
基于参考标签的射频识别室内定位算法研究
2015-05-05 02:30孙寅博王宏刚
电视技术 2015年1期
孙寅博,王宏刚,李 波
(西安邮电大学 无线网络安全技术国家工程实验室,陕西 西安710061)
基于参考标签的射频识别室内定位算法研究
孙寅博,王宏刚,李 波
(西安邮电大学 无线网络安全技术国家工程实验室,陕西 西安710061)
针对现有基于RFID的LANDMARC室内定位系统会因外界环境因素导致优良的邻近参考标签丢失、不良的参考标签引入的问题,为此提出了一种改进的最近邻居算法,通过筛选已选取的邻近参考标签,实现最近邻标签的最佳选取。实验结果表明待测标签的定位精度得到有效提高。该算法有效获取到优良的参考标签,从而获得了满意的定位精度和定位性能。
室内定位;LANDMARC系统;RFID
近年来,随着物联网的兴起,工业、农业、商业和军事领域的研究者越来越关注基于无线传感器网络(Wireless Sensing Networks, WSN[1])和无线局域网(Wireless Local Area Networks, WLAN[2])等面向区域的定位技术。
对于某一节点,如果获得其当前所在的空间位置信息,则可以实现许多实用的功能,比如大型超市,每个货架放置一个WSN节点,购物车上安置一个收发器,顾客就可以根据自己的实时位置信息找到目标产品所在的货架。在医院内部署WSN节点,给病人随身携带一套生理指标监视器,一旦健康状况异常,医生可在第一时间赶到病人身边实施治疗。另外,室内定位在智能家居中的应用也越来越广泛。这些重要的潜在应用价值,引起了广泛的关注及研究。
根据应用场景的不同,定位分为室外定位和室内定位,而室内定位系统与室外定位系统因所处的环境条件不同而分别采用了不同的定位方法。对于室外定位,通常采用全球定位系统(GPS[3]),其需要直接视距通信卫星[4],而对于室内环境来说,却难以较好地实现。一方面卫星信号受到严重遮挡和衰减,卫星和接收机之间不存在视距传输通道;另一方面室内的环境比室外更加复杂,比如家具布局、人的移动等造成的信号的反射、散射及多径效应的问题,因此GPS无法提供足够的室内定位精度。
常见的室内定位技术有很多种,如基于红外[5]、超声波[6]、蓝牙[7]、射频识别(RFID)[8-12]、超宽带(UWB)[13]、WiFi[14]等定位技术。其中,基于RFID的定位技术优势明显,如:非接触、精度高、成本低等,为室内定位提供了一种新的解决方案,因而使其关注度越来越高,从而更多的人对其进行了广泛的深入研究。
当前基于RFID的室内定位常用的有SpotON系统[15]、Cricket系统[16]以及LANDMARC系统[17]等。SpotON系统根据信号强度分析,利用积集算法对三维空间中的待测标签进行定位,通过设计和定制的参考标签的无线信号衰减获取标签间的距离信息,但定位精度不够高,时效性也较差;Cricket是基于射频和超声波的TDOA定位系统,缺陷是:节点的坐标需要事先设置好,一旦环境改变,测量的定位误差会增大;LANDMARC系统引入位置固定的有源参考标签,通过它们提供检测距离方位内的标签信号强度信息来辅助定位。定位精度与参考标签的位置配置之间有很大关系,参考标签越少,定位结果越差;但参考标签越多,在一定程度上又增加了定位的成本,另外,增多的参考标签也会增加标签之间的干扰,从而降低定位的性能。但这种方法通过增加一些低成本的有源标签,减少成本昂贵的阅读器数量,在很大程度上降低了定位的成本,具有十分重要的价值,又因其可扩展性好,能适应较复杂的环境而被广泛采纳。
1 LANDMARC室内定位算法
LANDMARC是一种基于有源RFID的经典室内定位算法,它采用最近邻居算法,其核心思想采用建立在RSSI之上的质心算法,根据待测标签和参考标签之间的信号强度残差加权算法进行定位。
1.1 LANDMARC的算法描述
假设有M个阅读器、N个参考标签、L个待测标签,其中参考标签是布设在室内、位置已知的标签,其坐标分别为(x1,y1),(x2,y2),…,(xN,yN),而待测标签则是需要通过参考标签进行定位的标签。分布在室内中四角的阅读器,负责读取参考标签和待测标签的能量,并进行能量的量化(量化等级为8级)。定义阅读器接收的参考标签信号强度矩阵S∈RN×M为
(1)
式中:Sij表示第j个阅读器接收到的第i个参考标签的RSSI能量等级值。
定义阅读器接收的待测标签信号强度矩阵T∈RL×M为
(2)
式中:Tij表示第j个阅读器接收到的第i个待测标签的RSSI能量等级的值。
为了确定与待测标签相近的参考标签,以实现有效定位,需要定义待测标签与参考标签的关联矩阵
(3)

(4)
式中:Eij表示第i个待测标签与第j个参考标签之间信号强度的欧几里德距离。Eij越小,表明两个标签之间的空间距离越接近。
