为水面宽度;A为过水断面面积;S0为水力坡降;为水力半径;n为糙率;x为计算断面至起点的距离;t为时间。
圣维南方程组属于一阶拟线性双曲型偏微分方程,一般无法直接求得其解析解。本文采用收敛快、效率高且稳定性好的Preissmann隐式差分格式对其进行离散,建立求解域网格上的方程组,再与渠道上、下游边界条件联立,得到一个封闭的大型稀疏非线性方程组,采用双消去法求解。渠道中的闸门、分水口、倒虹吸、渐变段等边界均看作连接元件,考虑其局部水头损失及流量变化,按内部边界处理。
4.2 工程概况南水北调东线胶东段一期工程输水线路全长240 km,由济平段(东平湖-济南段)、济南市区段和济东段组成,见图3。采用渠道自流方式输水,渠首设计流量50 m3/s,设计水深3m左右,沿线布置19个倒虹吸和16个分水口门,共31个节制闸。工程无在线调蓄水库,水位波动需限制在0.15 m/h和0.3 m/d之内,实时控制要求高。
4.3 仿真工况渠道分水口用水计划如图4所示。上游有5个分水口自14 h流量线性减少至0,下游有7个分水口自14 h流量由0线性增加。上游边界条件为东平湖水库水位,设为定值,下游边界条件为引黄济青上节制闸出流流量,设为定值20 m3/s。

图3 南水北调东线胶东段渠道示意图
仿真时间240 h,节制闸控制时间步长20 min,闸门运动死区0.005 m,水位死区0.15 m。
4.4 仿真结果及分析限于篇幅,仅绘出渠池1、12、14、26和30的上游端闸门开度、过闸流量及下游端节制闸闸前水位偏差过程,如图5—图7。

图5 渠池上游端闸门开度过程
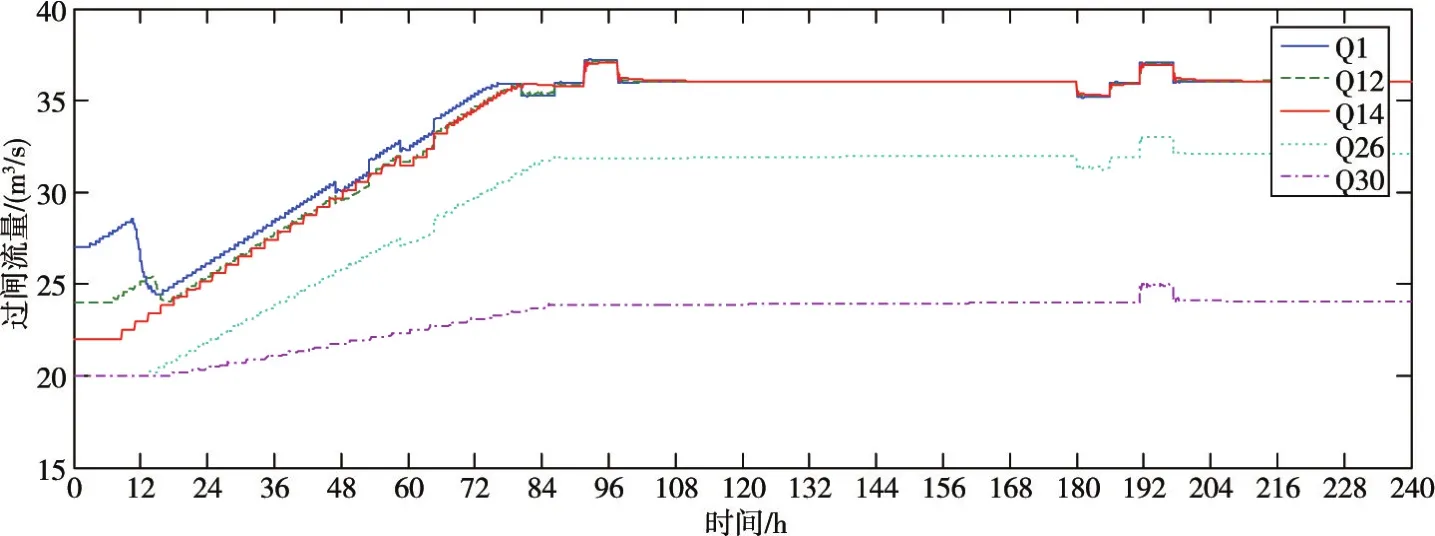
图6 渠池上游端节制闸过闸流量过程
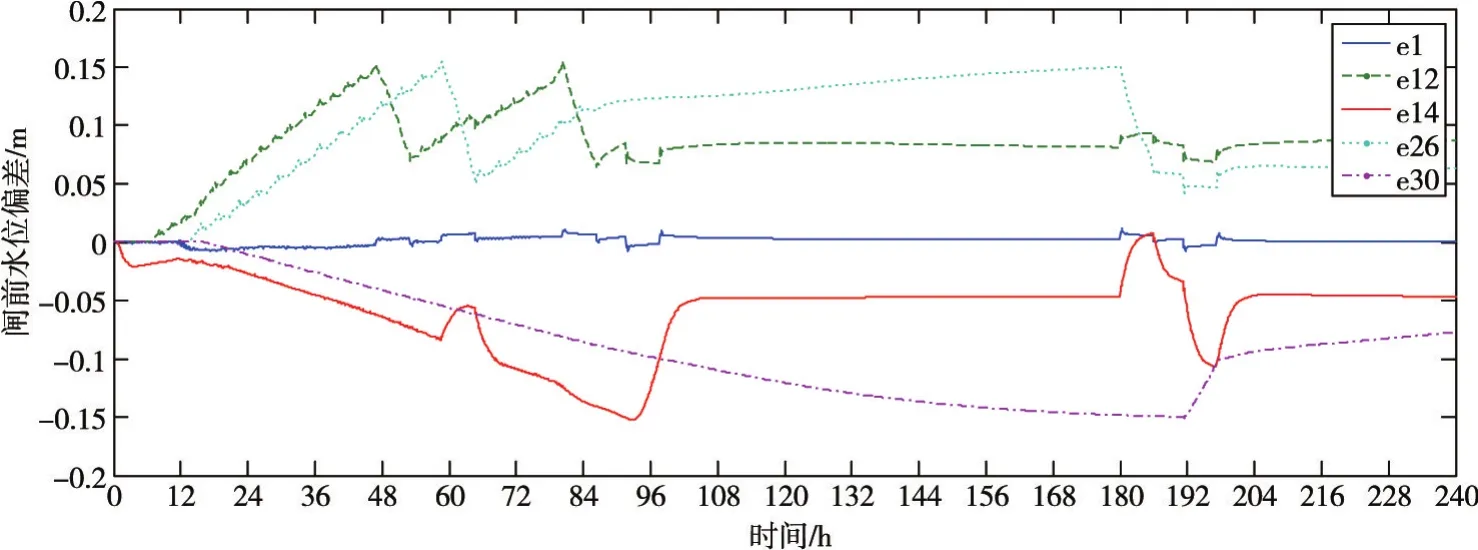
图7 渠池下游端节制闸闸前水位偏差过程
分析可知:
(1)在14 h分水口开启时,其上游渠池各节制闸已提前调整过闸流量(如图5所示),体现出前馈控制规则应对“水力滞后”的主动蓄量补偿作用。
(2)在14~87 h分水口开启过程中,其上游各渠池的闸前水位误差很快累积,其中第12、14、26渠池的闸前水位偏差超过了限定值0.15 m,此时蓄量动态调节算法及时介入(如图7所示),即刻扭转了水位偏差增大的趋势,体现出反馈控制规则有效应对“扰动问题”的作用。
(3)在整个过渡过程中,各渠池的闸前水位偏差均控制在±0.15 m以内(如图7所示),水位变幅均符合0.15m/h和0.30 m/d的安全限幅,表明设计的蓄量动态调节算法很好地实现了闸前常水位运行。
