
“嫦娥3号”月面探测器同波束干涉测量系统的设计与实现
2015-05-05 01:53吴伟仁刘庆会黄勇洪晓瑜节德刚李海涛
深空探测学报 2015年1期
吴伟仁,刘庆会,黄勇,洪晓瑜,节德刚,李海涛
(1.探月与航天工程中心,北京 100037;2.中国科学院 上海天文台,上海 200030;3.北京跟踪与通信技术研究所,北京 100094)
“嫦娥3号”月面探测器同波束干涉测量系统的设计与实现
吴伟仁1,刘庆会2,黄勇2,洪晓瑜2,节德刚1,李海涛3
(1.探月与航天工程中心,北京 100037;2.中国科学院 上海天文台,上海 200030;3.北京跟踪与通信技术研究所,北京 100094)
为了提高“嫦娥3号”探测器(着陆器和巡视器)的相对定位精度,针对两器信标实际设置情况,设计了同波束干涉测量(same-beam interferometry, SBI)观测方案。利用着陆器和巡视器星地对接数据分析检验了由差分群时延解算含微小系统差的差分相时延的方法,给出了甚长基线干涉测量(very long baseline interferometry,VLBI )和同波束干涉测量模型及月面定位方法,并仿真分析了巡视器的相对定位精度。最终,把研究的方法实际应用于“嫦娥3号”巡视器的精密相对定位。结果表明,利用1 h左右的连续观测弧段的着陆器数传信号以及巡视器数传信号(或遥测信号),采用事后处理方式,得到了随机误差约1 ps的差分相时延数据。利用此数据,把“嫦娥3号”探测器的相对定位精度提高至1 m左右。
同波束干涉测量;差分相时延;嫦娥3号;相对定位
0 引 言
我国探月工程分为“绕、落、回”三个阶段[1]。作为绕月探测的“嫦娥1号”和“嫦娥2号”探测器,主要完成绕月飞行及着陆区成像的探测任务[2-3], 二期的落月探测主要完成月球软着陆和自动巡视勘测任务[4-5]。作为二期落月探测任务之一的“嫦娥3号”(CE-3)是我国第一颗着陆月球的探测器,高精度定轨定位工作是保证CE-3顺利着陆的前提条件。在CE-3中,继续沿用无线电测距测速和VLBI的联合测轨模式,一些新设备新技术的应用大幅提高了CE-3的测轨定位精度。中国新建设的佳木斯深空站和喀什深空站投入使用,天线口径分别为66 m和35 m。上海65 m射电望远镜(天马望远镜)替代了佘山25 m射电望远镜,进一步增强了VLBI的测量能力,形成了天马(65 m)、北京(50 m)、昆明(40 m)和乌鲁木齐(25 m)4站和上海VLBI中心组成的VLBI测轨网。 CE-3的VLBI观测利用的是ΔDOR(delta differential one-way ranging,双差单向测距)差分VLBI技术,通过交替观测探测器及其附近(角距离一般小于15°)位置精确已知的河外射电源, 可以很好地消除公共误差源,大幅提高了测量精度。
对CE-3着陆器与巡视器进行高精度定位,是两器顺利完成各项月面探测任务的前提和保障,对于科学数据的分析也具有重要的意义。目前国际上对于火星和月球着陆器和巡视器定位的方法主要有基于地基无线电测距测速测量和干涉测量的定位法、航迹推算、视觉定位、地面影像与高分辨率探测器影像对比、天文导航等方法, 每种方法都有其自身的优点和局限。
基于地基测量定位是指利用地面跟踪站对着陆器和巡视器进行测距测速和干涉测量,从而确定探测器在天体中的位置。利用无线电信号的多普勒频移对“勇气号”和“机遇号”火星车进行定位,多次重复测量后在惯性参考系统中的定位精度可达1~10 m,而该位置转换到火固系的转换精度为 250 m。干涉测量同样在火星和月球的巡视器定位中得到应用。美国宇航局(National Aeronautics and Space Administration, NASA)利用S波段跟踪网对Apollo16和Apollo17巡视器的行走路线进行速度站间差分测量,在月球距离的分辨率约1 m,定位精度约25 m。利用VLBI差分测量数据对巡视器行走路线进行描述,所得结果与宇航员在巡视器星载导航系统上的读数的符合度约为50 m[6]。
