
基于ADAMS与ANSYS Workbench的码垛装备运动特性仿真分析
2015-05-11 03:12牟晓华高亚东
制造业自动化 2015年23期
许 哲,牟晓华,魏 鹏,高亚东
(上海海洋大学 工程学院,上海 201306)
基于ADAMS与ANSYS Workbench的码垛装备运动特性仿真分析
许 哲,牟晓华,魏 鹏,高亚东
(上海海洋大学 工程学院,上海 201306)
0 引言
随着科技的进步及企业生产自动化水平的提高,码垛机器人的应用越来越广泛,在大型食品饮料、化工和煤矿等企业中,现代码垛技术已经得到广泛应用,大幅度提高了企业的生产效率并降低了劳动成本[1]。而在一些特殊的企业仓库或厂房中,由于空间结构的特殊性,一般的码垛装备很难满足作业要求,其中像翅片机生产线上仍然采用人工搬运翅片的方式,不仅费时费力,且极易造成工人受伤。因此需要设计一种全新的自动码垛装备来满足翅片机生产线的特殊作业需求。根据翅片机生产线的具体码垛要求,设计了新型的4自由度的直角坐标型码垛装备。
1 自动喷涂装备的结构分析
图1给出了码垛装备的总体设计方案。码垛装备主要由导轨框架、电机驱动系统和电磁吸附模块组装而成。机器人的驱动系统为4个伺服电机,伺服电机的控制精度较高,能够实现对机器人的精确控制。码垛装备作业时,首先需要根据码垛作业的区域通过安装的导轨上的定位孔实现装备的初次定位,并完成电磁吸附模块在通电状态下对目标物体的定位及抓取任务,然后码垛装备会根据用户后期的特定指令完成码垛作业。在码垛装备沿x轴导轨移动时,装备会根据导轨上的定位孔实现实时定位,以确保装备能精确躲避固定障碍物(如悬梁、机械悬臂等)。当将目标物送到指定位置时,电磁吸附装置自动断电,在磁性消失的情况下,物体自动脱落,完成对目标的码垛作业。在装备作业过程中,框架的变形程度对满足作业精度要求方面有着重要影响,需要对其进行分析优化以满足作业需求,且本文选取z2框架作为研究对象。

图1 码垛装备总体视图
2 码垛装备三维模型的建立与仿真分析
2.1 Pro/E、ADAMS与ANSYS Workbench的联合仿真
对于Pro/E、ADAMS与ANSYS Workbench这三款软件都有各自的优势,如果能通过相互之间的通信接口进行文件信息传输,充分发挥各自优势特点,必定会提高计算的准确性和精确度。因此,采用三个软件联合仿真的方法对码垛装备进行分析。
刚柔混合动力学分析流程如图2所示。

图2 刚柔混合动力学分析流程
2.2 码垛装备有限元模型建立
2.2.1 模型的建立与导入
在Pro/E中完成码垛装备部分结构的三维实体建模,为方便在ADAMS中进行动力学仿真,在不影响分析结果的基础上,通过将装配体转化成单个零件的方法,把将要分析的部分装置简化为三部分:框架、导轨和滑块(包括携带的电磁吸附装置和翅片等),然后在通过Pro/E将其装配起来,并将文件存为Parasolid格式,拓展名为*.X_T类型的文件,便于后期导入到ADAMS中做准备。还有值得注意的是单位的设置,要使Pro/E、ADAMS与ANSYS Workbench中被分析的模型单位同一,本次仿真分析中的单位同一设置成mm Ks单位制。
2.2.2 利用ANSYS Workbench创建柔性体文件
ANSYS Workbench是ANSYS公司开发的一个协同仿真环境的软件平台,相比于经典版的ANSYS操作界面,Workbench界面形式更加明显,操作更加简单。针对于输出模态中性文件(*.MNF),使用Workbench操作更加方便、快捷且容易理解其操作意义。
1)导入模型。为保证MNF文件的正常导出,建议在导入Workbench模型之前,先通过Pro/E将需要柔性化处理的零件转化为*.sat格式,如果已经建立了Pro/E与ANSYS Workbench的连接,则可以在完成Pro/E中的操作后直接通过其菜单栏里的ANSYS选项将零件导入。另外要尽量保持零件的简洁性,不要带有太多缝隙或多余棱角等影响网格划分的因素。图3为待分析处理的z2框架,最好此时在后期可能需要建立刚性连接的地方建立印记面。
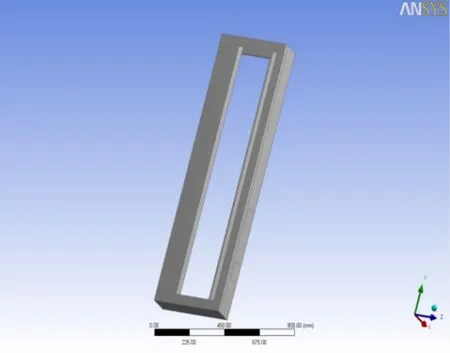
图3 待分析处理的z2框架
2)设置材料属性。通过Engineering Data选项来设置零件的各种材料属性。由于零件采用的是Q235号钢制造,在选定好钢类型后,定义其密度,ρ=7.85×103kg/m3泊松比μ=0.3,弹性模量E=2×1011Pa。
3)Model模块的处理。重点是网格的划分和APDL程序的导入与编辑。Workbench中的网格划分相比较于ANSYS经典更加方便、快捷。如图4所示,可以看出对于需要建立刚性联接的区域可以方便的设置其网格的疏密,且不需要通过手动对接触面上的节点进行刚性联接。只需在加载求解模块嵌入APDL程序,然后将需建立刚性区域的面的质心坐标编辑到程序里,在ADAMS中所需要的刚性区域连接mark点就会随着MNF文件的导入而自动产生。

