
并联式踝关节康复机器人研究
2015-05-08 10:09韩亚丽于建铭宋爱国朱松青张海龙吴在罗
东南大学学报(自然科学版) 2015年1期
韩亚丽 于建铭 宋爱国 朱松青 张海龙 吴在罗
(1东南大学仪器科学与工程学院, 南京 210096)(2南京工程学院机械学院, 南京 211167)
并联式踝关节康复机器人研究
韩亚丽1,2于建铭2宋爱国1朱松青2张海龙2吴在罗2
(1东南大学仪器科学与工程学院, 南京 210096)(2南京工程学院机械学院, 南京 211167)
针对目前踝关节康复机器人不同程度地存在机构自由度冗余、机构复杂、控制难度较大等问题,采用了一种3-RUPS/S型并联机构用以实现踝关节康复运动.对康复机器人机构进行设计,采用D-H法对机构的位置反解进行分析, 得到其驱动杆长随姿态角度的变化关系.利用数值解析法进行位置正解分析,并结合电动推杆的电位器数据及姿态传感器检测的动平台姿态角的变化信息实施康复机器人样机的控制.实验结果表明,踝关节康复机器人能够带动踝关节进行康复训练,满足人体踝关节的运动需求.
踝关节康复机器人;并联机构;运动学分析;样机实验
踝关节是人体主要的活动关节,当人在行走时,全身的重量都落在踝关节上面,此外,在进行跑、跳等动作时,需依赖踝关节各方向的转动协调完成.由于人体能够完成的很多动作都有踝关节的参与,使得踝关节扭伤是一种常见的骨科疾病.踝关节受伤恢复慢,易造成脚部浮肿和慢性疼痛,使踝关节不能长时间受力,故进行踝关节康复机构的研究对于帮助患者完成各种运动功能的恢复性训练极为重要.国内外针对下肢踝关节康复机器人已进行相关研究[1-8],Girone等[9]基于Stewart平台进行了带有虚拟现实力反馈可远程控制的踝关节康复机器人研究,Stewart平台采用了6个双气缸,实现六自由度运动.其研究的六自由度的康复机器人远满足于踝关节的运动自由度,从而增加了机构及控制的复杂度.Dai等[10]提出将三自由度或四自由度的并联机构作为踝关节康复机构,这样并联机构的复杂程度、控制难度和样机制造成本都得到了大幅下降,还使动平台的自由度集中于转动自由度上.构型为3-SPS/S的并联机构具有3个转动自由度,由3根可伸缩的支杆和1根中心杆将动、静平台相连.构型为3-SPS/PS并联机构的中心支撑杆设计为1个移动副串联1个球铰,该并联机构就具有4个自由度,提高了踝关节康复训练过程中的舒适性.中心支撑杆不仅限制了水平方向的2个移动自由度,而且还增强了机构的承载能力.文献[11-12]进行了系列并联式康复踝关节康复机器人的研究,并进行了踝关节康复样机的设计,其相关研究对新型生物融合式康复机器人的研发具有重要的指导意义.刘更谦等[13-14]也进行了踝关节康复并联机器人的相关研究,研制的3-RSS/S踝关节康复并联机器人由动平台、静平台和3条相同的支链构成,每条支链由1个转动副和2个球铰串联而成,电机通过转动副提供驱动力,该机构具有3个转动自由度,可以帮助踝关节扭伤患者进行康复训练.此外,文献[15]也进行了冗余驱动的并联式踝关节康复机器人的研究.
针对目前并联式踝关节康复机器人普遍存在的机构复杂、控制难度较大的问题,本文提出一种基于3-RUPS/S型并联机构实现踝关节3个转动自由度康复运动的机器人,通过移动副提供驱动力,具有机构紧凑、易于控制等特点.
1 并联式踝关节康复机器人设计
根据人体踝关节的结构解剖图可知,踝关节是由小腿的胫骨和腓骨远程关节面与距骨滑车构成的复杂关节.踝关节的结构表明了其具有3个转动自由度[15],分别为:① 背伸和跖屈. 背伸的范围为-25°~-30°,跖屈的范围为40°~50°.② 内收和外展.内收的范围为25°~30°,外展范围为-25°~-30°.③ 内翻与外翻.内翻范围为-35°~-40°,外翻范围为15°[16].为了满足踝关节康复训练的要求,合理地选择机构是非常重要的.