通过比较Eij值的大小,选出k个离待测标签最近的参考标签(即最近邻标签),k的值可以根据不同的应用环境进行设定。那么,第l个待测标签位置坐标的估计为

(5)
式中:wli为第i个参考标签在该待测标签位置估计中的权重。
距离待测标签较近的参考标签应该对位置精度的估计起较大作用,权重系数设置与关联度之间具有一定的关系。故权重设置为
(6)
可见,参考标签对应的Eli越小,它的权重wli越大。于是,第l个待测标签的定位误差为
(7)
式中:(xl0,yl0) 为待测标签的实际坐标;(xl,yl)是由式(5)计算的待测标签的估计坐标;el表示第l个待测标签的估计位置与其实际位置之间的误差,el越小,即定位误差越小,定位越精确。
1.2 LANDMARC中存在的问题
LANDMARC系统的定位精度很大程度上受到参考标签密度的影响[18], 另外RFID射频信号在复杂的室内环境下,会发生多径效应、反射、衍射等情况,通过矩阵E选择最近邻标签的时候,往往存在或多或少的偏差,从而导致LANDMARC系统定位中选择参考标签的随机性和不可预估性,如果选择到不良参考标签作为最近邻标签,那么必然影响到定位的精度。
如果要提高定位的精度,就需要寻找最适合的参考标签作为待测标签的最近邻标签。针对此问题,提出一种改进的最近邻居算法,优化最近邻标签的选取,降低不良参考标签的影响,进而改善LANDMARC系统的定位性能。
2 改进的最近邻居算法
2.1 改进算法的思想
为提高最近邻标签选择的精度,本文提出一种最近邻标签的筛选法,实现待测标签对邻近参考标签更为准确的选取,从而消除选取的不良参考标签造成的误差影响,进而提高了定位的精度。
2.2 改进算法的具体实现
首先,由式(5)可获得某个待测标签的坐标(x,y),这个待测标签用tagA表示,其选取的k个参考标签分别用tag1,tag2,…,tagk表示。

对于组G中的每一个参考标签的位置,可以通过待测标签和其他k-1个参考标签来计算出它的坐标。如tag1的坐标可以通过tagA,tag2,…,tagk这k个标签来确定,tag2的坐标可以通过tagA,tag1,tag3,…,tagk这k个标签来确定,同理依次可以获得tag3,tag4,…,tagk的坐标。
分别对比这k个参考标签的真实位置,获得它们各自对应的误差err1,err2,…,errk。比较k个参考标签的误差,选取k′个误差值较小的参考标签为待测标签最终选取的邻近参考标签(k′ (8) 式中:errli表示对于待测标签l,第i个参考标签相对待测标签l的估计误差。 最后通过式(5)计算出待测标签的最终位置(xfinal,yfinal)。整个算法流程如图1所示。 图1 算法流程图 仿真中,因为是根据标签的RSSI值来估计待测标签的位置,在这里选择的路径损耗模型为 (9) 式中:d0是参考距离;P0是距离为d0时接收到的信号强度,即单位距离的自由空间损耗;d是真实距离;ζ是遮蔽因子,其均值0;标准差为σdB的正态随机变量;P是接收时衰减的信号强度;n是路径损耗指数。 通过对LANDMARC算法及其对应的改进的最近邻居算法分别进行仿真,进而评估改进算法的定位效果。仿真中使用研究报告中的参数[19],在9m×9m的室内环境中,在4个角落放置4个阅读器,在定位区域内将16个参考标签按4×4均匀分布,参考标签之间的间隔为2m,20个待测标签随即分布在室内,k=6, k′=4,仿真结果如图2所示。 图2 LANDMARC算法与改进算法的误差累积分布图 由图2可见,两种算法在定位误差为0.5m内的标签分别占待测标签总数的10%,30%;定位误差在1m以内时,两种算法所定位的标签分别占待测标签总数的50%,90%。改进的算法对于定位精度的提高是非常明显的。 针对每个待测标签,两种算法的比较如图3所示。 图3 LANDMARC算法与改进算法的比较 大多数待测标签的定位精度得到了改善,部分待测标签的定位精度提升明显。而6,12,14,17,20这5个待测标签的改进算法的误差稍微偏高。其主要因为标签密度所造成的影响。通过加入虚拟标签的方法,对这些待测标签的定位能提供一定的帮助,具体的实现会在今后做进一步的研究。 LANDMARC系统中的最近邻居定位算法,提出了相应的改进算法。通过对最近邻居参考标签选取的优化,避免不良标签的引入而造成对待测标签的影响。实验表明,改进的算法在对待测标签的定位精度有了很大的提高。 [1]KWONOH,SONGHJ,PARKS.Theeffectsofstitchingordersinpatch-and-stitchWSNlocalizationalgorithms[J].IEEETrans.ParallelandDistributedSystems,2009,20(9):1380-1391. [2]IVANOVS,NETTE,SCHEMMERS.AutomaticWLANlocalizationforindustrialautomation[C]//Proc.IEEEInternationalWorkshoponFactoryCommunicationSystems.Dresden:IEEEPress,2008:93-96. [3]ENGEP,MISRAP.Specialissueonglobalpositioningsystem[J].ProceedingsoftheIEEE,1999,87(1): 3-15. [4]BOONTRAID,JINGWANGSAT,CHERNTANOMWONGP.IndoorlocalizationtechniqueusingpassiveRFIDtags[C]//Proc. 9thInternationalSymposiumonCommunicationsandInformationTechnology.Icheon:IEEEPress,2009:922-926. [5]WANTR,HOPPERA,FALCOV,etal.Theactivebadgelocationsystem[J].ACMTrans.InformationSystems,1992,10(1):91-102. [6]SMITHA,BALAKRISHNANH,GORACZKOM,etal.Trackingmovingdeviceswiththecricketlocationsystem[C]//Proc. 2ndACMInternationalConferenceonMobileSystems,Applications,andServices.Boston:MobiSysPress,2004:190-202. [7]EDWARDR,JELLINEKL.Informationexchangeviabluetoothservicediscoveryprotocolservicerecords:US,8074481B2[P]. 2011-11-17. [8]BASSMA.Radiofrequencyidentification(Rfid)systemformanufacturingdistributionandretailingofkeys:US,8074481B2 [P]. 2011-12-13. [9]WANTR.AnintroductiontoRFIDtechnology[J].IEEEPervasiveComputing,2006,5(1):25-33. [10]SHIREHJINIAAN,YASSINEA,SHIRMOHAMMADIS.EquipmentlocationinhospitalsusingRFID-basedpositioningsystem[J].IEEETrans.InformationTechnologyinBiomedicine,2012,16(6):1058-1069. [11]SHOARINEJADK,SOLTANM,MOSHFEGHIM.Rfidlocationsystemsandmethods:US,8754752B2 [P]. 2014-06-17. [12]LIUYongbo,DUHuaichang,XUYe.TheresearchanddesignoftheindoorlocationsystembasedonRFID[C]//Proc.FourthInternationalSymposiumonComputationalIntelligenceandDesign.Hangzhou:IEEEPress,2011:87-90. [13]TANLin,JINLong,YANGGuoqing.Acompactultra-wideband(UWB)bandpassfilterusingmicrostripT-shapedstub[C]//Proc.InternationalConferenceonComputationalProblem-Solving.Chengdu:IEEEPress,2011:382-384. [14]NOBUOK.WiFilocationinformationsystemforbothindoorsandoutdoors[C]//Proc. 10thInternationalWork-ConferenceonArtificialNeuralNetworks.Salamanca:SpringerBerlinHeidelbergPress,2009:638-645. [15]HIGHTOWERJ,WANTR,BORRIELLOG.SpotON:anIndoor3DlocationsensingtechnologybasedonRFsignalstrength[R].Seattle:[s.n.],2000. [16]PRIYANTHANBCHAKRABORTYA,BALAKRISHNANH.Thecricketlocation-supportsystem. [C]//Proc. 