(4)在分水口流量调整完成后的100~180 h,闸前水位偏差处在±0.15 m范围内,此时各闸门开度均维持不变(如图5所示),这体现了设置水位死区可减少闸门启闭,节约运行成本的作用。
(5)从图7可看出,在整个仿真过程中,各渠池的闸前水位始终呈现偏离其目标值的状态,反映了闸门运动死区作为一种非线性扰动,会持续带来控制误差的现象。
(6)从图5可看出,越位于上游,闸门操作次数越多,体现了渠道控制算法设计时(见式(5)),将偏差向上游方向传递以尽量消除扰动对下游影响的思想。
4.5 讨论
(1)蓄量动态调节控制算法中需设定的参数主要是蓄量校正时间ΔT,蓄量补偿流量变化量随之确定;ΔT越小,对应的蓄量补偿流量变化量越大,反之亦是。在设定蓄量补偿用时时,可在蓄量补偿流量不超过渠道设计流量的前提下,灵活平衡二者关系,使算法具有良好的适应能力。
(2)本文反馈控制采用的流量过程曲线形状为方波,与前馈控制中的流量过程曲线相似,其优势是二者叠加后形状仍为方波形状,对应的闸门操作次数少,便于实现,具有良好的实用性。
(3)开发蓄量动态调节算法基于的是流量平衡和蓄量平衡原理,由于其不受运行工况和环境变化的影响,不存在繁琐的参数率定问题,因而具有良好的适应能力。
5 结语
本文提出了一种适用于长距离明渠调水工程的控制算法,该算法以蓄量调节的方式,实时校正前馈控制过程中存在的偏差,实现渠道的运行要求。该算法基于简单的流量平衡和蓄量平衡原理设计,不需要复杂的参数率定,校正过程采用的流量过程曲线可灵活设定,具有良好的适用性。该算法在南水北调东线胶东段渠道上进行了仿真测试,结果表明其能够持续有效校正闸前水位偏差,限定闸前水位在给定的范围内。结合设定的水位死区,该算法有效应对了闸门运动死区的影响,减少了闸门操作次数,降低了闸门操作对下游输水的影响。
蓄量动态调节算法还可推广用于闸后常水位、等体积等其它运行方式,其实施过程中前馈控制算法可采用其它算法,反馈控制流量过程可采用其它形状的曲线,确定性能更为优良的反馈过程,相关工作有待后续开展。
参 考 文 献:
[1]Cui Wei,Chen Wenxue,Mu Xiangpeng,et al.Canal controller for the largest water transfer project in China[J]. Irrigation and Drainage,2014,63:501-511.