航迹推算法是基于里程表和惯性导航器件(inertial measurement unit, IMU)计算巡视器的位置和姿态,不依赖于外界环境信息,是一种车上实时自主定位方法。航迹推算法的优点是功耗小、自主性强、计算简单、相对廉价。缺点是随时间漂移发散严重,特别是月面行驶速度慢、活动范围小、任务周期长,定位误差逐渐增大,需要利用其他高精度的定位方法对其定位误差进行修正。
基于着陆器视觉的导航定位技术需要在着陆器上安装立体视觉相机。当巡视器在着陆器的视野范围内进行巡视探测时,用着陆器上安装的立体视觉相机对巡视器及其所处的周围环境成像,根据图像中的视觉特征,例如根据巡视器的太阳能帆板边缘、轮子或其它特征进行区域分割,将巡视器从环境中分割出来,通过分析其周围环境的变化对巡视器进行相对定位。视觉定位方法可以得到较高的相对定位精度,其相对误差在2%~5%左右[7]。视觉定位方法的不足之处在于随着两器距离增加,测量绝对误差随之变大。
针对巡视器精密相对定位,文献[8]提出了一种基于SBI的方法,即利用射电望远镜的主波束同时观测着陆器和巡视器搭载的专门设计的多频点信标源,得到误差为皮秒量级的无整周模糊度的差分相时延数据。利用我国4个VLBI测站得到的差分相时延数据并结合高精度着陆区月面地形图,可以实现误差10 m的巡视器月面精密相对定位。SBI即利用射电望远镜的主波束对角距离很近的两个或多个探测器同时进行观测,通过在两个探测器间对VLBI时延进行差分,较彻底地除去大气、电离层及观测装置的影响,从而得到准确反映两个探测器相对位置的差分时延观测量。在阿波罗工程中,利用SBI对巡视器和着陆器进行了相对定位,其定位精度达到了25 m。在日本探月计划SELENE中,利用两个小探测器Rstar和Vstar的多频点同波束干涉测量数据和测速测距数据,把Rstar和Vstar的定轨精度提高至10 m左右[9-10]。但是,在“嫦娥3号”中,由于电力和载荷限制等原因,搭载专用的多频点星载信标源或视觉里程计较为困难。因此,针对“嫦娥3号”巡视器和着陆器的现实条件,如何实现高精度的巡视器相对定位成为了一个需要解决的课题。
为了实现巡视器的高精度相对定位,我们针对“嫦娥3号”着陆器和巡视器的实际信标,分析给出了同波束干涉测量观测方案,提出了利用同波束干涉测量技术解算含微小系统偏差的差分相时延并进行巡视器相对定位的方法。同波束干涉测量技术是CE-3任务中巡视器相对定位的唯一地面测量手段。本文利用“嫦娥3号”着陆器和巡视器星地对接数据,验证了由差分群时延解算含微小系统差的差分相时延的方法,并对巡视器的相对定位方法和精度进行了仿真分析。同时,把同波束干涉测量技术实际应用于“嫦娥3号”巡视器和着陆器的观测,得到了随机误差约1 ps的差分相时延数据。利用1 h左右的连续观测弧段的差分相时延数据,把“嫦娥3号”巡视器在各个停泊点的相对定位精度提高至1 m左右。
1 “嫦娥3号”同波束干涉测量系统方案设计
1.1 同波束干涉测量概念
同波束干涉测量技术的基本原理就是利用望远镜的主波束同时接收角距很小的两个或多个探测器的信标,得到两个或多个探测器信标的相关相位并在探测器间进行差分,得到差分时延观测量,如图1所示。

图1 “嫦娥3号”巡视器和着陆器同波束干涉测量系统概念图Fig.1 Same-beam interferometry for CE-3 rover and lander