本文提出了一种新型的三自由度并联机构的模型,如图1所示.该并联机构是由动静平台、3条RUPS支链和1根约束轴4个分支构成.上平台为动平台,下平台为静平台.3条相同支链自下而上由1个轴承(转动副R)、1个虎克铰U、1个电动推杆(移动副P)、1个球铰S串联而成,它下端通过轴承与静平台过盈配合固连在一起,使得RUPS支链只能围绕着静平台旋转;它的上端通过球铰与动平台相连.约束轴由1个球铰来约束动平台的3个移动自由度,使其可以实现绕三轴的旋转运动,同时提高了机构的刚度,增强了机构的承载能力.
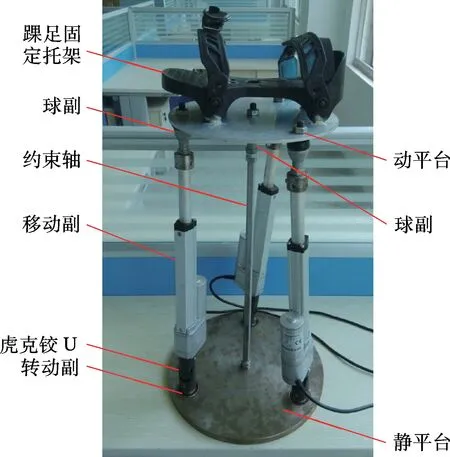
图1 3-RUPS/S踝关节康复机器人的机构
所设计的踝关节康复机器人是一个3-RUPS/S的并联机构,空间机构自由度m的计算式为
式中,n为机构的总构件数;g为机构的运动副数;fi为第i个运动副的自由度数.根据上式可以求出该机构的自由度数.3-RUPS/S并联机构的构件数n=11,运动副数g=13,包括3个转动副、3个虎克铰U、3个移动副、4个球铰S,其中每个转动副有1个自由度(f=1),每个万向节有2个转动副(f=2),每个移动副有1个自由度(f=1),每个球铰有3个自由度(f=3),同时又有3个局部的转动自由度,故
(3×1+3×2+3×1+4×3-3)=3
由自由度公式计算结果可知,该踝关节康复机器人有3个转动自由度,可以满足踝关节康复的需要.
2 踝关节康复机器人运动学分析