[2]Buyalski C P,Falvey H T,Rogers D S.Canal Systems Automation Manual Volume 1[M].Denver Colo:US Bureau of Reclamation,1991.
[3]David C Rogers,Jean Goussard.Canal control algorithms currently in Use[J].Journal of Irrigation and Drainage Engineering,1998,124(1):11-12.
[4]Shang Yizi,Rogers Peter,Wang GuangQian.Design and evaluation of control systems for a real canal[J].Science China,2012,55(1):142-154.
[5]崔巍,陈文学,郭晓晨,等.南水北调中线总干渠冬季输水过渡期运行控制方式探讨[J].水利学报,2012,43(5):580-584.
[6]Piao Xianshu,Burt Charles.Tuning Algorithms for Automated Canal Control[R].USA,Cal Poly,ITRC,ARI 04-3-005.
[7]Litrico X,Malaterre P O,Baume J P,et al.Automatic tuning of PI controllers for an irrigation canal pool[J]. Journal of Irrigation and Drainage Engineering,2007,133(1):27-37.
[8]Schuurmans J.Control of water levels in open-channels[D].Netherlands:Delft University of Technol,1997.
[9]van Overloop P J,Schuurmans J,Brouwer R,et al.Multiple-model optimization of proportional integral controllers on canals[J].Journal of Irrigation and Drainage Engineering,2005,131(2):190-196.
[10]Clemmens A J,Wahlin B T.Simple optimal downstream feedback canal controllers:ASCE test case results[J]. Journal of Irrigation and Drainage Engineering,2004,130(1):35-46.
[11]李炜,徐孝平.水力学[M].武汉:武汉水利电力大学出版社,2000.
[12]Bautista E,Clemmens A J.Volume compensation method for routing irrigation canal demand changes[J].Journal of Irrigation and Drainage Engineering,2005,131(6):494-503.
[13]崔巍,陈文学,穆祥鹏,等.明渠运行前馈控制改进蓄量补偿算法研究[J].灌溉排水学报,2011,30(3):12-17.
Dynamic regulation algorithm of volumes for long distance water division canal
CUI Wei,CHEN Wenxue,MU Xiangpeng
(State Key Laboratory of Simulation and Regulation of Water Cycle in River Basin,China Institute of Water Resources and Hydropower Research,Beijing 100038,China)
One to one correspondence of the volume and the water level upstream of check gate in canal pool is clarified,and accordingly,a water level control algorithm by means of volume dynamic regulation is put forward for a constant downstream depth operation canal.The algorithm is designed based on flow balance and volume balance in canal pools.It consists of a feedforward control section and a feedback control section.The former regulates canal pool volume according to offtake schedules,which is a coarse adjustment course.The latter corrects the water level errors emerging during the feedforward control period by regulation canal pool volume,which is a fine adjustment course.The algorithm has some merits such as simplicity in theory,having no tedious and difficult tuning process,flexibility in control rules,and well adaptation to operation condition variation.The control algorithm is tested on Jiaodong Section of East Route of South-to-North Water Diversion Project by numerical simulation.Both water level deadband and check gate movement deadband are simulated.Results show that delay in canal is well dealt with and all canal pools can be controlled properly.Water level errors are eliminated efficiently and water level fluctuations are confined within the safety range in all pools.
hydraulics;South-to-North water Diversion Project;control algorithm;constant downstream depth operation;deadband of check gate
TV67;TP273
A
10.13244/j.cnki.jiwhr.2015.06.004
1672-3031(2015)06-0421-07
2015-05-26
国家自然科学基金资助项目(51579251)
崔巍(1979-),男,河南焦作人,博士,教授级高级工程师,主要从事水力学及河流动力学研究。E-mail:joylife@126.com
猜你喜欢
价值工程(2022年27期)2022-10-10
人民珠江(2022年1期)2022-02-18
建材发展导向(2021年10期)2021-07-16
文物鉴定与鉴赏(2019年17期)2019-11-04
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
意林·少年版(2016年24期)2017-01-10
中国卫生(2016年12期)2016-11-23
新高考·高一数学(2016年3期)2016-05-19
杭州(2015年9期)2015-12-21