从测量原理上,同波束干涉测量数据对两器相对位置有较强的约束能力,并且由于两器角距离相近,可以去掉传播路径中电离层、大气以及观测装置的绝大部分影响,得到的差分时延数据有更高的测量精度。在月面工作段,对着陆器和巡视器的同波束干涉测量时延测量模型如下:
(1)
其中:τR为巡视器到两个观测站的时延值;τL为着陆器到两个观测站的时延值。τR、τL作为干涉测量的时延的观测模型可简单的表示为
(2)
其中:c为光速;Δt为信号到测站1的光行时,可通过迭代进行解算;r(t-Δt)是信号发射时飞行器的位置和速度矢量;R1(t)信号是在t时刻到达第1站时的台站1的位置和速度矢量;R2(t+τt)为信号在t+τt到达第2站时的台站2的位置和速度矢量。
1.2 同波束干涉测量数据处理方法
“嫦娥3号”着陆器和巡视器信标如图2所示。着陆器发送载波和4个DOR侧音,或者发送带宽约5MHz数传信号。巡视器发送带宽8MHz或4MHz的数传信号或宽带4kHz的遥测信号。在着陆初期,我们利用着陆器的DOR信号对着陆器进行月面定位,其定位精度约50m[11-12]。在着陆后期,利用着陆器数传信号和巡视器的数传信号或遥测信号进行同波束干涉测量观测。由于着陆器与巡视器的信号的频率间隔较大,且VLBI测站已配置的观测装置带宽和测站通信网络速度等的限制,难以实现在同一通道内同时记录着陆器和巡视器的信号。为此,利用了两个带宽8MHz的通道分别记录着陆器的数传信号和巡视器数传信号或遥测信号。由于着陆器和巡视器的信号在不同的通道内记录,即使对两者的VLBI时延进行差分,仍无法完全去除观测装置本身的时延差,故利用强射电源观测予以改正。

图2 “嫦娥3号”着陆器和巡视器信标Fig.2 Signals of CE-3 rover and lander
数据处理基本方法如下。首先利用条纹旋转并对射电源观测时的相关相位进行5 min左右的积分处理,得到各基线、各通道的强射电源残余时延值,再对每5 min的数据在30 min的观测弧段内进行平均,得到各基线、各通道的强射电源平均残余时延值,并用这些数据改正着陆器和巡视器的不同通道的观测装置内部时延。其次对着陆器数传信号和巡视器的数传信号或遥测信号进行相关处理。对相关相位进行权值为相关幅度平方的加权线性拟合,分别得到着陆器和巡视器数传信号的残余群时延及中心频点处的拟合相位。在巡视器发送遥测信号时,提取载波频点处的相关相位。
由着陆器数传信号和巡视器数传信号中心频点处的相关相位计算二者之间的含有整周模糊度的残余差分相时延。从着陆器和巡视器残余群时延中扣除其所在通道的强射电源观测残余群时延之后做差分处理,得到着陆器和巡视器间的残余差分群时延。对一段观测时间内,含有整周模糊度的残余差分相时延和残余差分群时延做差分处理,同时整体平移残余差分相时延使二者之间的差分达到最小,此时的残余差分相时延即为最终的解算结果。由于相关处理时巡视器和着陆器的时延预测值相同,通过上述处理得到的残余差分相时延即为反映巡视器和着陆器相对位置的差分相时延观测量,可用于巡视器在某一停泊点的精密相对定位。
巡视器相对于着陆器的差分群时延Δτgd为:
(3)

巡视器相对于着陆器的差分相时延Δτpd(t)为
(4)
其中:φR(t)、φL(t)分别为巡视器和着陆器的相关相位;fR、fL分别为对应的射频接收频率,即fR=8 462 MHz、fL=8 496 MHz。对于同样的相位φR(t)和φL(t)的测量误差来说,差分群时延随机误差为纳秒量级,而差分相时延随机误差为皮秒量级,即差分相时延可大幅提高月球车的相对定位精度。在差分相时延中,含有整周模糊度C,主要由φR(t)和φL(t)中的整周模糊度引起。把含整周模糊度的差分相时延Δτpd(t)整体平移至差分群时延Δτgd(t)序列的中间,可以初步解算出C,使Δτpd仅具有微小的系统差。在一个连续的观测弧度内,只含有唯一一个固定的微小系统差。当观测弧段长度大于约1 h时,微小系统差可在巡视器相对定位过程中解算出来。所以,“嫦娥3号”巡视器相对定位提高的条件为:对巡视器和着陆器进行1 h以上的连续观测。
