变形杠杆的教学探究
2015-05-05 21:28陈万民
内蒙古教育·综合版 2015年5期
陈万民


杠杆是一种极其简单的机械装置,在人们的生产生活实践中都有着广泛的应用。初中二年级的物理课本中,就出现了有关杠杆的基本内容,课文中指出:一根硬棒,在力的作用下,绕着一固定点转动,这根硬棒就是杠杆。通过对杠杆相关知识的学习,学生对杠杆有了初步的了解,但是对于一些变形后的杠杆却难以理解。比如滑轮、轮轴之类的机械中既没有“杠”也没有“杆”,怎么能称之为“杠杆”呢?这种变形杠杆和学生的主观认知产生了严重冲突。要想解决好有关“变形杠杆到底是不是杠杆”的问题,就必须弄明白构成杠杆的基本要素和杠杆的基本原理问题。
一个完整的杠杆装置系统由五种基本要素组成:杠杆的支点、动力、动力臂、阻力、阻力臂。它的构成如图1所示:
动力:使杠杆转动的力叫动力。
阻力:阻碍杠杆转动的力叫阻力。
动力臂:从支点到动力作用线的垂直距离叫动力臂。
阻力臂:从支点到阻力作用线的垂直距离叫阻力臂。
一个杠杆在这五要素作用下如果它是静止或匀速转动的我们就说此杠杆处于平衡状态。杠杆的原理及平衡的条件是:
动力×动力臂 = 阻力×阻力臂
F1×L1=F2×L2
(如果 L1> L2 则为省力杠杆,如果L1< L2则为费力杠杆)
从以上的叙述中可以得知,如果一个机械系统既满足了杠杆构成的“五要素”,又完全遵循杠杆的平衡条件,那么这个系统就称之为杠杆。因此对于一个机械装置来说,我们不能“以貌取人”,不管它的外部形态如何,只要它具有构成杠杆的全部要素,符合杠杆的基本原理(F1×L1=F2×L2),我们就理所应当地认为它是杠杆。
对初学者来说,之所以发生变形杠杆不是杠杆这种“不识庐山真面目”的现象,其原因就在于对杠杆本质认识的不深、不透,只注重机械装置的表面形态的异同(只知道杠杆是一条直杠),不从机械装置的结构所包含的要素及隐含的原理和实际应用的效果上去认知,这是一种纯粹的机械唯物主义认知观。当你对杠杆的原理有了更透彻的认识,才能做到“不求形似但求神似”,才会明白杠杆不但有直的,还有弯曲的,甚至它可以是圆形的。
所有杠杆的基本原理都是相同的,但是由于杠杆在实际生活中的用处不同,它可以表现出不同的外部形态,以此外部形态我们可以把杠杆分为三类 :
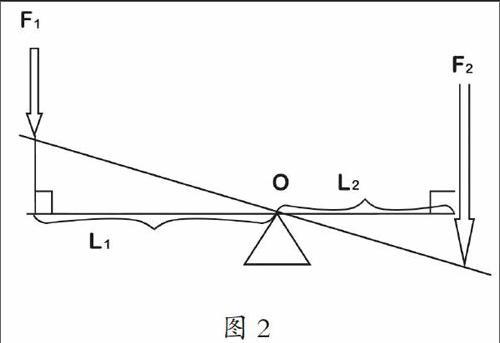
一、机械外观构成形态是一条直杠的杠杆
这样的杠杆是最基本的杠杆形式,也是学生心目中的“标准杠杆”。如图2:杠杆中的五要素:支点O、动力F1、动力臂L1、阻力F2、阻力臂L2均已标明。现实生活中的跷跷板、人体做俯卧撑、吃饭使用的筷子、称量用的秤、人力推动的独轮车等等都属于这种简单的杠杆。
二、机械外观构成形态是一条弯曲的曲杠的杠杆
如图3:自来水井就是由曲杠构成的杠杆。这样的杠杆并不是一条直杠而是一条曲杠,O是支点,F1是动力,L1是阻力臂,F2是阻力,L2是阻力臂。杠杆中的动力臂和阻力臂并不在同一条直线上,但他仍然符合杠杆平衡原理:动力×动力臂=阻力×阻力臂(F1×L1=F2×L2)。汽车中的脚踏刹车、起钉子用的羊角锤都属于这种杠杆。
三、机械外观构成形态是一个圆形的杠杆
这种杠杆最具有代表性的是滑轮和轮轴,如图4甲中就是一个定滑轮的杠杆原理分析:F1、F2分别是动力和阻力,定滑轮的中心就是杠杆的支点O,L1、L2分别是动力臂和阻力臂,因为图中的L1=L2,所以定滑轮并不省力,而在动滑轮图乙中,因为L1=2L2,所以动滑轮能省力一半,是一种省力杠杆。
图4轮轴就是一个轮轴杠杆的示意图,图中的轴心就是轮轴杠杆的支点,F1、F2分别是杠杆的动力和阻力,大圆的半径OA和小圆的半径OB,分别是轮轴杠杆中的动力臂和阻力臂,这样的轮轴是一个省力杠杆。其实在日常生活中,像这样的轮轴杠杆有很多,比如汽车的方向盘、屋门的开关,还有我们用螺丝刀拧螺丝及松花江上渔民用马拉绞盘冬天捕鱼的绞盘都是这样一种轮轴杠杆在实际工作中的应用。
辩证唯物主义告诉我们,世界上的事物都是普遍联系的。一根硬棒,在力的作用下,绕着一固定点转动,这就构成了杠杆。当这种转动超过360°,则硬棒的运动轨迹便形成了“轮”,可见“杠杆”与“轮”并不是截然分开的,可以说“轮”是“杠杆”绕固定点的转动形成的。“杠杆”和“轮”在杠杆绕着一固定点的转动过程中被统一起来了。提笔至此对于变形杠杆到底是不是杠杆的问题还需要回答吗 ?
猜你喜欢
科学导报(2023年13期)2023-03-08
今日农业(2021年20期)2022-01-12
今日农业(2021年13期)2021-11-26
装备制造技术(2020年4期)2020-12-25
今日农业(2020年24期)2020-12-15
中小企业管理与科技(2019年34期)2019-12-23
汽车工程学报(2017年2期)2017-07-05
装备制造技术(2015年11期)2015-11-30
汽车零部件(2015年9期)2015-10-25
汽车科技(2015年2期)2015-08-25