
基于ADAMS的仿人机器人步态仿真与分析
2015-05-07 09:48安志亮李卫国王利利蔡长亮
机械工程师 2015年4期
安志亮, 李卫国, 王利利, 蔡长亮
(内蒙古工业大学a.机械学院;b.工程训练中心,呼和浩特 010051)
0 引言
仿人机器人是机构、驱动、传感等核心部件,以及仿生、交互、智能等技术的一种综合集成平台,是当今机器人领域最为前沿的课题之一,同时实现稳定步行又是仿人机器人研究领域的热点和难点。稳定步行是仿人机器人最基本的类人行为方式,也是实现其它行为的基础,仿人机器人因其灵活的步行能力而具有广泛的应用前景[1]。同时仿人机器人又是一个多自由度多刚体系统[2],由于其自由度多因此运动具有复杂性和不确定性。应用虚拟样机技术可以简化仿人机器人设计过程中的复杂性和不确定性,能使运动与动力学分析更加直观更具有可操作性。使用ADAMS这一系统仿真软件,可以在各种虚拟环境中真实地模拟系统运动并进行分析,从而达到系统运动的优化设计。因此应用ADAMS软件对仿人机器人步态进行仿真分析具有重要意义。
本文利用Pro/E软件对机器人的零部件进行设计并且进行了装配,在Pro/E环境下完成了机器人的三维建模。然后导入到ADAMS中进行了运动仿真,并且进行了运动分析,最后针对分析结果对仿人机器人步态规划进行了优化设计。
1 机器人的结构模型
如图1所示利用Pro/E对该仿人机器人本体设计进行建模。机器人由脚部、膝部、腿部、胯部、背部、肩部、手部、头部组成。其中的脚部、膝部、腿部、胯部、肩部、手部、头部都用舵机来实现。各部分通过舵机及舵机支架以及必要的连接件连接起来。由于仿人机器人行走主要是靠下肢,同时要兼顾人体行走各部分运动的协调性所以对机器人的上肢进行了简化设计。Pro/E中装配图如图1。
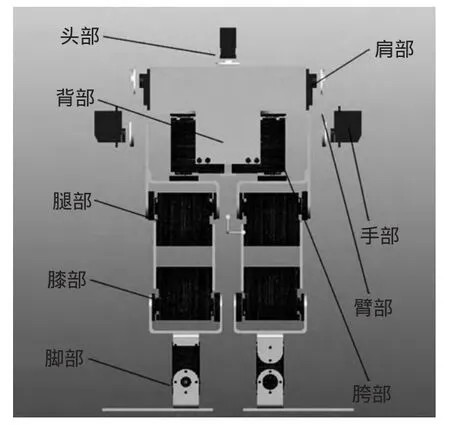
图1 仿人机器人的装配图
2 机器人的仿真模型
首先将在Pro/E中建立的模型导入到ADAMS中。在ADAMS中对各零部件定义材料密度属性或质量属性,然后定义各种约束副、运动副,施加载荷,并可对关键的变量建立测量输出,这样就建立起了仿真模型[3]。仿真模型建立结果如图2所示。

图2 仿真模型图
该模型中地板与大地采用固定副连接,其他各个关节采用转动副连接以保证所设计的自由度。同时要对仿真环境进行设定,对于在ADAMS中建立仿真环境的问题,应该遵循最大程度地模拟实际环境的原则来进行解决,本文中考虑到重力、机器人脚底与地面的摩擦、脚底和地面的接触力等诸多因素。
在仿人机器人的左脚板与地板、右脚板与地板之间分别定义接触,接触参数如表1。
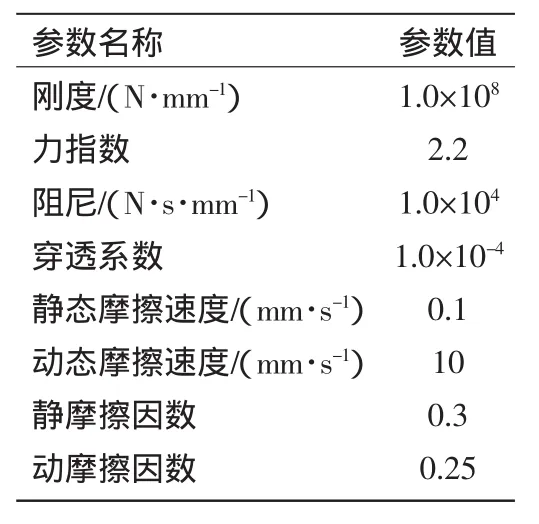
表1 接触参数表
3 运动学及动力学仿真分析
3.1 仿人机器人的步态规划
仿人机器人步态周期包含2个周期:单腿支撑周期和双腿支撑周期。在双腿支撑周期,仿人机器人双脚都与地面接触,这个周期起始于前腿的后脚跟与地面接触,结束于后腿脚趾离开地面时。单腿支撑周期指仿人机器人一条腿与地面接触,另一条腿从后面离开地面摆动到前面与地面接触这段时间。双腿支撑周期一般占整个步态周期的20%左右[4]。针对本文所设计的机器人,机器人的行走由双腿支撑周期开始,在双腿支撑周期内仿人机器人首先通过双脚关节的运动把机器人的重心转移到单腿支撑的一侧,同时一只脚逐渐离开地面,双腿支撑周期结束,进入单腿支撑周期,通过支撑的单腿关节和单膝关节的配合运动,仿人机器人的重心向前移动,移动之后摆动腿向前移动迈出一大步,迈步之后通过双脚关节的旋转机器人的摆动脚落地,单腿支撑期结束又一次进入了双腿支撑期。这样就完成了一个完整的步态周期。仿人机器人向前行走完全可以看做是步态周期的循环往复,在循环的过程中摆动腿和支撑腿每2个步态周期进行一次变换。