1.3 “ 嫦娥3号”着陆器和巡视器星地对接试验验证
图3给出了“嫦娥3号”着陆器和巡视器星地对接试验结果。星地对接试验时,着陆器的数传信号由两个通道同时记录,故可以在两个通道之间进行相关处理,从而得到相关幅度和相关相位。巡视器数传信号的记录和处理方法与着陆器相同。图3(a)和图3(b)分别为着陆器和巡视器的相关幅度,图3(c)和图3(d)分别为相关相位。由图3可以看出,对VLBI观测来说,着陆器数传信号的有效带宽约为4 MHz,而巡视器的约为7 MHz。利用着陆器和巡视器的相关相位可分别求出各自的群时延,得到着陆器和巡视器间的差分群时延。由图3(e)可知,差分群时延约有-3.95 ns的系统差,它是由观测装置各通道内部时延的不一致引起的,在“嫦娥3号”的正式观测中,可通过观测强射电源予以改正。利用中心频点处的相关相位分别求出着陆器和巡视器的相时延进而得到二者之间的含整周模糊度的差分相时延。我们把此差分相时延整体平移至差分群时延中间,从而得到了含微小偏移量的差分相时延数据,其结果如图3(e)所示。由图可知,差分相时延的随机误差远小于差分群时延,且没有差分群时延中的约0.1 ns的趋势变化项。

图3 “嫦娥3号”着陆器和巡视器星地对接试验结果(积分时间:1 s)Fig.3 Ground test results of CE-3 lander and rover(Integral time :1 s)
2 “嫦娥3号”巡视器相对定位方法及仿真分析
2.1 月面定位方法
(5)
观测方程和一般动力学统计定轨过程相同。ti时刻的观测量Yi与状态量Xi之间存在着一定的函数关系,可以表示为
(6)
其中Xi、Yi、εi分别为ti时刻的状态、观测以及观测噪声。
由于式(6)一般为非线性方程,需要对其线性化。将上式在参考状态X*(ti)处展开,并令
(7)
其中Φ(ti,t0)为状态转移矩阵,对着陆器定位来说,简化为单位阵。对观测方程略去二次以上的高阶项,得到
(8)
式(8)即为线性化的观测方程。
如令
则总的观测方程可写为
(9)
采用批处理算法,待观测结束后,用所有资料求某一历元时刻状态量的“最佳”估值,由于观测数据多,且具有统计特性,因此解算的精度较高。对探测器定轨而言,通常高精度的事后处理都采用批处理方法。
(10)

(11)
(12)
两器相对定位所使用的方法基于运动学统计定位法,具体描述如下:由于着陆器与处于导航停泊点巡视器固定在月面不动,两器相对于地球的运动完全由月球相对地球运动以及月球自身转动产生,利用一段时间内的同波束干涉测量差分时延数据及月球平动和转动的相关信息,将差分时延数据进行综合平差处理,最后获得巡视器和着陆器在月固系中的位置。仿真分析表明,着陆器位置误差不会显著影响巡视器的相对定位结果,所以本文在相对定位时考虑到着陆器位置已知,只解算巡视器位置;同时固定两器高程差,只解算经度和纬度两维参数。
2.2 巡视器相对定位仿真分析
针对巡视器和着陆器的月面相对定位问题,本文利用统计定位方法,即通过对巡视器和着陆器的一个连续观测弧段的同波束干涉测量技术,结合月面目标固定于月球表面这一运动条件,利用统计方法实现对巡视器和着陆器的精密相对定位。与经典的探测器动力学统计定轨不同,该方法根据月球的平动和转动模型建立巡视器或着陆器在空间的运动,而不是根据探测器受力建立动力学模型,因此不存在由于动力学模型误差导致的随弧段增大探测器状态精度变差的问题,巡视器或着陆器在惯性系的状态精度仅取决于物理天平动参数的精度。
