
岸边集装箱起重机人机功能分配方法的研究
2015-05-07 09:48王浩严伟陆后军
机械工程师 2015年4期
王浩, 严伟, 陆后军
(上海海事大学 物流工程学院,上海 201306)
0 引言
国际自动化集装箱码头发展至今已有30a左右的历史,其发展大体可分为四个阶段[1]:第一代以荷兰鹿特丹码头I期和II期为代表;第二代以Altenwerder码头为代表;第三代以ECT码头设计建设中的Europmax码头为代表;第四代以即将启用的厦门远海码头为代表。根据自动化码头的发展,能看到其中的装卸工艺不是完全的自动化,而仅仅是部分功能的自动化,因此作业过程中仍然需要人机的协同操作。
近年来,国内外学者对于人机功能分配做了多项研究。2012年,空军工程大学工程学院柳平等人引入多目标模糊决策的数学方法,建立了人机功能分配的一般模型,为飞机设计中合理进行人机功能分配提供了一种新的参考方法。2011年7月,佐治亚理工大学航空航天工程学院的So Young Kim等人从机器部分的智能性(mostly-automated),操作人员的独立性(mostlymanual),人机结合的协调性(mixed)和智能组件的优先性(highly-automated)四个方面建立了复杂工作环境下人机功能分配的衡量标准的模型。目前比较常用的人机功能分配的分析方法有:比较分配法、剩余分配法、经济分配法、概率期望值指标法、动态分配法等。
作为自动化桥吊驾驶系统设计的核心内容,人机功能分配的合理性极其重要。过度的智能化容易造成桥吊司机的依赖性增强和态势感知能力的降低,并且系统的开发代价会过高;但是过低的系统智能化容易造成桥吊司机工作量过大,使其认知能力下降,工作效率下降。因此如何评判岸桥驾驶中的人机功能分配设计的合理性[2],是自动化码头发展进程中必须解决的核心任务之一。
1 岸边集装箱起重机作业功能分析
通过对集装箱码头作业的调研学习,可以把岸桥的装卸船过程分解为以下几步:作业前检查、岸桥就位、小车平移、吊具下降、吊具与集装箱对接、吊具起升、小车后退、吊具下降、集装箱卸载到集卡和吊具回升。
在功能分配原则设定中,问题的关键是对桥吊司机和自动桥吊驾驶系统分配何种任务。通常情况,驾驶员的许多工作优势正好是自动化的缺点,而自动化的有些工作优势也是驾驶员的缺点,两者在岸桥作业时可相辅相成。根据两者的特点,进行合理的功能分配,即可实现现代岸桥的高效作业。具体可参考表1所列出的人机各自的优势特性。