2.1 踝关节康复机器人运动模型的建立
踝关节康复并联机器人机构是通过3条支链将动、静平台连接起来的闭环机构.在3-RUPS/S 并联机构中,有3条相同的支链,每条支链从下到上依次为:转动副R、虎克铰U、移动副P、球铰S;第4条支链为中心杆,只有1个球铰连接动、静平台,机构模型图如图2所示,静平台上3条支链的3个点C1,C2,C3分别位于直径为320 mm的外接圆上,动平台上3条链的3个点D1,D2,D3分别位于直径为250 mm的外接圆上,静平台厚度为10 mm,动平台厚度为5 mm,动静平台之间的距离为500 mm.
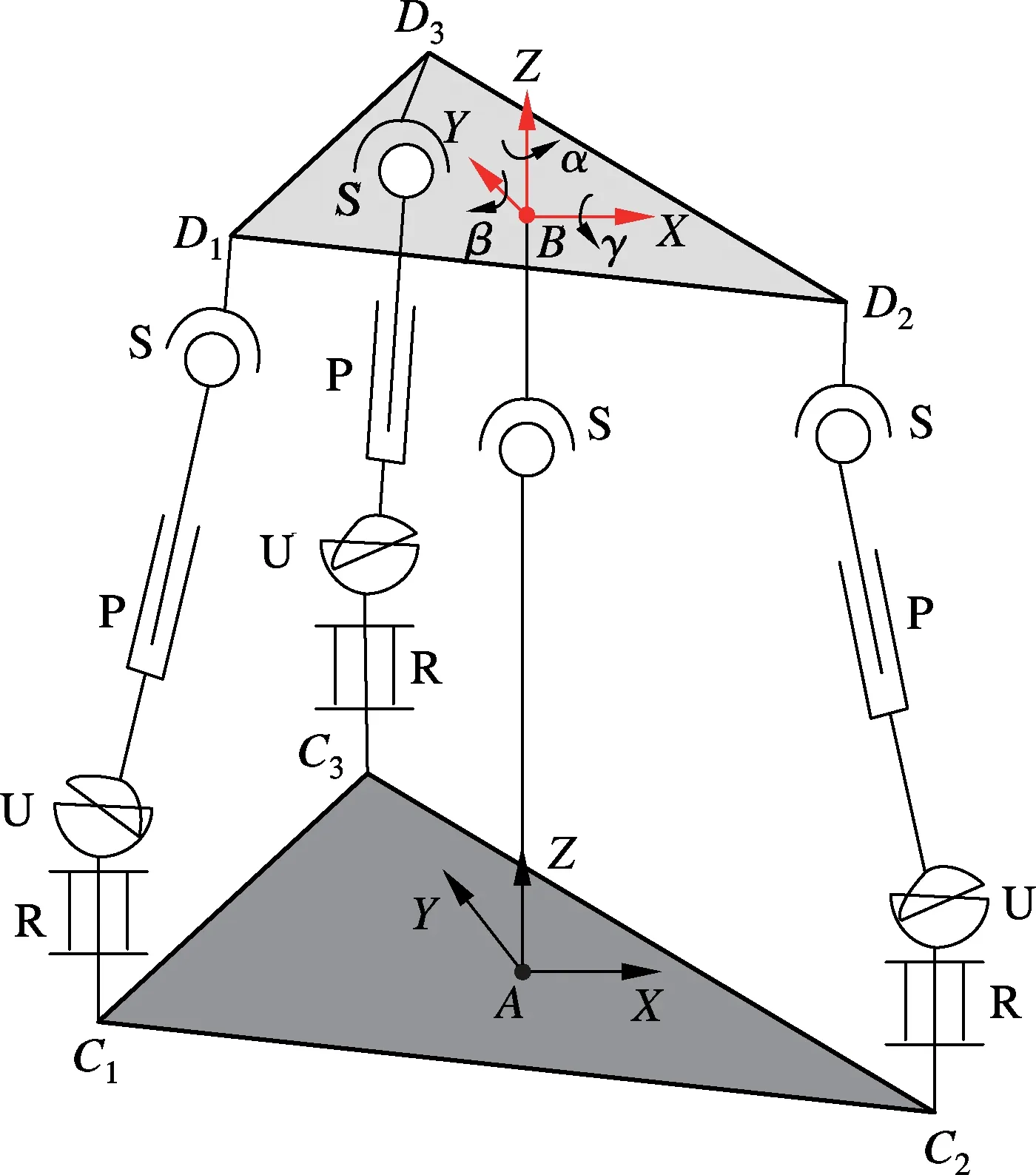
图2 并联式踝关节康复机器人模型
2.2 踝关节康复机器人位置反解分析
描述并联机器人的位姿是研究机器人运动学的基础,用矩阵来描述机器人的运动学,这种数学方法是将三维坐标增广为四维坐标,以一个四阶方阵来描述刚体的旋转和平移,能够将平移、旋转与矩阵运算联系起来.对于选定的坐标系{A},空间中任意点P的位置可用3×1 的列向量表示,即
(1)
式中,PX,PY,PZ是点P在坐标系{A}中分别沿X,Y,Z的分量.
为了描述空间某刚体B的方位,需要在刚体B上建立一直角动坐标系{B}与刚体B的固接.用动坐标系{B}的3个单位主矢量BX,BY,BZ分别与静坐标系{A}的AX,AY,AZ构成的方向余弦矩阵来表示刚体B在坐标系{A}中的位置姿态,即

(2)


(3)