为了评价利用差分相时延数据和物理天平动参数进行巡视器相对定位的精度,我们进行了仿真计算。仿真条件为:巡视器/着陆器位于虹湾地区,着陆器地理坐标为北纬44.1 °,西经31.5 °,高程值按照ULCN2005 (theunifiedlunarcontrolnetwork2005) 高程模型设为-3 338.0m。巡视器坐标为北纬44.0 °,西经31.4 °,高程值按照ULCN2005模型设为-3 333.0m。着陆器和巡视器相距约3km。测量数据为我国VLBI网上海、北京、昆明和乌鲁木齐四测站的同波束干涉测量差分相时延数据,测量随机误差为0.01ns。进行相对定位时,着陆器的先验位置(计算时的初值)为北纬44.13 °,西经31.53 °,高程为-3 238.0m,即着陆器的先验位置有1km的平面误差和100m的高程误差,巡视器的先验位置也同样取着陆器的先验值。考虑到着陆器的位置在其落月后已经确定得较准确,所以采用固定着陆器位置只解算巡视器位置的方法,即只计算巡视器相对于着陆器相对位置。
表1给出了仿真结果。表中的单点、5、10、20、30min分别表示定位时所用的数据长度, 0、0.2、0.5和1ns表示与乌鲁木齐测站有关的3条基线的差分相时延的系统差。因为在我国探月工程中,乌鲁木齐测站(25m天线)的接收能力最低,故此项仿真条件既是合理的又不失一般性。考虑到巡视器与着陆器相对位置较近(本次仿真时约3km)、虹湾地区比较平坦,且我国有精度数米的虹湾地区月面地形图(来自于“嫦娥2号”),故我们在解算巡视器相对位置时,利用月面地形图计算高程,而利用差分相时延数据只解算巡视器相对于着陆器在纬度和经度两个方向的相对位置。同时,为了比较固定高程和同时解算高程的差别,我们也给出了同时解算高程的定位结果。表中给出的数值为巡视器和着陆器的相对位置的定位误差(和真值的差),纬度和经度误差换算成了距离,单位为m。
表1 巡视器相对定位仿真分析结果
Table1Relativepositioningsimulationresultsbetweenaroverandlander

弧段长/m分类系统差/ns0(解算高程)0(固定高程)02(固定高程)05(固定高程)1(固定高程)单点5min10min20min30min纬度22280444-175-1058-2561经度22688009-699-1793-3596高程30904-500-500-500-500纬度1248287-326-1202-2690经度943020-687-1778-3577高程1853-500-500-500-500纬度1317282-325-1191-2665经度1614023-683-1773-3568高程1687-500-500-500-500纬度751282-314-1163-2607经度1047024-679-1765-3554高程903-500-500-500-500纬度013281-302-1134-2549经度313023-678-1761-3545高程115-500-500-500-500
表1可见,在差分相时延的系统误差为0 ns、随机误差为0.01 ns时,在同时解算纬度、经度和高程三个方向的情况下,巡视器的相对定位误差达到200~300 m。在只解算纬度、经度两个方向而把高程方向固定(允许-5 m误差)的情况下,巡视器的相对定位误差则降至数米。所以,利用高精度月面地形图解算高程对提高巡视器的相对定位精度非常重要。表1还可看出,差分相时延的系统误差变大时,巡视器相对定位误差基本按比例增加。如系统差由0.5 ns增大至1 ns、数据长度为5 min时,巡视器相对定位误差将由17.78 m增大至35.77 m(经度方向)。另外,在系统误差相同的情况下,延长数据长度对巡视器相对定位的进一步提高作用不大。但这并不意味着延长观测弧段不重要,因为差分相时延的系统误差在观测弧段加大时将变小,且观测弧段必须大于数分钟时才能解算差分相时延的系统误差。