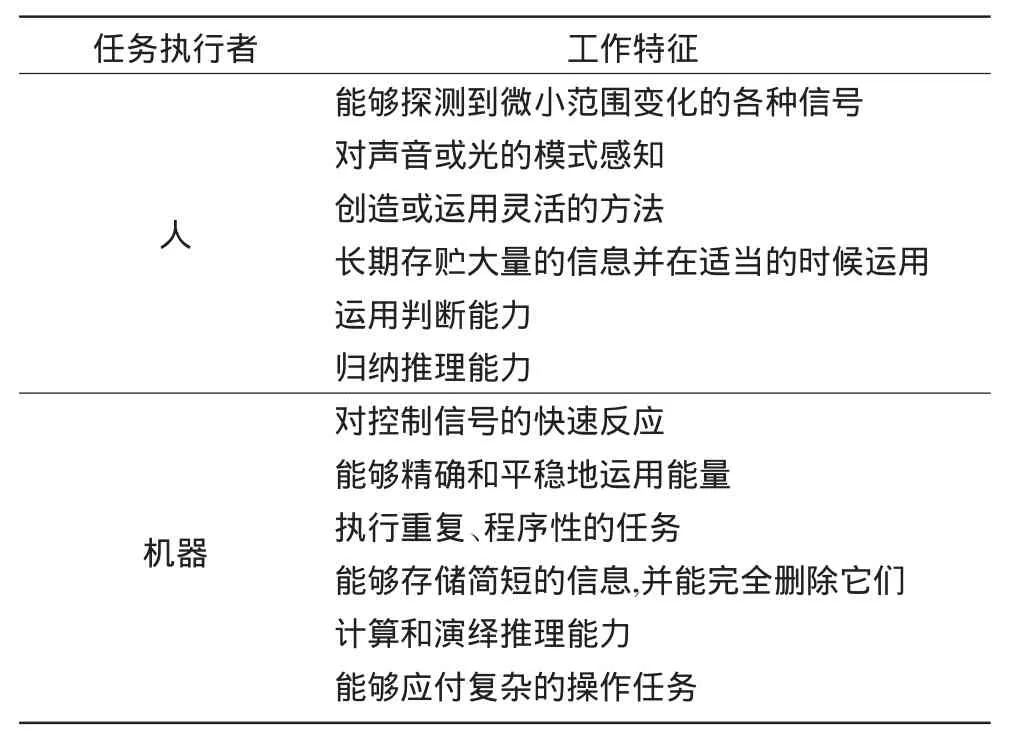
表1 Fitts人机能力对比表
根据岸桥的作业流程,对操作过程中各个步骤(即作业前检查、岸桥就位、小车平移、吊具下降、吊具与集装箱对接、吊具起升、小车后退、吊具下降、集装箱卸载到集卡和吊具回升)进行分解,可绘出岸桥作业中各步骤的作业轨迹如图1所示。得到如表2所示的功能分配的可能性分析结论。
在岸边集装箱起重机的所有操作步骤中,选取何种类型的操作进行功能分配的分析需要根据桥吊司机的能力、自动化的水平、分配的可能性和作业的可靠性进行确定,确定的基本原则如下:1)在所有的操作中,流程简单,桥吊司机可独立完成的任务,分配给桥吊司机操作;2)在所有操作中,衔接不同操作过程并能影响作业效率和安全性的操作,除了提供自动控制外,需要引入桥吊司机的监督控制的备份,确保作业可靠性;3)桥吊司机和自动控制系统各自负责的具体作业范畴应有一定的可发挥性,以减少不必要的干涉,达到合理作业的协调性;4)在进行不同作业的功能分配时,应考虑到桥吊司机的操作水平、反应时间(特别是多个任务时间窗口叠加的情况)、作业的可靠性和该操作的复杂性。

图1 岸桥及其作业轨迹图

表2 岸桥作业中可能的人、机功能分配
功能分配是指设计者对各种不同现有条件(包括桥吊司机和自动控制系统)规定所要完成的各种作业任务,也就是说需要设计者根据不同的任务分配用于完成该任务的各种已有条件。目前对岸边集装箱起重机的人机功能分配还没有相对成熟的方法,由于岸桥的作业过程受多种复杂因素的影响,存在许多的不确定性,不能单纯地从一个方面来评价功能分配的合理性,因此需要建立一种可以把多种因素同时引入评价系统[3]的数学方法,以达到桥吊作业中的人机协同工作、密切配合,达到系统效率的最大化。人机功能分配作为现代岸桥设计的基本决策之一,直接影响着岸桥的系统结构、司机室界面的设计、系统软硬件的配置等,并在很大程度上决定着实际操作过程中驾驶员和系统的相互作用,在整体上影响岸桥的性能发挥、装卸效能、可靠性、成本以及桥吊司机的工作负荷。
2 岸边集装箱起重机功能分配模型