图4 界面点位置与刚性连接区域
4)生成MNF文件。在完成APDL程序的导入、编辑后,先将完成的ANSYS Workbench工作保存一下,然后点一下工具栏里的Solve选项,计算完成之后,在之前保存的文件夹里就会有生成的MNF文件。
2.2.3 有限元模型的仿真分析及优化
将上一步生成的*.x_t文件导入到启动后的ADAMS中,重力大小设置为9806.6,方向为Y负向。利用Build/Flexible Bodies/Rigid to Flex导入之前产生的MNF模态中性文件,通过选取三点便可准确替换。刚柔替换后添加约束关系、驱动等,图5为建立的各构件与柔性体之间的约束关系。

图5 ADAMS各构件位置与约束关系
按要求末端电磁吸附装置的速度不能低于750mm/s,故将速度设置为800mm/s进行刚-柔体动力学仿真,得到如图6所示码垛装备中电磁吸附装置末端mark点Z向的位移。图中显示的Z向最大位移为4.16mm,而规定的定位精度不能大于1mm,故该框架零件是不合适的。通过对仿真过程中z2框架变形的观察,需对z2框架内部的两个肋板进行加厚,故将肋板厚度从7mm变成了10mm。将优化好的结构重新柔性化处理进行动力学仿真后,重新得出了电磁吸附装置末端Z向mark2点的位移,如图7所示。从图中可以看出Z向最大位移为0.43mm<1mm,符合喷涂要求。

图6 ADAMS中电磁吸附装置末端Z向mark点的位移

图7 ADAMS中电磁吸附装置末端Z向mark2点的位移
选取柔性体上形变量最大的一个顶点作为mark点来测量其mag向位移,如图8所示,其最大位移量为0.3mm。最后选择File/Export/FEALoads,导出柔性体边界载荷信息,即*.lod载荷文件。在输出载荷文件时要选取合适的时间点,尽量是柔性体受到最大载荷是的时间点。
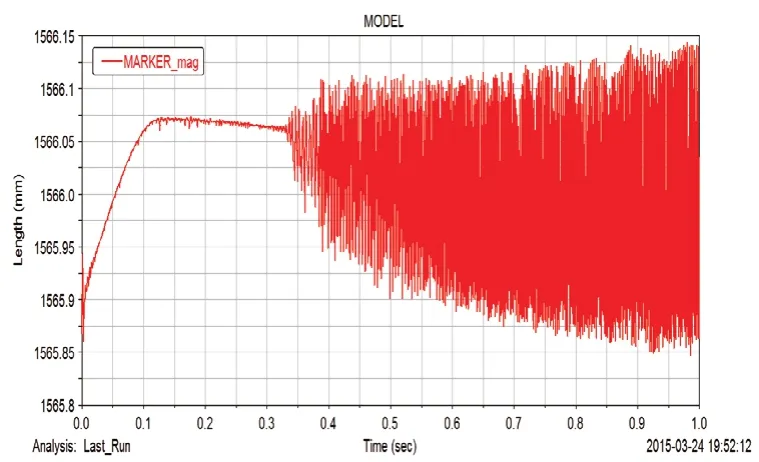
图8 ADAMS中柔性体顶端mark点的mag向位移
2.3 ANSYS Workbench有限元分析
启动ANSYS Workbench,打开之前保存的文件。进入model模块,对已经划分好网格的z2框架添加一定的约束,然后将*.lod载荷文件导入到之前编辑APDL程序的界面,最后点击求解即可。
查看有限元分析结果。
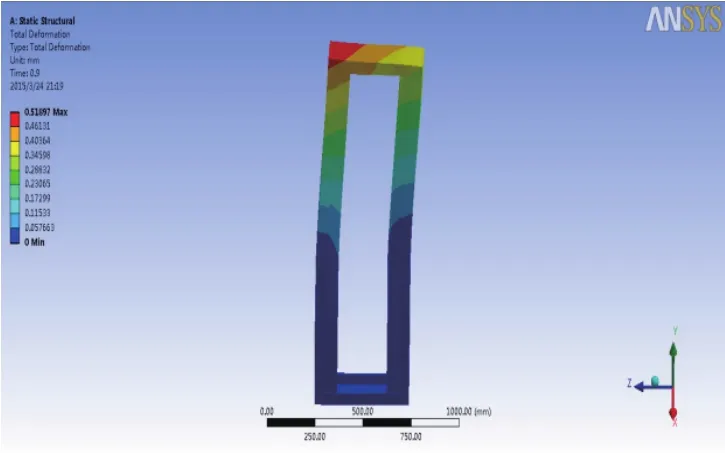
图9 变形云图
图9可以得出z2框架在ANSYS Workbench中变形为0.0577mm~0.5190mm与ADAMS中所测量的mark点的位移0.30mm结果几乎一样,因此可以认为ADAMS与ANSYS Workbench联合分析的结果是可靠的。