3 同波束干涉测量技术在“嫦娥3号”中的应用分析
巡视器和着陆器于2013年12月14日成功分离后,利用同波束干涉测量技术对巡视器相对于着陆器的位置进行了测量。巡视器由数传天线发送数传信号,由遥测天线发送遥测信号,而着陆器一直发送数传信号。差分相时延反应的即为巡视器的数传天线或遥测天线的相位中心与着陆器的数传天线相位中心的位置差。图4(a)给出了“嫦娥3号”巡视器和着陆器间的差分相时延的例子。观测时间为2013年12月23日20~23 UT,巡视器停泊于S1点。由图4(a)可以看出,在21.5 UT附近的约0.5 h内, 6条基线的差分相时延有最大约0.01 ns的跳变。这是因为在此0.5 h内,巡视器由数传天线发送数传信号,而在其他时间段内巡视器由遥测天线发送遥测信号,而两个天线的安装位置不同,故出现跳变[13-14]。在3 h内,6条基线的差分相时延从整体看来有0.01~0.05 ns的缓慢变化。着陆器与处于停泊点的巡视器在月面不动,其相对于地球的运动完全由月球相对于地球的运动以及月球自身的转动产生。利用差分相时延在一段时间内的连续变化,可以利用运动学统计定位法对巡视器进行定位。其基本方案为利用一段时间内(1 h左右)的同波束干涉测量差分相时延数据以及月球平动和转动的相关信息,将差分时延数据进行综合平差处理,最后获得巡视器和着陆器在月固系中的位置。此方法与单点定位相比,可以更充分地利用连续弧段内的测量数据进行统计定位,弥补地月距离遥远引起的观测构型差的不足,解算每条基线上的差分相时延的系统差,提高定位精度。在定位计算时考虑到着陆器不动且位置精确已知,故只解算巡视器相对于着陆器的位置。同时考虑到着陆器附近地势平坦,且巡视器距离着陆器很近,根据着陆器数传天线和巡视器数传或遥测天线的相位中心的高度差固定高程,只解算平面两维方向的巡视器位置。利用巡视器遥测信号和着陆器数传信号得到的连续2~3 h的差分相时延数据,计算出的巡视器在A、B、C、D、E、S1停泊点相对于着陆器的位置如图4(b)和表2所示。

图4 “嫦娥3号”巡视器和着陆器间的差分相时延和相对定位结果Fig.4 Differential phase delay and relative positioning results between the rover and lander of CE-3
表2给出了利用差分相时延计算得到的巡视器相对位置,并和视觉定位结果做了比较,结果表明:基于差分相时延定位结果的差异在1 m左右。由于视觉定位计算结果对应于着陆器和巡视器车体机械中心参考点,而基于差分相时延定位结果为天线相位中心间的相对位置,因此两者结果在参考系定义上存在1~2 m的差异。目前的计算结果是假设相对高程为0,这个假设也存在约1 m的误差。和视觉定位结果比较表明:利用高精度的同波束干涉测量差分相时延数据,结合一定的数据处理策略,可以得到误差在米级的巡视器与着陆器的相对定位结果。
表2 巡视器和着陆器相对定位结果
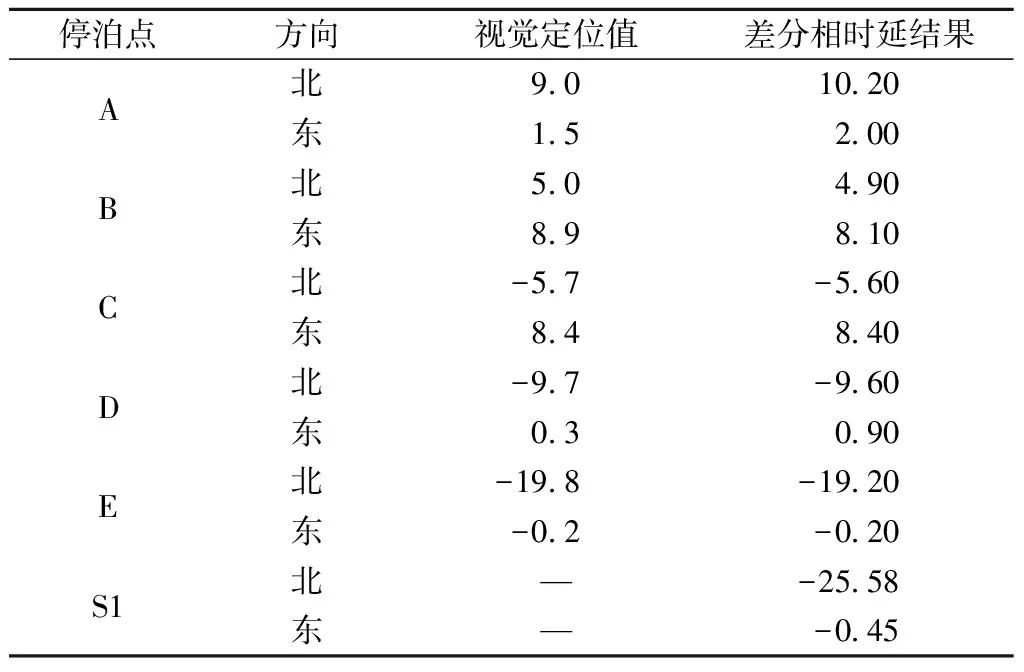
Table 2 Relative positioning results between the rover and lander of CE-3 m
4 结 论
利用“嫦娥3号”着陆器数传信号及巡视器数传信号和遥测信号,得到了随机误差1 ps的差分相时延数据。利用差分相时延数据,把“嫦娥3号”巡视器相对定位精度提高至约1 m。在现有信标的条件下实现了约1 m的相对定位精度,主要获得了下述条件和采取了下述措施:
1)在巡视器的各个停泊点,着陆器与巡视器同时连续发送数传信号或遥测信号1 h以上,得到了随机误差1 ps的同波束干涉测量差分相时延数据,同时在定位过程中解算出了差分相时延的系统误差。
2)巡视器和着陆器距离较近,拥有着陆区高精度月面地形图或着陆区地势平坦,只解算巡视器相对于着陆器的经纬度两个方向的位置,不解算高程。
3)着陆器本身的绝对位置以50 m左右的精度事先解算出来。
同波束干涉测量技术在今后的探月三期交会对接时的轨道器和上升器的精密测定轨、火星车和轨道器的测定位和测定轨中还将继续发挥更重要的作用。
[1] 欧阳自远.我国月球探测的总体科学目标与发展战略[J].地球科学进展,2004,19(3):355-357. [Ouyang Z Y. Scientific objectives of Chinese lunar exploration and development strategy[J]. Adv Earth Sci, 2004,19(3):355-357.]
[2] 吴伟仁,董光亮,李海涛,等.嫦娥二号工程月球辐射噪声影响研究[J].中国科学:信息科学,2011,41:903-911. [Wu W R, Dong G L, Li H T, et al. Research of the lunar noise for the project of CE-2[J]. Sci China Info, 2011,41:903-911.]
[3] 吴伟仁,黄磊,节德刚,等.嫦娥二号工程X频段测控通信系统设计与试验[J].中国科学:信息科学,2011(41):1171-1183. [Wu W R, Huang L, Jie D G, et al. Design and experiment of X-band TT&C system for the project of CE-2[J]. Sci China Info, 2011(41):1171-1183.]
[4] 吴伟仁,王大轶,李骥,等.月球软着陆避障段定点着陆导航方法研究[J].中国科学:信息科学,2011(41):1054-1063.[ Wu W R, Wang D Y, LI J, et al.Research of the pinpoint landing navigation method in the hazard avoidance phase of lunar landing[J]. Sci China Info, 2011(41):1054-1063.]
[5] 吴伟仁,王大轶,邢琰,等.巡视器巡视探测的双目视觉里程算法与实验研究[J].中国科学:信息科学,2011(41):1415-1422.[ Wu W R, Wang D Y, Xing Y, et al. Binocular visual odometry algorithm and experimentation research for the lunar rover[J]. Sci China Info, 2011(41):1415-1422.]
[6] Counselman C C, Hinteregger H F, Shapiro I I. Astronomical applications of differential in-terferometry[J]. Science, 1972(178):607-608.
[7] Liu Z Q, Di K C, Peng M, et al. High precision landing site mapping and rover localization for Chang’e-3 mission[J]. Science China Physics, Mechanics & Astronomy, 2015,58(1):1-11.