在实际生活中,对于无法精确描述的问题,采用传统的决策方法无法进行分析说明,而通过引入模糊数学[4]的方法则可以相对清楚地说明问题。同样,对于岸桥作业人机功能的分配,其系统的设计难度、支持费用、可靠性、操作的复杂性、乘员安全、人机系统的各自优越性以及维护性等影响因素都无法精确地描述。显然要考虑如此多的对人机系统完成任务的影响因素,应采用多属性模糊决策的数学方法来进行综合的分析。因此,可以建立一个广义的多目标模糊决策模型,通过各指标值对最佳指标值的模糊接近距离z来描述分配方案的优劣。
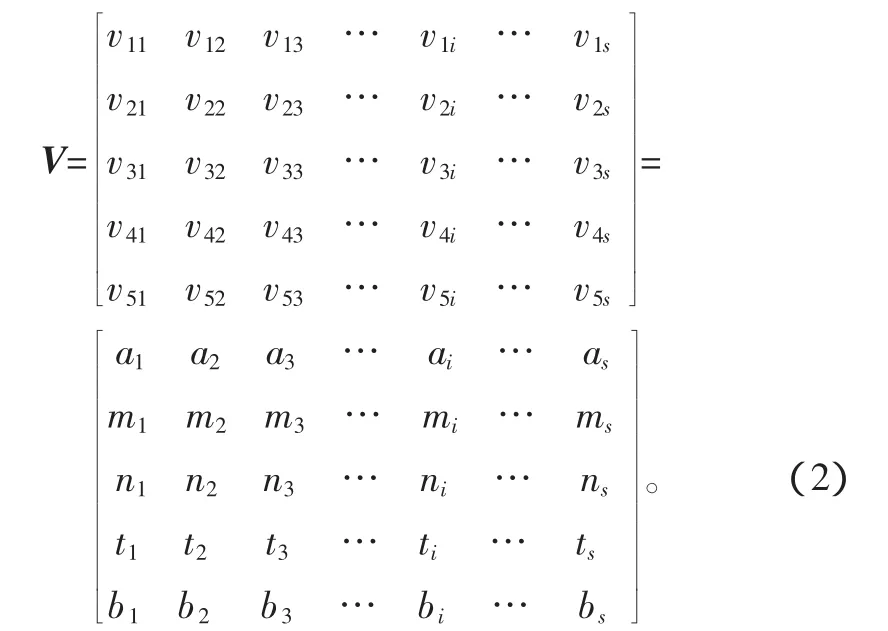
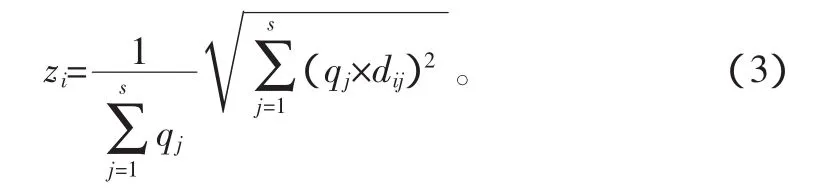
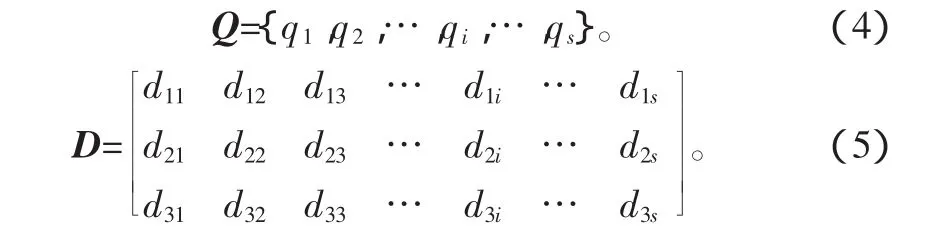
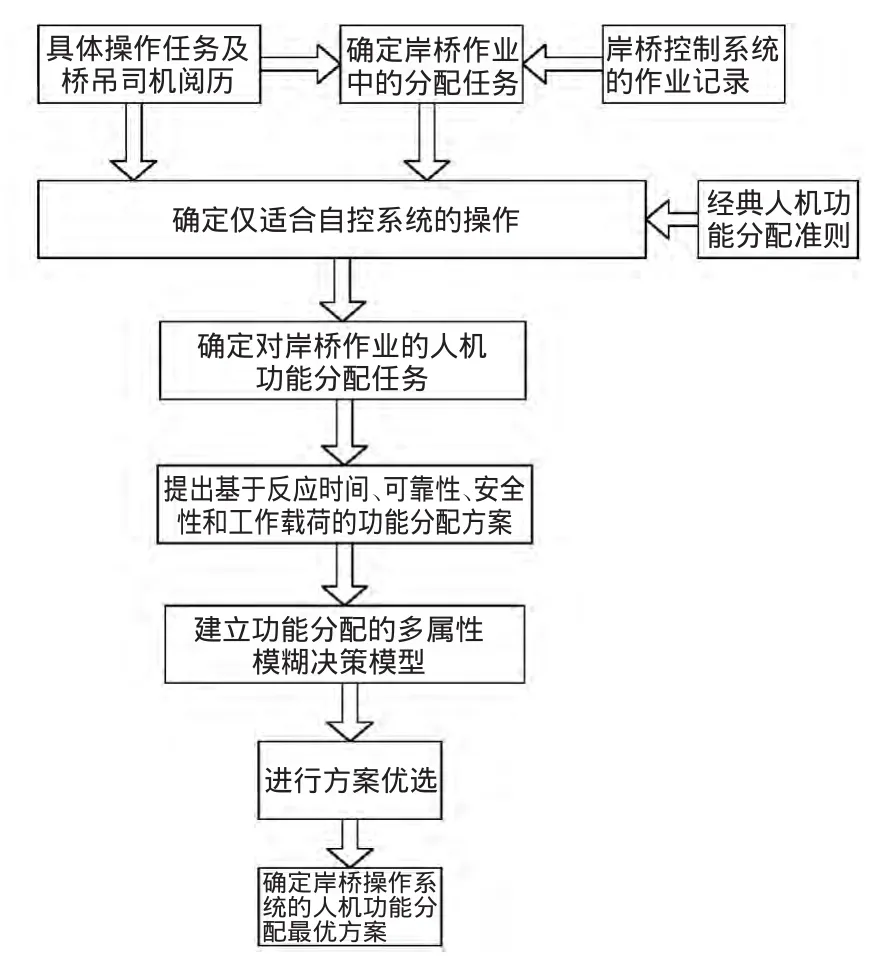
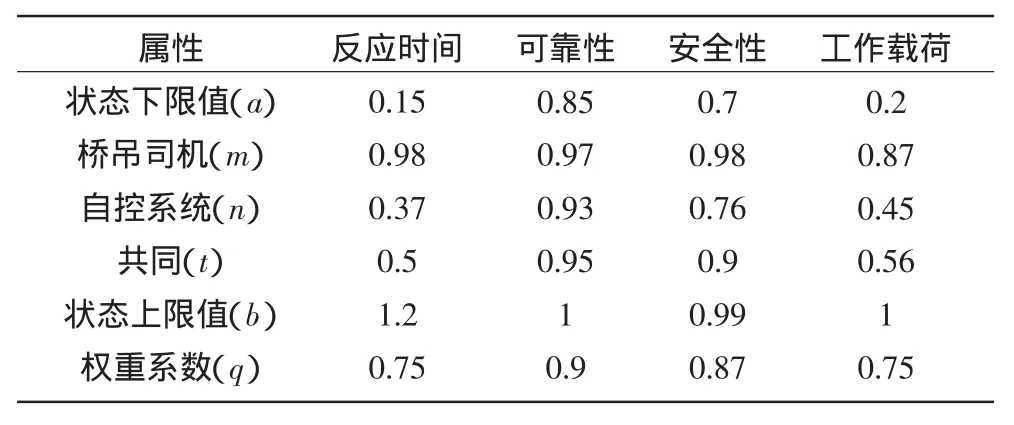
设根据所需得到的评价属性集[5]为 E={E1,E2,…,Ei,…,Es},其对应的各属性值为e={e1,e2,…,ei,…,es},各属性值的下限值为A={a1,a2,…,ai,…as},各属性值的上限值为B={b1,b2,…,bi,…,bs},其中的上下限的取值ai、bi、为评价属性E的定义域,即当ai 定义如下的功能分配属性值集,任务分配给桥吊司机的各属性值为M={m1,m2,…,mi,…,ms},任务分配给自动控制的各属性值为N={n1,n2,…,ni,…ns},桥吊司机和自动控制共同完成任务的各属性值为T={t1,t2,…,ti,…ts}。V为所有的属性值所构成的矩阵。 定义各属性值对最优方案的模糊接近的最优权重距离为 其中:qj为各属性变量的权重系数;dij为各属性变量的模糊关系矩阵。 其中对各属性变量间的模糊关系与各属性变量值之间的关系定义如下: 如何在分析判断任务时将上述的模型进行细化,是人机系统设计的重要过程。在岸桥作业过程中,其流程实际上也是一个反复细化的过程,在细化过程中要求将整个作业分解成最基本的、细小的能够具体分配到桥吊司机或者自控系统的操作任务。对于数学模型来说即确定不同操作任务的组成及其约束,因此可以在最基本的操作任务上对决策模型进行分析,使得每个操作任务可以最优地分配给桥吊司机或者自控系统来完成,该分配过程如图2所示。 图2 岸桥系统人机功能分配过程 图3 数据收集及操控界面图 由表2可知,对岸桥作业的分解中,对人机功能分配比较理想的过程是小车的平移过程。