6thAnnualInternationalConferenceonMobileComputingandNetworking(MOBICOM).NewYork:ACMPress,2000:32-43. [17]NILM,LIUYH,LAUYC,etal.LANDMARC:indoorlocationsensingusingactiveRFID[C]//Proc. 1stIEEEInternationalConferenceonPervasiveComputingandCommunications.FortWorth:IEEEPress,2003:407-415. [18]闫保中,姜琛,尹伟伟. 基于RFID技术的室内定位算法研究[J]. 计算机仿真,2010,27(2):320-324. [19]BEKKALIA,SANSONH,MATSUMOTOM.RFIDindoorpositioningbasedonprobabilisticRFIDmapandKalmanfiltering[C]//Proc. 3rdIEEEInternationalConferenceonWirelessandMobileComputing,NetworkingandCommunications.WhitePlains,NY:IEEEPress,2007:21. 孙寅博(1984— ),硕士生,主研无线通信; 王宏刚(1977— ),讲师,博士,主研无线通信、射频识别、无线传感器网络等; 李 波(1980— ),讲师,博士,主研宽带无线通信。 责任编辑:许 盈 Research of RFID Indoor Location Algorithm Based on Reference Tags SUN Yinbo, WANG Honggang, LI Bo (NationalEngineeringLaboratoryforWirelessSecurity,Xi’anUniversityofPostsandTelecommunications,Xi’an710061,China) Due to the miss of fine nearest neighbors and misuse of bad neighbors because of the environmental factors, the performance of the LANDMARC RFID-based indoor location system will be degraded significantly. An improved LANDMARC locating algorithm via selecting the nearest neighbor reference tags among the selected ones is proposed, and the experimental results show that performance of the proposed algorithms is improved. This algorithm can effectively get the nearest neighbors and achieve a better performance for location sensing. indoor location; LANDMARC system; RFID 陕西省国际合作项目(2013KW01-03) TN92 A 10.16280/j.videoe.2015.01.028 2014-09-05 【本文献信息】孙寅博,王宏刚,李波.基于参考标签的射频识别室内定位算法研究[J].电视技术,2015,39(1).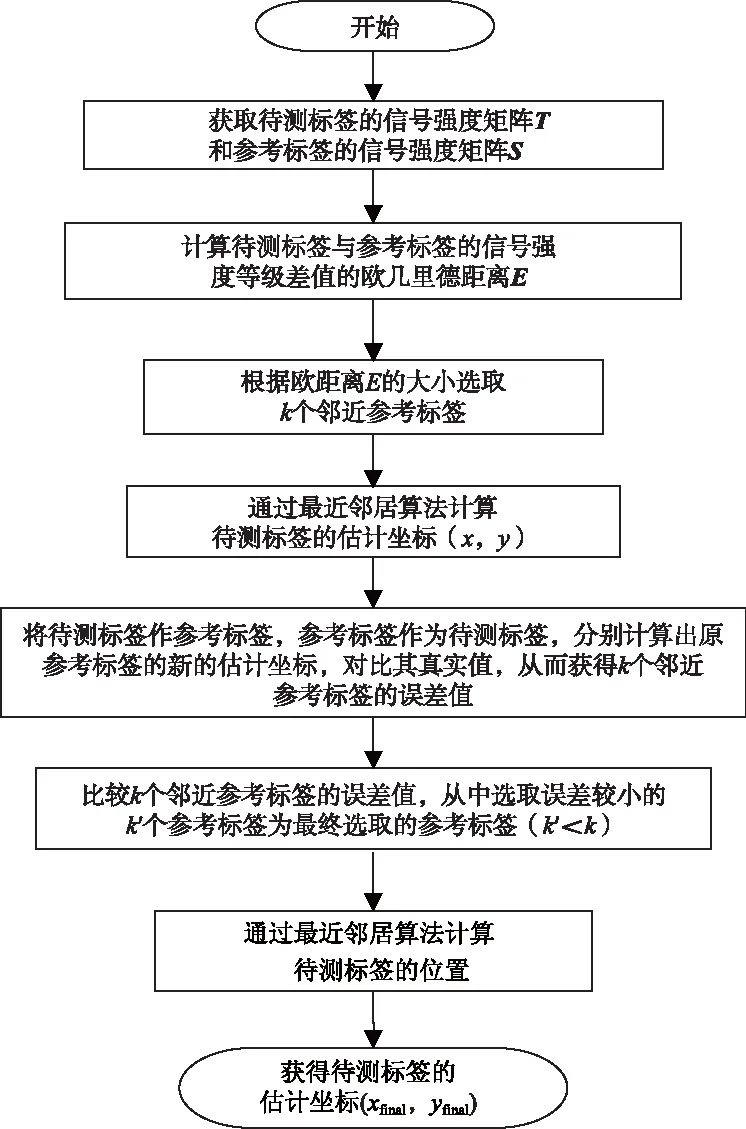
3 仿真模型和结果

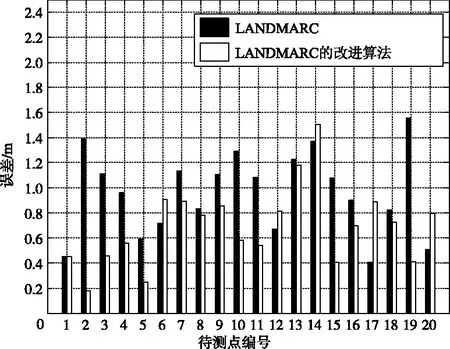
4 小结
猜你喜欢
电子设计工程(2022年15期)2022-08-17
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
英语世界(2020年10期)2020-11-06
英语世界(2020年2期)2020-03-08
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
现代测绘(2018年1期)2018-03-06
雷达学报(2017年1期)2017-05-17