[8] 刘庆会,陈明,熊蔚明,等.基于超高精度多频点同波束干涉测量技术的巡视器精密相对定位[J].中国科学:物理学 力学 天文学,2010(40):253-260. [Liu Q H, Chen M, Xiong W M , et al.Relative position determination of a lunar rover by usinghigh-accuracy multi-frequency same-beam VLBI[J]. Sci China PMA, 2010(40):253-260. ]
[9] Liu Q, Kikuchi F, Matsumoto K, et al. Same-beam VLBI observations of SELENE for improving lunar gravity field model[J]. Radio Science, 2010(45):1-16.doi:10.1029/2009RS004203.
[10] Chen M, Liu Q H, Wu Y J, et al. Relative position determination of a lunar rover using biased differential phase delay of same-beam VLBI[J]. Sci China, phys Mech Astron, 2011,54(12):1-12.
[11] 黄勇,昌胜骐,李培佳,等.“嫦娥三号”月球探测器的轨道确定和月面定位[J].科学通报,2014(59):2268-2277. [Huang Y, Chang S Q, Li P J, et al. Orbit determination of Chang’E-3 and positioning of the lander and the rover[J]. Chin Sci Bull, 2014(59):2268-2277.]
[12] 李培佳,黄勇,昌胜骐,等.基于地基观测的嫦娥三号着陆器与巡视器高精度定位[J].科学通报,2014(59):3162-3173. [Li P J, Huang Y, Chang S Q, et al. Positioning for the Chang’E-3 lander and rover using Earth-based observations[J]. Chin Sci Bull, 2014(59):3162-3173.]
[13] Liu Q H, Zheng X, Huang Y, et al. Monitoring motion and measuring relative position of the Chang’E-3 rover[J]. Radio Science, 2014,49(11):1080-1086.
[14] 郑鑫,刘庆会,吴亚军,等.基于同波束干涉测量 差分相时延的“玉兔”月球车动作监视分析[J].中国科学:物理学 力学 天文学,2014(44):872-878. [Zheng X, Liu Q H, Wu Y J, et al. Motion monitoring and analysis of Chang’E-3 rover based on same-beam VLBI differential phase delay[J]. Sci Sin-Phys Mech Astron, 2014(44):872-878.] 作者简介: 吴伟仁(1953—),男,研究员,博士生导师,国防科工局探月与航天工程中心,中国探月工程总设计师。主要研究方向:测控通信与航天系统工程技术。 通信地址:北京市西城区车公庄大街12号10层(100037) 电话:(010)88306176 E-mail:wuwr2002@vip.sina.com 刘庆会(1966一),男,上海天文台研究员,博士生导师。主要研究方向:深空探测和VLBI技术。 通信地址:上海市南丹路80号(200030) E-mail:liuqh@shao.ac.cn
[责任编辑:宋宏]
Design and Realization of Same-Beam Interferometry Measurement of CE-3
WU Weiren1, LIU Qinghui2, HUANG Yong2, HONG Xiaoyu2, JIE Degang1, LI Haitao3
(1.Center of Lunar Exploration and Space Program, Beijing 100037, China;2.Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 200030, China;3.Beijing Institute of Tracking and Telecommunication Technology, Beijing 100094, China)
In order to improve the accuracy of relative position determination of a lunar explorer (lunar lander and rover), we designed the same-beam interferometry method according to the actual signals of the lander and the rover of CE-3. We analyzed the method for calibrating device internal delay using the strong radio source, gave the method for calculating the differential phase delay from group delay, and analyzed the accuracy of relative position determination by simulation. Finally, we used the same-beam interferometry to observe the rover and the lander of CE-3. As the results, using the lander’s data-transmission signal and the rover data-transmission or telemetry signal, the differential phase delay data were obtained with a 1ps random error, and the accuracy of rover relative position was improved to about 1 m.
same-beam interferometry; differential phase delay; CE-3; relative position determination
2014-11-10
2015-02-15
探月工程重大科技专项资助
P164
A
2095-7777(2015)01-0034-09
10.15982/j.issn.2095-7777.2015.01.005
猜你喜欢
学与玩(2022年6期)2022-10-28
计算机测量与控制(2021年8期)2021-08-23
航天器工程(2019年4期)2019-11-11
载人航天(2019年1期)2019-03-07
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
电子器件(2015年5期)2015-12-29
中学科技(2015年7期)2015-07-03
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10