为了说明该模型,对岸桥作业过程中的小车水平运动进行功能分配,通过建立的数学模型,进行分配决策,确定其执行方式。 通过分析得知,小车的水平运动既可以由桥吊司机单独完成,也可以由自控系统单独完成,同时也满足两者的合作完成。在研究过程中,主要考察反应时间、可靠性、安全性和工作载荷4个属性,其所对应的属性值可参考专家调查法并采用现已具有的实验条件(岸桥仿真训练器,图3)进行采集确定。 应用德尔斐法,确定各属性值的权重系数向量为 根据多属性模糊决策理论及式(2)和我们所采集的数据整理得到的属性值矩阵为 根据所选属性所具有的特性以及综上所获得的参数,得各属性值如表3所示。 表3 岸桥小车水平运动功能分配的属性值表 由以上属性指标表得到理想的最佳方案为(0.15,1,0.99,0.2)。 根据式(6),对所考虑的4个属性之间的模糊关系矩阵D求解如下: 根据式(3),各属性值对最优方案的模糊接近的最优权重距离,得出各属性的功能分配方案对最优方案的最优权重距离如下, 最优方案的目标函数为 Zi=min(Z1,Z2,Z3),由所得结果可知 Z3=min(Z1,Z2,Z3)。因此,根据最终结果可知,由桥吊司机和自控系统共同执行小车的水平运动为最优方案。可假设在执行的过程中,桥吊司机主要负责对小车水平运动过程的监督任务,可以将剩余的其他时间来完成其他相重叠的任务,以保证岸桥作业高效可靠地进行。 在港口机械的发展,特别是在岸桥的设计中对双小车双吊具复杂系统的操作,使桥吊司机的作业任务和作业难度越来越大,同时桥吊司机的能力也有一定的限度。针对上述问题,本文提出的基于桥吊司机反应时间和系统可靠性的属性值均能达到最佳的人机功能分配,可将桥吊司机从繁琐的操作任务中解脱出来,使其更好地完成监督、处理和决策的任务,最好地发挥桥吊司机和自控系统的工作效能,确保岸桥高效可靠地完成集装箱吊运任务。本文讨论了在岸桥作业中桥吊司机和自动控制系统的人机功能分配问题,是功能分配在港口机械作业任务中的一次应用尝试,提出了岸桥操作系统的人机功能分配的一些分配原则和方法,建立了多属性模糊决策的最优方案比选模型,通过模糊决策使得对任务的描述性分析转变为与量化分析相结合方法。通过上述的案例分析表明:该方法对岸桥作业中人机功能分配的整体任务分析或具体操作任务分析具有一定的参考价值,同时该方法也能应用到自动化码头系统设计大趋势中。 [1] 致远.厦门远海码头将启用全球首个第四代全自动化码头装卸系统[J].中国远洋航务,2012(11):30-31. [2] 刘希.岸桥仿真训练器司机操作自动评估系统[D].上海:上海海事大学,2013:81. [3] 廖斌.基于层次分析法和模糊综合评判法的人机系统价值评价[J].经营管理者,2009(20):187. [4] 周诗华,周前祥.采用模糊决策的功能分配模型及其应用[J].人类工效学,2004(4):2-3. [5] 李希灿,冯绍军,杨清海,等.多目标多维模糊决策模型的模糊交叉算法[J].模糊系统与数学,2004,18(3):102-108. [6] 周前祥,马治家.载人航天器系统人机功能分配方法的研究[J].系统工程与电子技术,2000(8):2-3. [7] 邱惠清,卢凯良.国际自动化集装箱码头技术发展述评[C]//第八届物流工程学术年会,2008:8. [8] 施笑畏,牛延华.基于行为分析的桥吊司机操作规范研究[J].计算机光盘软件与应用,2013(2):69-70. [9] 陈良玉.岸边集装箱起重机司机操作专家系统的设计与实现[D].上海:上海海事大学,2006:82. [10] 周莉.可视化人机交互决策相关技术研究[D].南京:南京理工大学,2002:78. [11] Kim S Y.Model-based metrics of human-automation function allocation in complex work environments[D].Georgia,US:Georgia Institute of Technology,2011.

3 案例分析




4结语
猜你喜欢
军事文摘(2023年5期)2023-03-27
青少年科技博览(中学版)(2022年6期)2022-08-31
起重运输机械(2021年21期)2021-11-24
南都周刊(2021年3期)2021-04-22
现代装饰(2019年7期)2019-07-25
专用汽车(2018年10期)2018-11-02
中国公路(2017年8期)2017-07-21
中国铸造装备与技术(2017年3期)2017-06-21
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