空间任意点P在两坐标系{A}和{B}中的位置矢量分别为AP和BP,则它们之间具有以下变换关系:
(4)
基于上述理论分析,设动坐标系B-XYZ为定坐标系A-XYZ沿Z轴平移(0,0,500)后,绕Z轴转α角,绕Y轴转β角,最后绕X轴转γ角,则其欧拉角转换矩阵为

(5)
通过Matlab编程求解,由式(4)可求出AP,故动平台上的3点的坐标为D1(D1X,D1Y,D1Z),D2(D2X,D2Y,D2Z),D3(D3X,D3Y,D3Z),其中
52.5cosαsinβsinγ
52.5sinαsinβsinγ
52.5cosαsinβsinγ
52.5sinαsinβsinγ
D3X=-105sinαcosγ+105cosαsinβsinγ
D3Y=105cosαcosγ+105sinαsinβsinγ
D3Z=105cosβsinγ+500
结合机构特点与两点之间的距离公式,可得杆长为
(a) 杆长L1
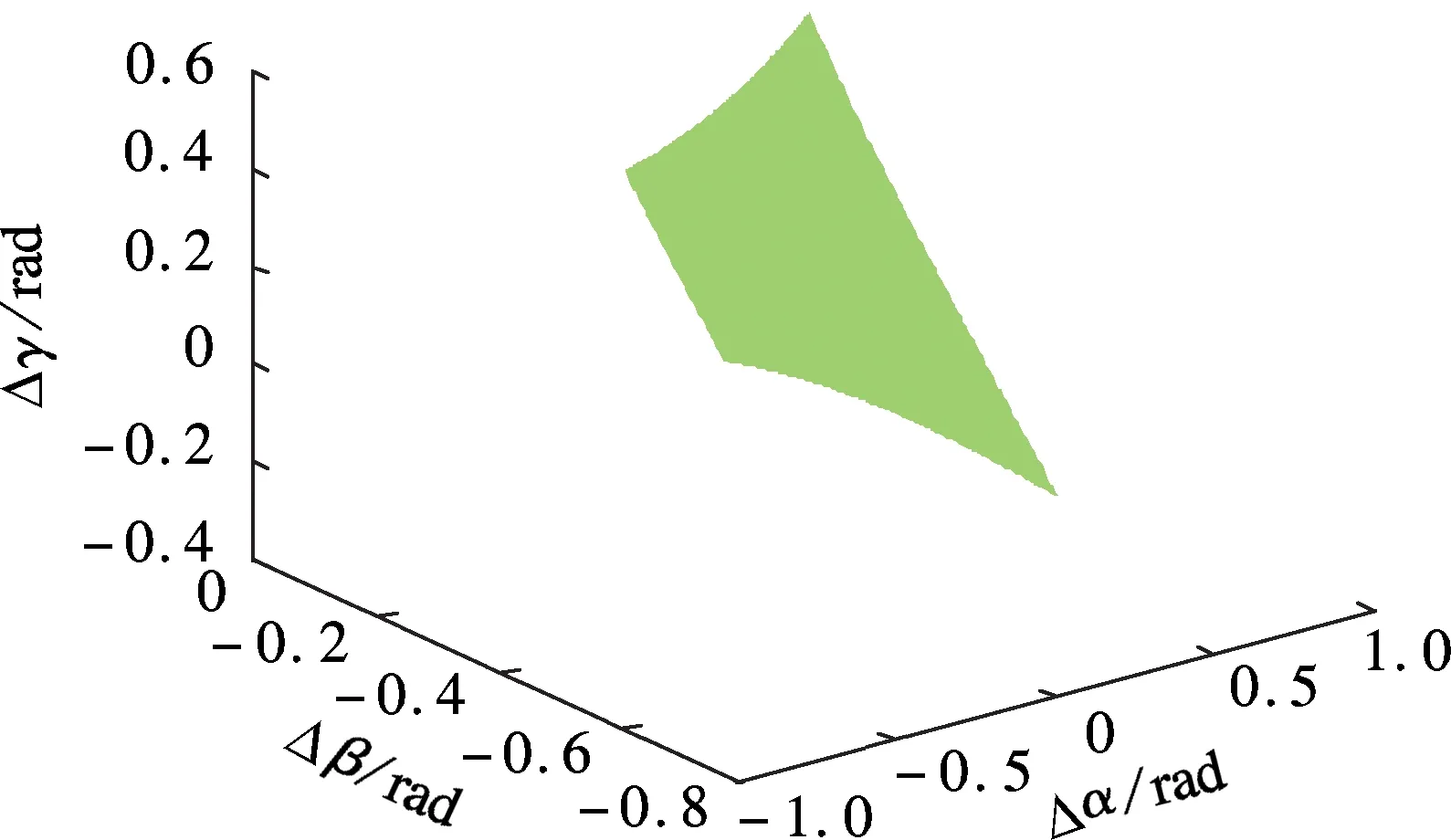
(b) 杆长L2
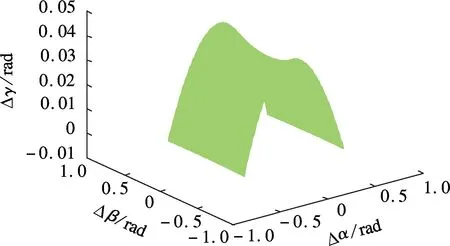
(c) 杆长L3
2.3 踝关节康复机器人位置正解分析
由于并联机构比串联机构复杂,求解位置正解有一定的难度.本文结合并联机构的位置反解结果利用数值解法进行求解,其基本的求解原理是利用机构的反解逐步循环迭代完成的.数值法简单实用,为并联机构运动过程中的控制和检测提供了一定的参考.