图10 应力云图
由图1 0可以看出z 2框架所受最大应力为59.996MPa,且钢的厚度≤10mm,远小于Q235号钢的屈服极限235MPa,符合应力要求,由此可以综合断定该框架是合适的。
3 结论
通过Pro/E、ADAMS与ANSYS Workbench的联合仿真实现了软件之间的优势互补,更加贴近现实的实现了结构动力学仿真,通过分析结果中的位移、变形、应力等,既可以避免了在建立数学模型基础上复杂的运算过程,同时在不同软件产生的数据相对比的基础之上,使得分析结果更具有说服力。综合分析结果来讲,被分析的框架结构能够满足安全的作业需求,同时也具备了通过计算机产生的精确的数据,从而为后续的其他方面的工作提供了依据。
[1]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J].包装工程,2011(2):96-101.
[2]肖潇,杨金堂,全芳成,等.基于Pro/E、ADAMS与ANSYS Workbench的小车底板运动特性仿真分析[J].制造业自动化,2015,37(1):58-60.
[3]张永德,汪洋涛,等.基于ANSYS与ADAMS的柔性体联合仿真[J].系统仿真学报,2008,20(17):4501-4504.
[4]赵希芳.A d a m s中的柔性体分析研究[J].电子机械工程,2006,22(3):62-64.
[5]李兵,何正嘉,陈雪峰.ANSYS Workbench设计仿真与优化[M].北京:清华大学出版社,2012.
[6]刘红军,张庆分.基于ADAMS的柔性体并联机构的变形及振动仿真分析[J].制造业自动化,2012,34(1):75-77.
[7]刘锦阳,洪嘉振.刚-柔耦合动力学系统的建模理论研究[J].力学学报,2002,34(3):408-414.
[8]Chen Y D,Cheng Y D,Liao J J,et al. Development of a finite element solution module for the analysis of the dynamic behavior and balancing effects of an induction motor system[J].Finite Elements in Analysis and Design,2008(44):483-492.
[9]Zheng Xiao-Ya,et.Application of ADAMS and ANSYS to mechanism analysis[J].GutiHuojianJishu/Journal of Solid Rocket Technology,2010,33(2):201-204.
[10]Ni Li,et.The dynamic simulation of engine slider-crank mechanism based on ANSYS and ADAMS[J].Advanced Materials Research,2014,842:347-350.
[11]Zeng Hong,et.The CAE analysis of fork truck frame system based on ADAMS and ANSYS[J].Applied Mechanics and Materials,2009,16:1149-1153.
Simulation and analysis of motion characteristics of palletizing equipment based on ADAMS and ANSYS Workbench
XU Zhe, MOU Xiao-hua, WEI Peng, GAO Ya-dong
在对传统的码垛装备工作特性的研究及市场的需求基础之上,设计出了一种针对翅片机生产线特定工作环境的作业灵活、操作简单且精度高的新型直角坐标型自动码垛装备。由于装备采用的是直角坐标型,为确保装备能满足高精的作业要求,需对易出现变形的轨道支撑框架进行受力分析。仿真过程利用Pro/E、ADAMS与ANSYS Workbench在自身领域的优势共同完成对框架的运动受力分析,同时对ADAMS与ANSYS Workbench的仿真结果进行比较,得出精确的运动特性仿真结果,最终判断是否进行结构优化。
码垛装备;框架;ADAMS;ANSYS Workbench
许哲(1970 -),男,副教授,博士,研究方向为预测控制理论与应用。
TH122;TH164
A
1009-0134(2015)12(上)-0005-04
10.3969/j.issn.1009-0134.2015.23.02
2015-07-20
上海市“联盟计划”基金项目(D-8005-14-0115)
猜你喜欢
机械工程师(2022年6期)2022-06-21
资源信息与工程(2021年5期)2022-01-15
西安交通大学学报(2021年11期)2021-11-16
军民两用技术与产品(2021年9期)2021-03-09
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
电子制作(2019年20期)2019-12-04
制造技术与机床(2019年10期)2019-10-26
中国生物医学工程学报(2019年4期)2019-07-16