3.2 仿人机器人步态仿真
仿真过程中一个步态周期设定为4 s,仿真的结束时间设定为8 s,仿人机器人由立正到完成2个步行周期。运动仿真的序列关键帧如图3所示。
3.3 仿真结果分析
仿真开始之前分别在PART23的质心点设定了Measure,由于PART23部件是整个上半身的质心点。因此可以从PART23的质心点的移动轨迹来反映出仿人机器人在整个步行过程中重心的移动轨迹。图4表示的是仿人机器人的重心在行走过程中沿水平方向的位移,可以反映出仿人机器人行走的连续性,同时可以根据位移除以时间来算出仿人机器人的行走速度。图5表示的是仿人机器人的重心沿垂直方向的位移,可以看出在行走过程中重心在垂直方向上的位移在适当的允许范围内。图6表示的仿人机器人重心在行走过程中左右摇摆的幅度。可以在图中清晰地看出优化后的机器人重心在水平方向上的位移更加平滑。但是在垂直方向上波动比优化前的幅度要大。总体来说优化之后的步态规划要优于之前的。
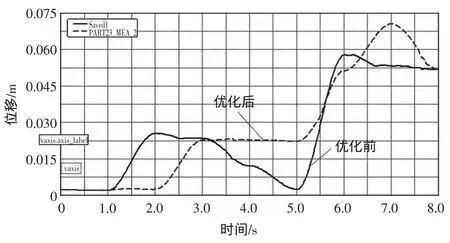
图4 PART23质心位置沿x轴方向随时间的变化曲线
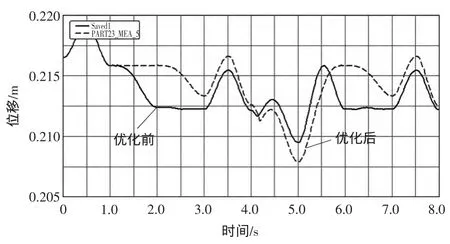
图5 PART23质心位置沿y方向随时间的变化曲线
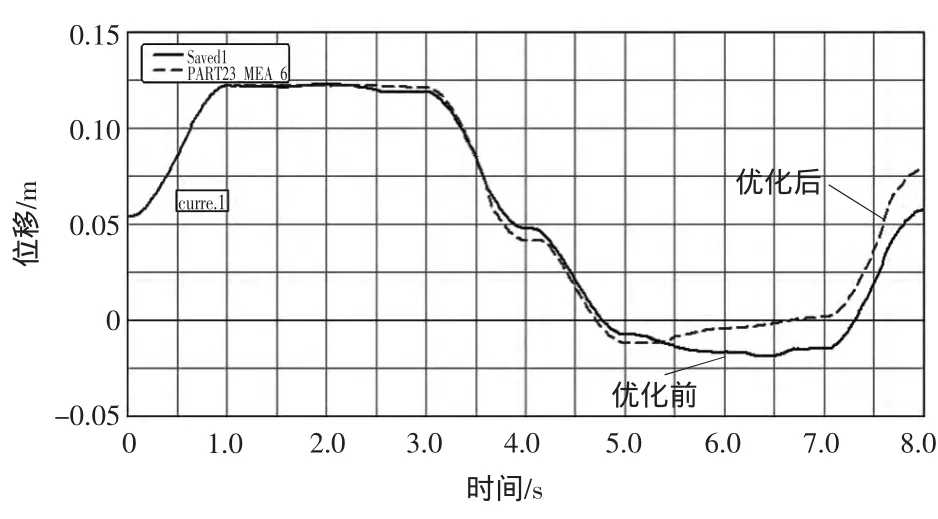
图6 PART23质心位置沿z方向随时间的变化曲线
4结语
本文通过Pro/E对机器人的结构进行了建模,然后导入到ADAMS中,在ADAMS对各零部件定义材料密度属性或质量属性,然后定义各种约束副、运动副,施加重力和接触力并可对关键的变量建立测量输出。随后对仿人机器人进行了步态规划,并根据步态规划设定Motion中STEP函数的值,最后对仿人机器人进行了步态仿真并对仿真结果进行了分析,并且机器人步态进行了步态优化。
[1] 付根平.仿人机器人的步态规划和步行控制研究[D].广州:广东工业大学,2013.
[2] 李敬,黄强,余张国,等.人体步行规律与仿人机器人步态规划[J].中国科学,2012(9):42-9.
[3] 杨春光,赵世平,陆小龙,等.基于虚拟样机的攀爬机器人仿真分析[J].机器人技术,2009(2):73-75.
[4] Qiang Huang,Yokoi,K,Kajita S,et al.Planning Walking Patterns for a Biped Robot[J].IEEE Tran.on Robotics and Automation,2001,17:280-289.
[5] 刘晋霞,胡仁喜,康士延,等.ADAMS2012从入门到精通[M].北京:机械工业出版社,2013.
猜你喜欢
保健与生活(2021年3期)2021-02-22
妈妈宝宝(2019年10期)2019-10-26
智族GQ(2019年3期)2019-06-11
传感器与微系统(2018年7期)2018-08-29
知识经济·中国直销(2018年6期)2018-06-29
发明与创新(2017年25期)2017-07-24
发明与创新·大科技(2017年7期)2017-07-17
现代制造技术与装备(2016年12期)2016-04-06
智能系统学报(2015年4期)2015-12-27
恋爱婚姻家庭(2015年36期)2015-09-22