(6)
而Li是关于动平台绕3个轴的α,β,γ转角的函数,即
Li=Li(α,β,γ)
(7)
故3个驱动杆长与动平台的转动角速度有如下关系:
(8)
(9)

(10)


3 踝关节康复机器人样机及实验
选用带电位器和行程开关的电动推杆(24 V直流电机)作为踝关节康复机器人样机的动力源,选用AQMH2403ND电流驱动模块为电动推杆供电.选用ZTLV-USB7600-2数据采集卡来采集电动推杆末端的电位器的电压值,进而来计算电动推杆的位置.选用NANO-AHRS传感器系统对动平台的姿态进行检测.由电动推杆的位置及动平台姿态角的变化信息,结合2.3节的踝关节康复机器人位置正解分析进行康复机器人样机的控制,控制系统流程图如图4所示.上位机通过USB通讯方式与数据采集卡相连,并根据踝关节康复运动的需要给电流驱动模块发送2路开关量(用于驱动电机的正反转)和PWM脉冲(用于改变电机的运行速度)实施样机控制.在踝关节康复机器人样机平台上安装角度传感器,对动平台在3个转动轴上的运动进行实时检测.
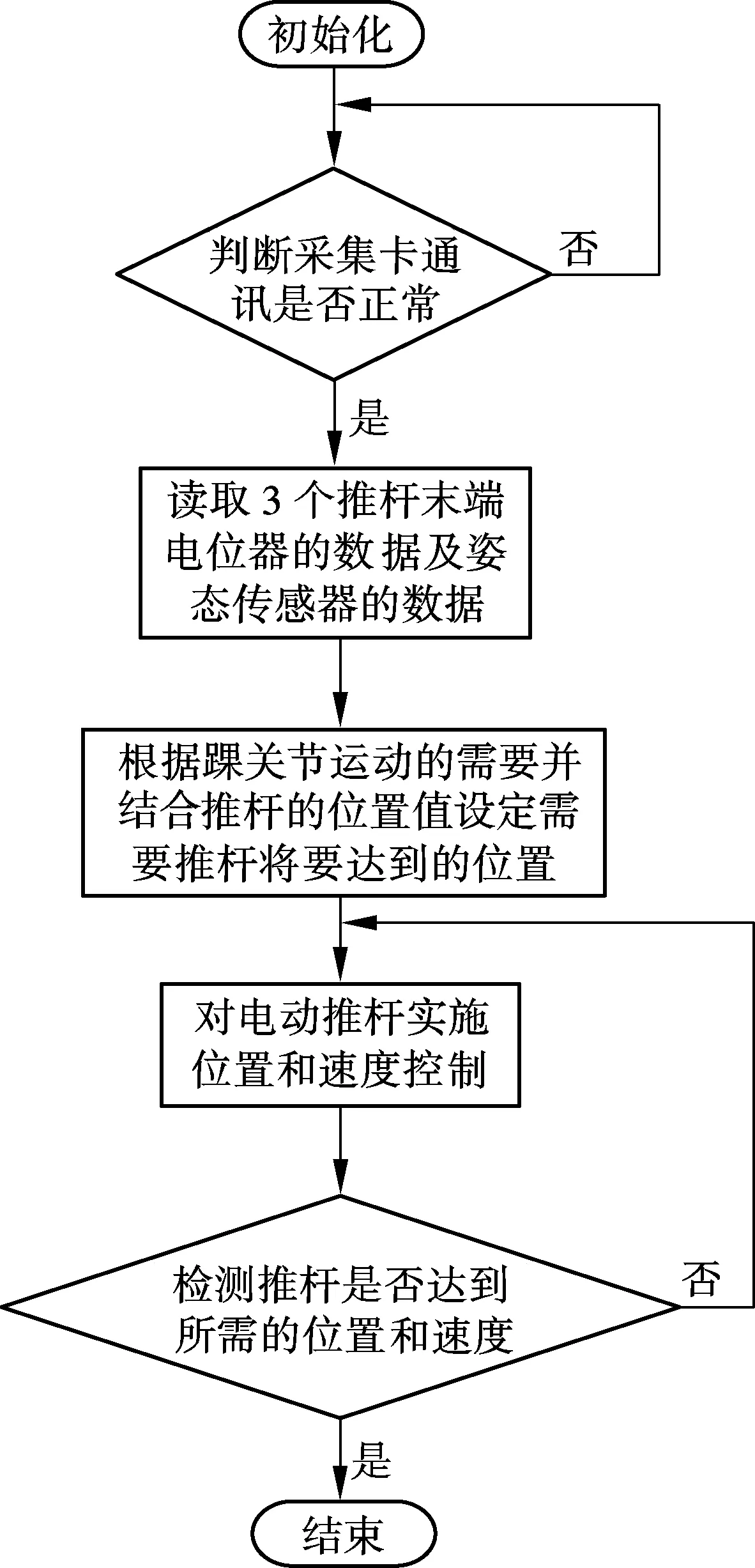
图4 控制系统流程图
对一名健康青年男性进行踝关节康复机器样机穿戴实验.实验过程中,康复机器人运动过程中6种典型的踝关节姿态如图5所示,角度传感器检测出的踝关节在3个轴上的转动角度如图6所示.
分析实验结果可得,踝关节康复机器人能实现踝关节的跖屈/背伸、外展/内收及外翻/内翻,且该样机的运动角度范围大于人体踝关节正常的运动范围,即该康复机器人能满足踝关节康复运动需求.

(a) 跖屈

(b) 背伸

(c) 外展

(d) 内收

(e) 外翻

(f) 内翻
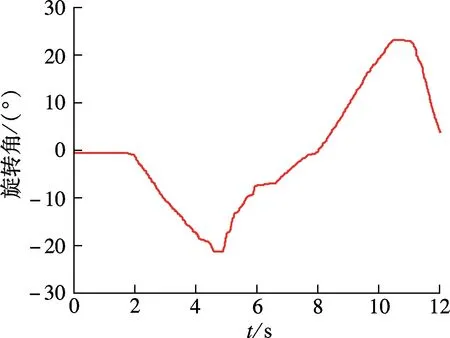
(a) 绕X轴的旋转角度
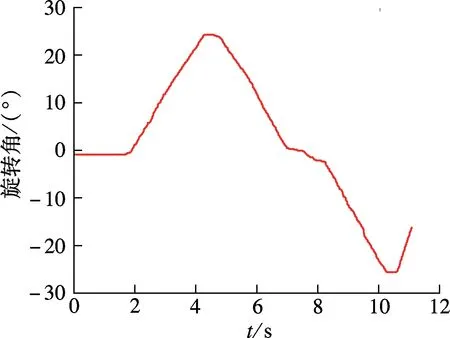
(b) 绕Y轴的旋转角度
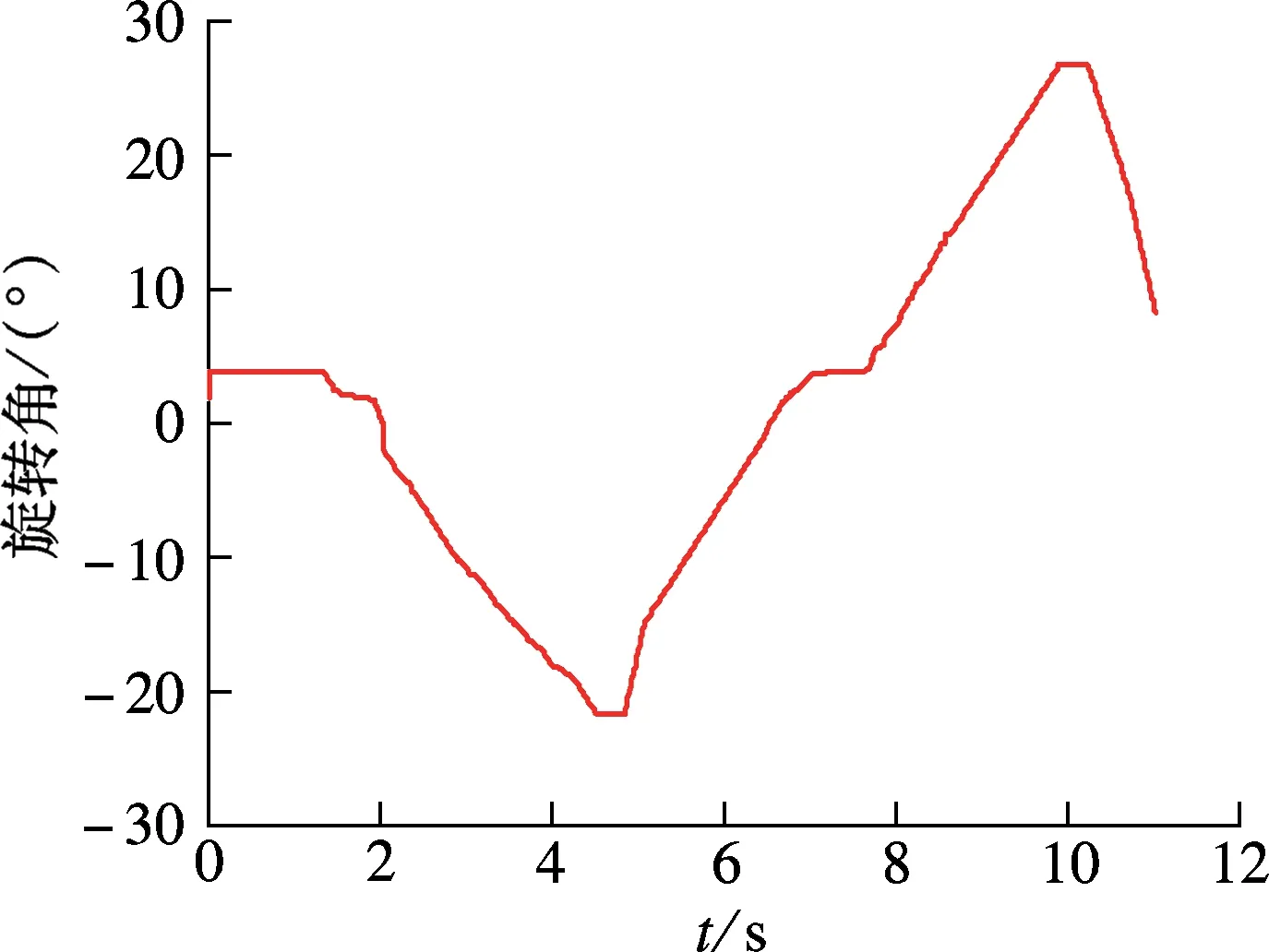
(c) 绕Z轴的旋转角度
4 结语
现有的踝关节康复机器人不同程度地存在机构自由度冗余、机构复杂、控制难度较大等问题,本文提出了一种3-RUPS/S型并联机构用以实现踝关节的跖屈/背伸、外展/内收及外翻/内翻.给出并联机构的位置反解的显式表达式,利用数值解析法进行位置正解分析,并结合电动推杆的电位器数据及姿态传感器检测的动平台姿态角的变化信息实施康复机器人样机的控制.实验结果表明,踝关节康复机器人能够带动踝关节进行康复训练,满足人体踝关节的运动需求.
References)
[1]Boian R F, Bouzit M, Burdea G C, et al. Dual stewart platform mobility simulator[C]//IEEE26thAnnualInternationalConferenceonEngineeringinMedicineandBiologySociety. San Francisco, CA,USA,2004: 4848-4851.
[2]Yoon Jungwon, Ryu J. A novel reconfigurable ankle/foot rehabilitation robot[C]//ProceedingoftheInternationalConferenceonRoboticsandAutomation. Barcelona, Spain, 2005: 2290-2295.
[3]Saglia J A, Tsagarakis N G, Dai J S, et al. Inverse-kinematics-based control of a redundantly actuated platform for rehabilition [J].JournalofSystemsandControlEngineering, 2009, 223(1): 53-70.
[4]Kaufman K R, Irby S E, Mathewson J W, et al. Energy-efficient knee-ankle foot orthosis: a case study[J].JournalofProstheticsandOrthotics, 1996, 8(3): 79-85.
[5]Fan Yuanjie, Yin Yuehong. Mechanism design and motion control of a parallel ankle joint for rehabilitation robotic exoskeleton[C]//IEEEInternationalConferenceonRoboticsandBiomimetics. Guilin, China, 2009: 2527-2532.
[6]Bi Z M. Design of a spherical parallel kinematic machine for ankle rehabilitation[J].AdvancedRobotics, 2013, 27(2): 121-132.
[7]Syrseloudis C E, Emiris L Z, Lilas T, et al. Design of a simple and modular 2-DOF ankle physiotheraphy device relying on a hybrid serial-parallel robotic architecture[J].AppliedBionicsandBiomechanics, 2011, 8(1): 101-114.
[8]Jamwal P K, Xie S Q, Hussain S, et al. An adaptive wearable parallel robot for the treatment of ankle injuries[J].IEEE/ASMETransactionsonMechatronics, 2014, 19(1): 64-75.
[9]Girone M, Burdea G, Bouzit M, et al. A stewart platform-based system for ankle telerehabilitation[J].AutonomousRobots, 2001, 10(2): 203-212.
[10]Dai J S, Zhao T, Nester C. Sprained ankle physiotheraphy based mechanism systhesis and stiffness analysis of a robotic rehabilitation device[J].AutonomousRobots, 2004, 16(2): 207-218.
[11]边辉,赵铁石,田行斌,等.生物融合式康复机构及其应用[J].机器人,2010,32(4):470-477. Bian Hui, Zhao Tieshi, Tian Xingbing, et al. Rehabilitation facility with biological integration and application [J].Robot, 2010, 32(4): 470-477. (in Chinese)
[12]窦玉超,姚建涛,高思慧,等.冗余驱动并联机器人动力学建模与驱动协调分配[J].农业机械学报,2014,45(1):293-300. Dou Yuchao, Yao Jiantao, Gao Shihui, et al. Dynamic modeling and driving force coordinate distribution of the parallel robot with redundant actuation[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2014, 45(1): 293-300. (in Chinese)
[13]张小俊,刘更谦,张明路.一种踝关节康复机器人的控制系统设计[J]. 机器人技术,2009,25(3/2):259-284. Zhang Xiaojun, Liu Gengqian, Zhang Minglu. An ankle rehabilitation robot control system design[J].Robotics, 2009, 25(3/2): 259-284. (in Chinese)
[14]Liu Gengqian, Gao Jinlian, Yue Hong, et al. Design and kinematics analysis of parallel robots for ankle rehabilitation[C]//IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems. Beijing, China, 2006: 253-258.
[15]Wang Congzhe, Fang Yuefa, Guo Sheng, et al. Design and kinematical performance analysis of a 3-RUS/RRR redundantly actuated parallel mechanism for ankle rehabilitation[J].JournalofMechanismsandRobotics, 2013, 5(4): 041003-01-041003-10.
[16]李良标,吕秋萍.运动生物力学[M].北京:北京体育大学出版社,2003:65-120.
Parallel robot mechanism for ankle rehabilitation
Han Yali1,2Yu Jianming2Song Aiguo1Zhu Songqing2Zhang Hailong2Wu Zailuo2
(1School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China) (2School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing 211167, China)
A novel 3-RUPS/S parallel mechanism is presented for ankle rehabilitation to solve the existing problems about redundant degrees of freedom, complicated mechanism and difficult control. The robot with parallel mechanism is designed, the inverse kinematics of the mechanism is given based on D-H method, and the driver length with the change of rotation angle of parallel mechanism is outputted through programming. The forward kinematics of the mechanism is analyzed based on the numerical analysis method, and the control of rehabilitation robot prototype is implemented based on potentiometer data of linear actuator and pose angle data of mobile platform through the attitude sensor. The experiment results show that the parallel mechanism for ankle rehabilitation can realize rehabilitation training of ankle joint and meet the requirements of ankle rehabilitation.
robot for ankle rehabilitation; parallel mechanism; kinematics analysis; prototype experiment
2014-07-30. 作者简介: 韩亚丽(1978—),女,博士,副教授;宋爱国(联系人),男,博士,教授,博士生导师, a.g.song@seu.edu.cn.
国家自然科学基金青年基金资助项目(51205182)、江苏省自然科学基金资助项目(BK2012474)、江苏省大学生创新项目资助项目(201311276009Z).
韩亚丽,于建铭,宋爱国,等.并联式踝关节康复机器人研究[J].东南大学学报:自然科学版,2015,45(1):45-50.
10.3969/j.issn.1001-0505.2015.01.009
TP242
A
1001-0505(2015)01-0045-06
猜你喜欢
宝钢技术(2022年4期)2022-12-23
中华老年多器官疾病杂志(2022年10期)2022-11-21
中国特种设备安全(2022年4期)2022-07-08
机械管理开发(2022年5期)2022-07-07
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
中国棉花(2017年10期)2017-11-04
中国核电(2017年1期)2017-05-17
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
